(1)计算方法中使用的符号和代号的含义、单位(见表13-73)
(2)空程计算
1)齿轮副的空程计算 折算到齿轮副图13-9从动轴上的最大、最小空程为
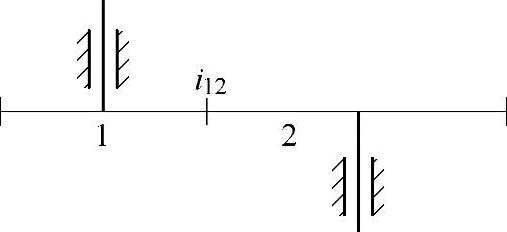
图13-9 齿轮副
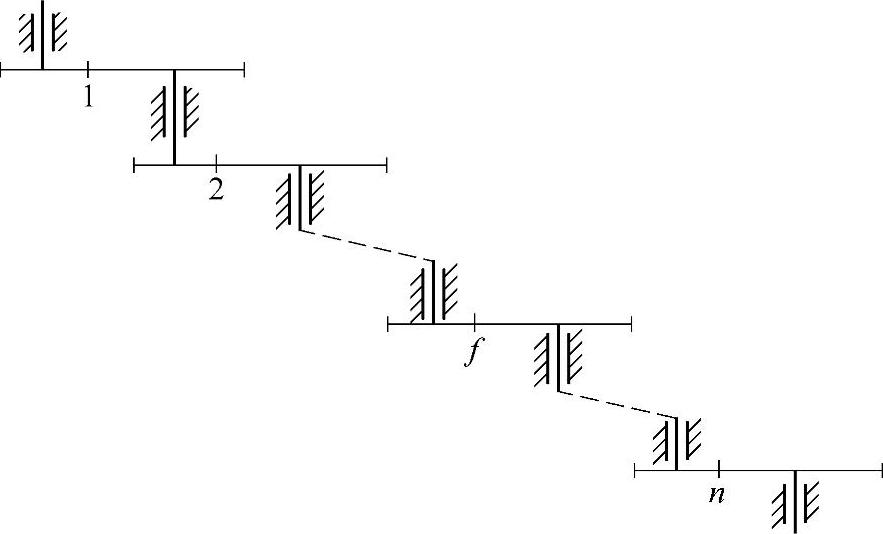
图13-10 传动链
2)传动链的空程计算 将各级空程折算到输出轴上,则传动链图13-10的最大、最小空程为

表13 - 73 符号和代号及其含义和单位(SJ/T 2557—1984)
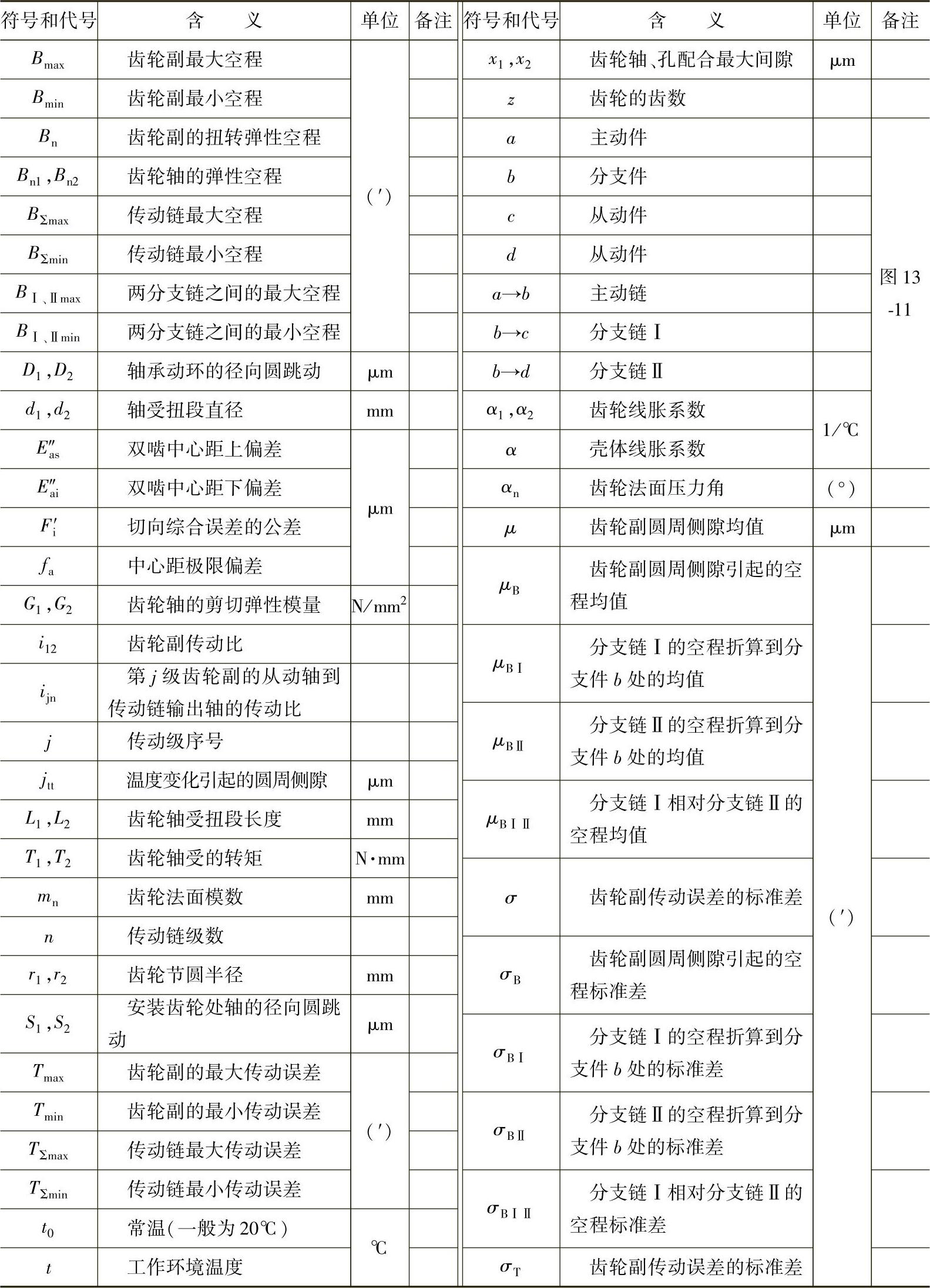
注:脚注1、2为齿轮副的主动、从动轴或主动、从动轮。
3)分支传动链的空程计算 分支传动链原理示意图如图13-11中两分支链之间的最大、最小空程为
