1.指令格式及功能
PID指令的功能是进行PID运算。其指令格式及功能如表7-14所示。
表7-14 PID回路控制指令格式及功能

2.指令说明
1)程序中可使用8条PID指令,编号分别为0~7,不能重复使用。
2)使ENO=0的错误条件:0006(间接地址),SM1.1(溢出,参数表起始地址或指令中指定的PID回路号操作数超出范围)。
3)PID指令不对参数表输入值进行范围检查。必须保证过程变量当前值、给定值积分项前值和过程变量前值在0.0和1.0之间。
3.回路表
回路表包含9个参数,用来控制和监视PID运算。回路表格式如表7-15所示。
表7-15 PID控制回路的参数表(https://www.daowen.com)
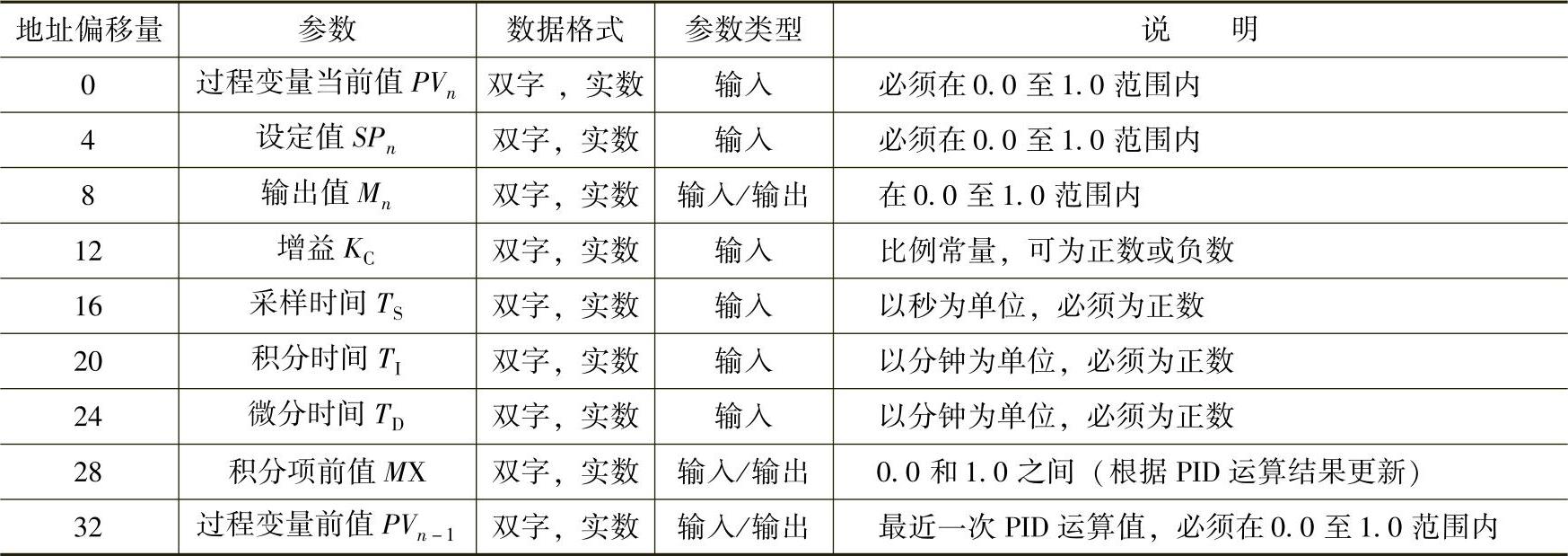
若要以一定的采样频率进行PID运算,采样时间必须输入到回路表中,且PID指令必须编入定时发生的中断程序中,或者在主程序中由定时器控制PID指令的执行频率。
4.控制方式
S7-200 PLC的PID回路没有设置控制方式,只有当PID控制器接通时,才执行PID运算。从这种意义上说,PID运算存在一种“自动”运行方式。当PID运算不被执行时,称为“手动”模式。同计数器指令相似,PID指令有一个使能位。当该使能位检测到一个信号的正跳变(从0到1)时,PID指令执行一系列的动作,使PID指令从手动方式无扰动地切换到自动方式。为了达到无扰动切换,在转变到自动方式前,必须把手动方式下的输出值填入回路表中的Mn栏。PID指令对回路表中的值进行下列操作,以保证当使能位正跳变出现时,从手动方式无扰动切换到自动方式。
1)置给定值(SPn)=过程变量(PVn)
2)置过程变量前值(PVn-1)=过程变量现值(PVn)
3)置积分项前值(MX)=输出值(Mn)
PID使能位的默认值是1,在CPU启动或从STOP方式转到RUN方式时建立。CPU进入RUN方式后首次使PID块有效,由于没有使能位的正跳变,就不能进行无扰动切换。
在许多控制系统中,有时只应用一种或两种环路控制的方法。例如,可能只需要比例控制或比例积分控制。选择期望的环路控制类型通过设置常量参数的数值来进行。如果不需要积分操作,应将积分时间常数设置为无穷大“INF”;如果不希望微分操作,应将微分时间数值设置为0.0;如果不希望比例操作,应将增益设置为0.0。
如果指令指定的回路表起始地址或PID回路号操作数超出范围,那么在编译期间,CPU将产生编译错误,导致编译失败。PID指令不检查回路表中的值是否在规定范围之内,因此,必须保证过程变量和设定值在0.0~1.0之间。如果PID计算的算术运算发生错误,那么特殊存储器标志位SM1.1(溢出或非法值)会被置1,并且中止PID指令的执行。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






