设有如图7.2.1a所示的单节点刚架,其上各杆件均为等截面直杆。在一般忽略杆件轴向变形的情形下,该节点不发生线位移而只能有角位移。设在该节点1作用一集中力矩M,有三杆相交于点1。三杆的远端分别为铰接、固接和滑动支座。规定杆端弯矩与节点力矩(外力矩)均以顺时针为正,正号杆端弯矩反作用在节点隔离体,为逆时针方向。
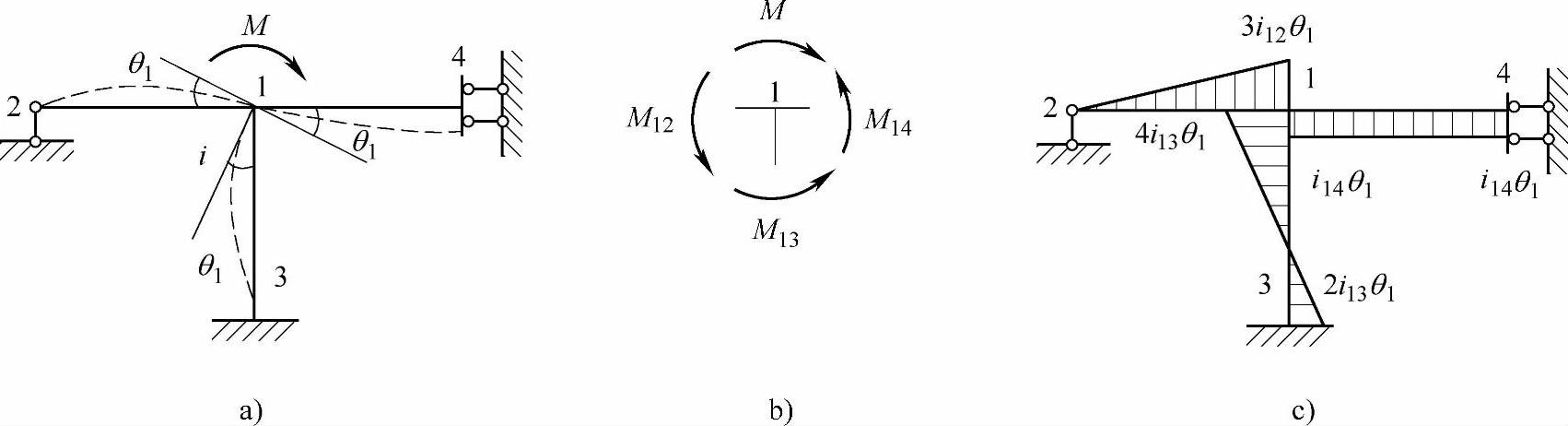
图 7.2.1
(一)转动刚度S
1.杆端的转动刚度S1k
1k杆1端的转动刚度表示在1k杆的1端产生一单位转角时,在该杆端所需作用的弯矩。它反映了杆件杆端抵抗转动的能力。它的值取决于杆件的线刚度i和杆件另一端的支承情况。例如,12杆的远端是铰支端,S12=3i;13杆的远端是固定端,S13=4i;14杆的远端是定向支座,S14=i。
2.节点的转动刚度
 表示汇交于节点1所有杆件在1端的转动刚度之和,称为节点转动刚度。其含义是使节点发生一单位转角θ=1所需的总力矩。
表示汇交于节点1所有杆件在1端的转动刚度之和,称为节点转动刚度。其含义是使节点发生一单位转角θ=1所需的总力矩。
(二)分配系数μ
在M作用下,节点1产生转角位移θ1。由上节所述的杆端转动刚度的定义可以写出各杆端弯矩(θ1尚为未知)。
和节点1相交的各杆端弯矩,称近端弯矩,查表7.1.1知:

式(b)说明:汇交于刚节点1的各杆杆端弯矩之和等于刚节点上的外力矩M;或者说,刚节点1的外力矩M由汇交于该刚节点的各杆杆端“承担”。将式(a)代入式(b)。解得

将θ1代回式(a)和式(b),即可求出各杆的杆端弯矩值如下:
近端弯矩
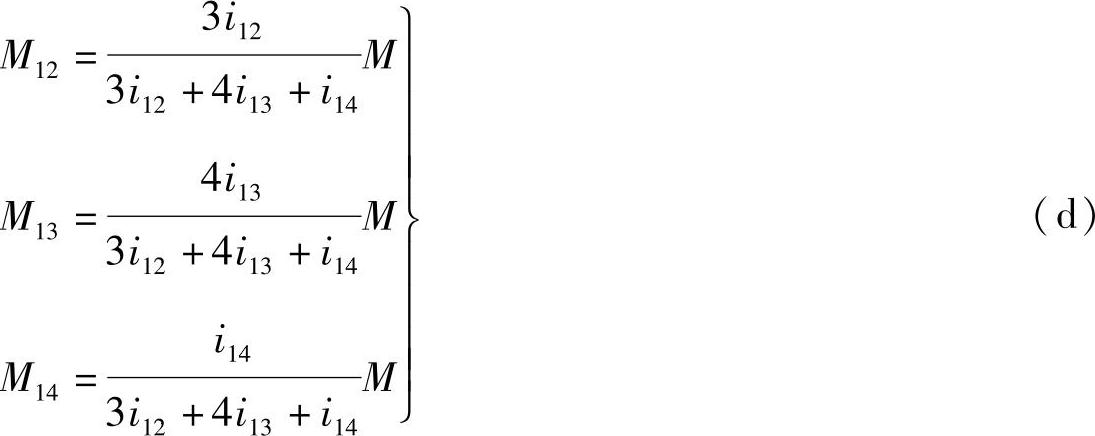
式(d)中的各杆近端弯矩可统一写成(www.daowen.com)

μ1k称为力矩分配系数。是汇交于节点1的1k杆1端的分配系数,等于该杆1端的转动刚度S1k与该节点的转动刚度∑S1k之比值。而∑μ1k=1,即汇交于同一节点各杆的分配系数之和应等于1,体现了节点的平衡条件。
(三)传递系数C
在M作用下,节点1产生转角位移θ1后。
远离节点1的各杆另端的弯矩,称远端弯矩,查表7.1.1知:
M21=0
M31=2i13θ1
M41=-i14θ1
将θ1代入上式得远端弯矩
式(e)中的各杆远端弯矩可统一写成
Mk1=C1kM1k (f)
式中 C1k——1k杆1端向k端的传递系数。
传递系数即表示当杆件近端(与节点相交端)发生转角时,远端(远离节点的杆件另一端)弯矩与近端弯矩的比值。对于不同的远端支承情况,相应的传递系数也不同。数值如下:
远端为固定支座 
远端为滑动支座 C=-1
远端为铰支座 C=0
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