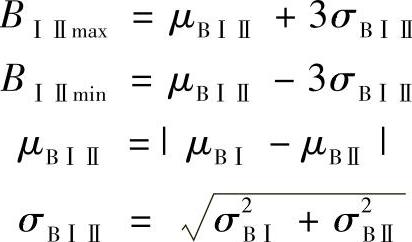
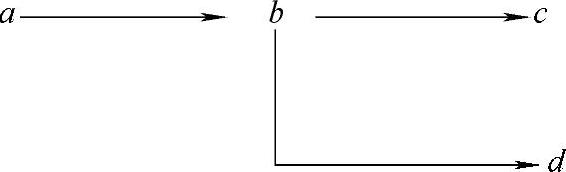
图13-11 分支传动链原理示意图
(4)传动误差计算
1)齿轮副的传动误差计算 折算到齿轮副图13-9从动轴上的最大、最小传动误差为

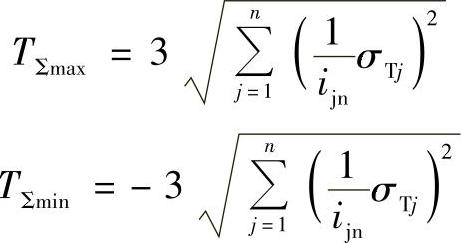
2)传动链的传动误差计算 将各级传动误差折算到输出轴上,则传动链图13-10的最大、最小传动误差为
 (https://www.daowen.com)
(https://www.daowen.com)
(5)计算示例
例13 - 3 在图13-12中,当转动轴Ⅲ时,计算分支传动链轴Ⅰ到轴Ⅱ的最大空程。
