经验设计法是PLC控制系统梯形图设计的一种常用方法,一般用于控制方案简单,I/O端子数规模不大的控制系统的梯形图设计。
1.设计方法
在一些基本控制程序或典型的控制电路程序的基础上,根据被控制对象的具体要求,进行选择组合,并反复调试和修改梯形图,有时需增加一些辅助触点和中间编程环节,才能达到控制要求。
这种方法没有规律可遵循,设计所用的时间和设计质量与设计者的经验有很大的关系,所以称为经验设计法。
2.设计步骤
用经验设计法设计PLC程序时,大致可以按下面步骤进行:
1)分析控制要求、合理确定I/O设备。
2)确定输出信号的关键控制点,设计梯形图控制程序。
3)检查修改和完善程序。
3.设计特点
经验设计法主要是依靠设计人员的经验来进行设计,对设计人员的要求也就比较高,特别是要求设计者有一定的实践经验,对工业控制系统和工业上常用的各种典型环节比较熟悉。一般适用于设计一些简单的梯形图程序或复杂系统的某一局部程序(如手动程序等)。如果用来设计复杂系统的梯形图,存在以下两个问题:
1)考虑不周、设计麻烦、设计周期长。用经验设计法设计复杂系统的梯形图程序时,要用大量的中间元件来完成记忆、互锁、连锁等功能,由于需要考虑的因素很多,它们往往又交织在一起,分析起来非常困难,并且很容易遗漏一些问题。修改某一局部程序时,很可能会对系统其他部分程序产生意想不到的影响,往往花了很长时间,还得不到一个满意的结果。
2)梯形图的可读性差、系统维护困难。用经验设计法设计的梯形图是按设计者的经验和习惯进行的设计。因此,他人要分析这种程序较困难,给PLC系统的维护和改进带来不便。
【例4-23】PLC控制送料小车的经验设计。
如图4-36所示,为小车自动左右往复运动的系统,小车开始时停在左限位开关SQ1处,按下右行启动按钮SB2,小车右行,到限位开关SQ2处时停止运动,10s后定时器T38的定时到,小车自动返回起始位置。
设计实现过程如下。(https://www.daowen.com)
1)明确控制的要求,画出I/O端子接线图。
