LUDV系统可以克服常用负载传感系统的缺点,但LUDV阀价格较高,对于900t运梁车,转向执行机构共32套,全部更换LUDV阀会增加很多成本,并且会造成很大浪费。针对运梁车转向系统的特点和要求,对原液压转向系统进行改进,研制了运梁车转向同步控制系统——电子LUDV系统,4M4-12片式多路阀为电液比例阀,阀芯的特性曲线如图3-52所示。
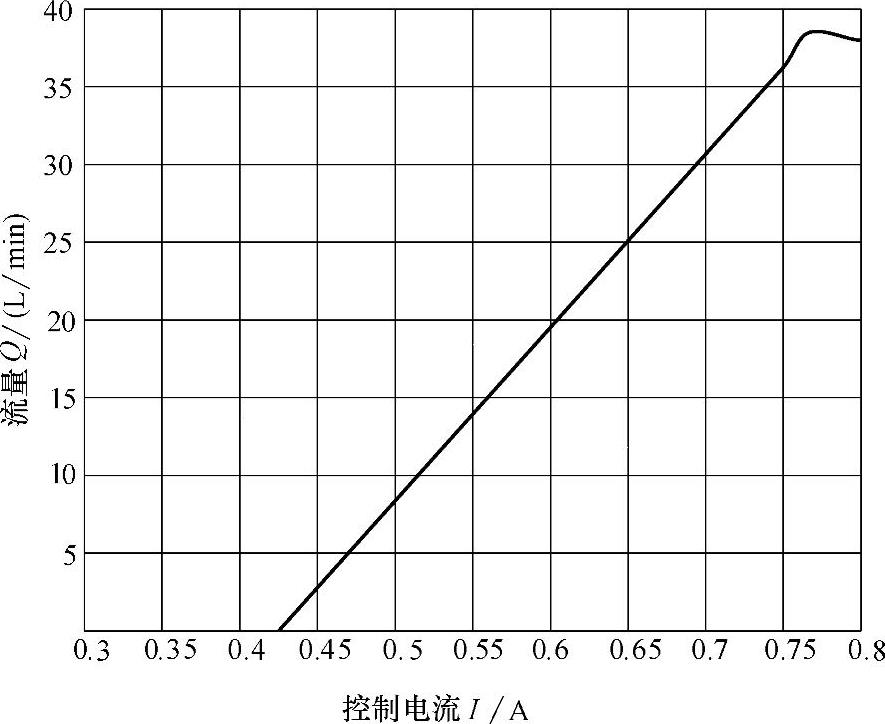
图3-52 阀芯特性曲线
由阀芯特性曲线可以看出,给定一个控制电流,就可以得到此控制电流对应的阀芯流量。当运梁车以某一角度转向时,每个比例方向阀的控制电流为Ii,可以得到每个方向阀阀芯的流量为Qi,其中i=1,2,3,…,32。则控制转向机构的总流量为

通过发动机的转速传感器可以检测到发动机的转速,此时,转向变量泵能提供的最大流量为

式中 Vmax——转向变量泵的最大排量,mL/r;
n——发动机转速,r/min。
当Q总<Qmax时,转向变量泵提供的流量能够满足转向执行机构所需要的流量,通过各转向多路阀压力补偿阀的压差都能达到补偿压力,各压力补偿阀都能起到调节作用,转向执行机构同时工作时可以互不干扰地完成复合动作。当Q总>Qmax时,转向变量泵提供的流量不能够满足转向执行机构所需要的流量,液压油会首先供给低负载转向执行机构,而高负载转向执行机构由于供油不足,达不到压力补偿阀起作用的压力,高负载转向执行机构速度降低,甚至不动,运梁车的转向同步性就受到破坏。(https://www.daowen.com)
当Q总>Qmax时,设

则
Qmax=Q总k (3-7)
将式(3-7)代入式(3-4)可得

由式(3-8)可以看出,每个转向控制阀的流量按一定比例k减小后,转向变量泵的流量就满足转向执行机构所需要的总流量,相应的控制电流Ii′为
Ii′=Iik (3-9)
通过同比例减小转向电液比例阀的控制电流可以降低转向液压缸转向所需要的总流量,使转向液压泵输出的流量始终大于转向执行机构所需的总流量,这样就实现了基于常用负载传感系统的LUDV系统,即电子LUDV系统。电子LUDV系统在发动机低转速时会降低运梁车的转向速度,但由于运梁车的行驶速度很低,对转向速度的要求不是很高,通过测试,电子LUDV系统对运梁车是完全适用的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