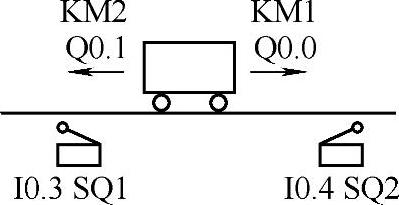
图4-36 送料小车运动系统示意图
根据案例说明可知,输入信号有SB1、SB2、SB3、SQ1、SQ2和热继电器FR,输出信号有KM1和KM2。考虑到控制系统的可靠性,在PLC输出的外部电路KM1和KM2的线圈前增加常闭触点作硬件互锁。PLC的外部接线图如图4-37所示。
2)设计各输出信号的梯形图控制程序。
输出信号仅有KM1和KM2,属于简单控制系统,小车左行和右行控制实际上是电动机的正反转控制。因此,可以在电动机正反转控制基础上,设计出满足要求的梯形图。如图4-38所示。
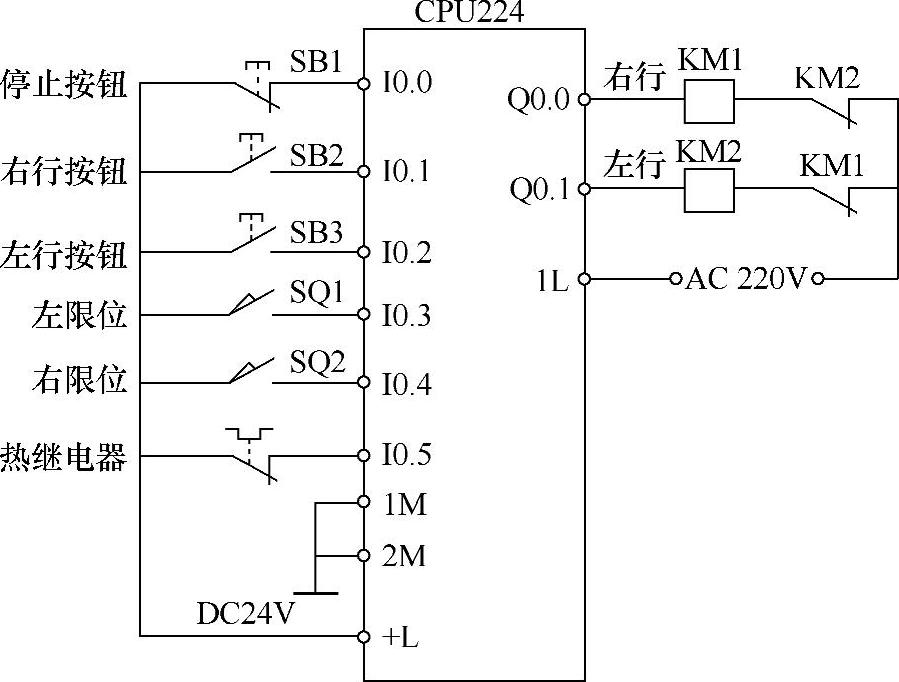
图4-37 PLC的外部接线图
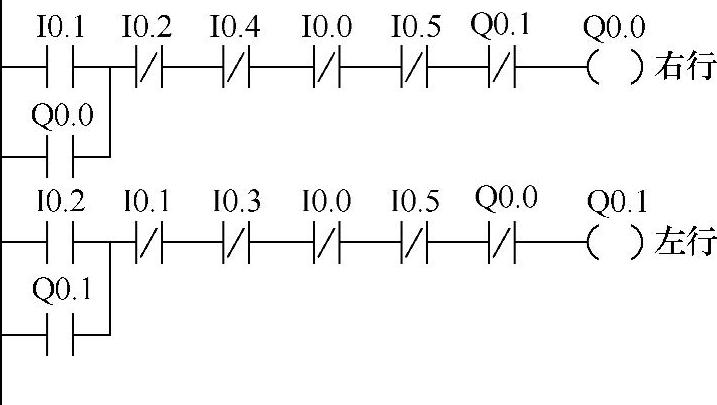
图4-38 输出信号的梯形图控制程序
3)检查完善。
在关键输出信号Q0.0和Q0.1的梯形图基础上,补充遗漏的定时控制功能,优化完善后梯形图如图4-39所示。
本例的设计关键在于,小车的左行和右行控制的实质是电动机的正反转控制,使用电动机的正反转控制结合起保停基本控制程序,完成梯形图的程序设计。在设计程序时,为了使小车向右的运动自动停止,将右限位开关对应的I0.4的常闭触点与控制右行的Q0.0串联。为了在右端使小车暂停10s,用I0.4的常开触点来控制T38。T38的定时时间到,其常开触点闭合,给控制Q0.1的起保停控制提供启动信号,使Q0.1通电,小车自动返回。小车离开SQ2所在的位置后,10.4的常开触点断开,T38被复位。回到SQ1所在位置时,I0.3的常闭触点断开,使Q0.1断电,小车停在起始位置。
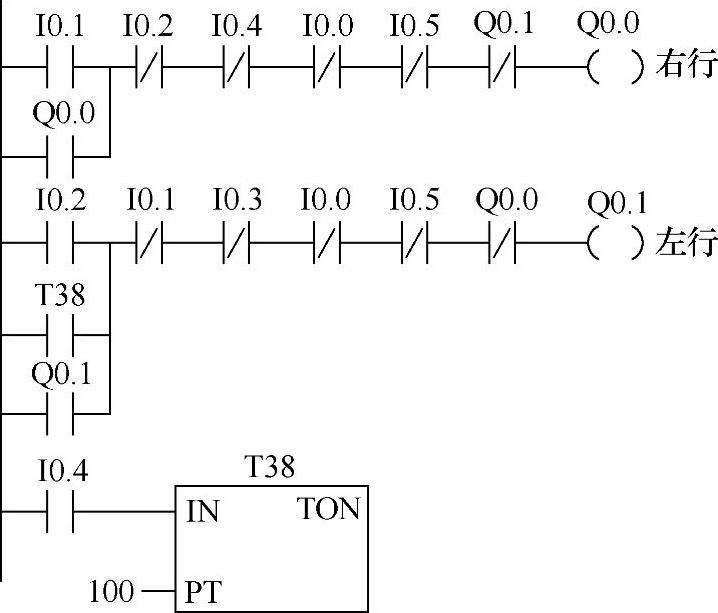
图4-39 完善的控制梯形图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