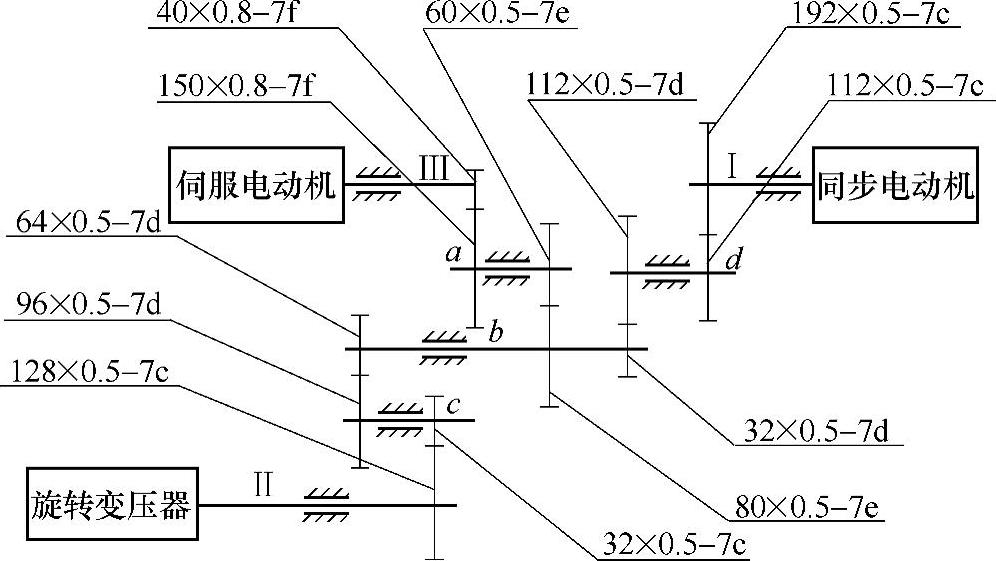
图13-12 传动示意图
已知条件:轴承均采用E18、E26、E200型号,齿轮孔径公差为H7,轴径公差为h6,轴的径向圆跳动为7级。
解:分支传动链的空程计算应按增速传动链的方法进行。将齿轮、轴、轴承、中心距极限偏差对应的精度等级公差、偏差查出,并记录在表13-74内。
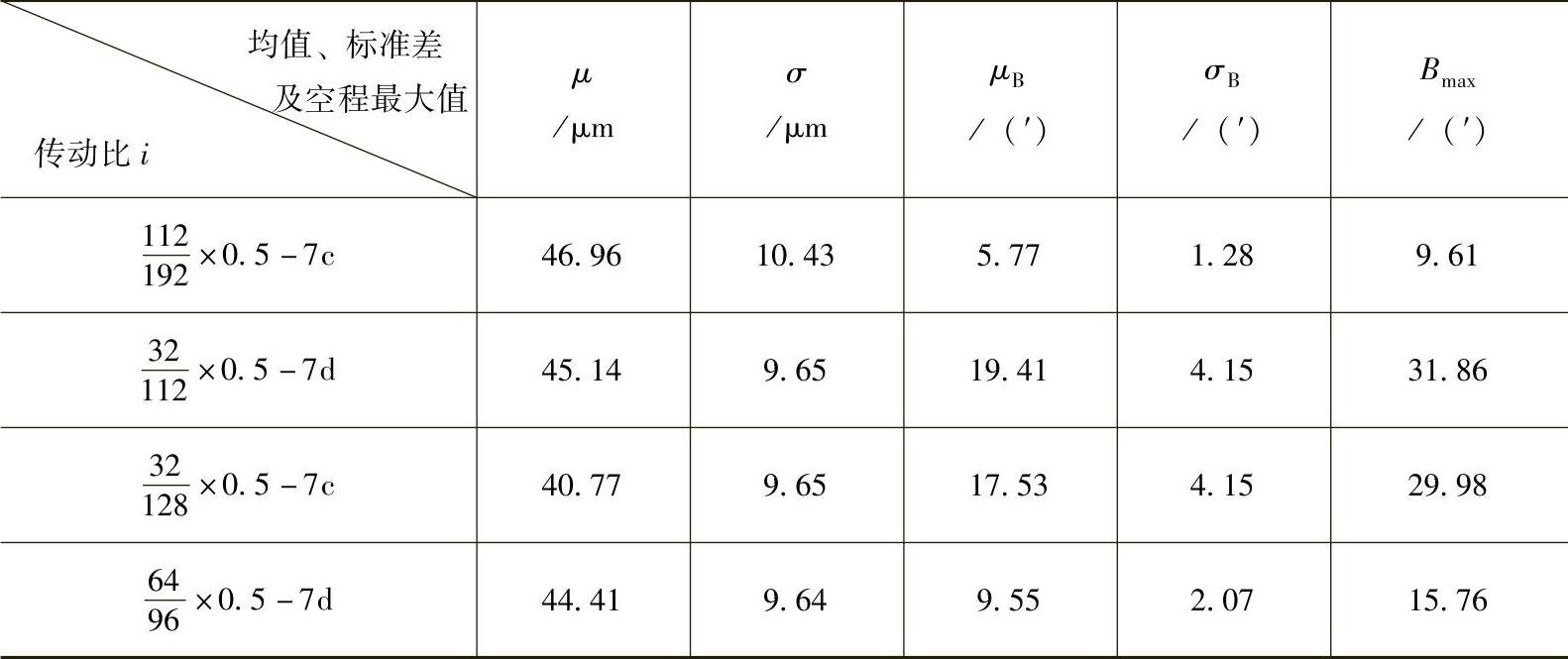
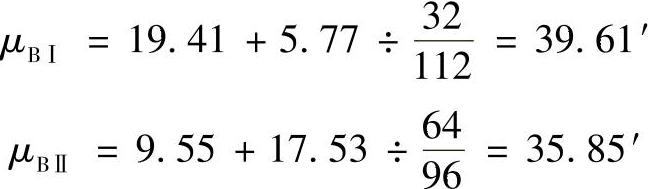
根据表13-74和前述公式可求得表13-75及表以下计算结果(μBⅠ、μBⅡ、μBⅠⅡ、σBⅠⅡ和BⅠⅡmax)。
表13 - 74 齿轮、轴、轴承、中心距极限偏差对应的精度等级公差、偏差 (单位:μm)
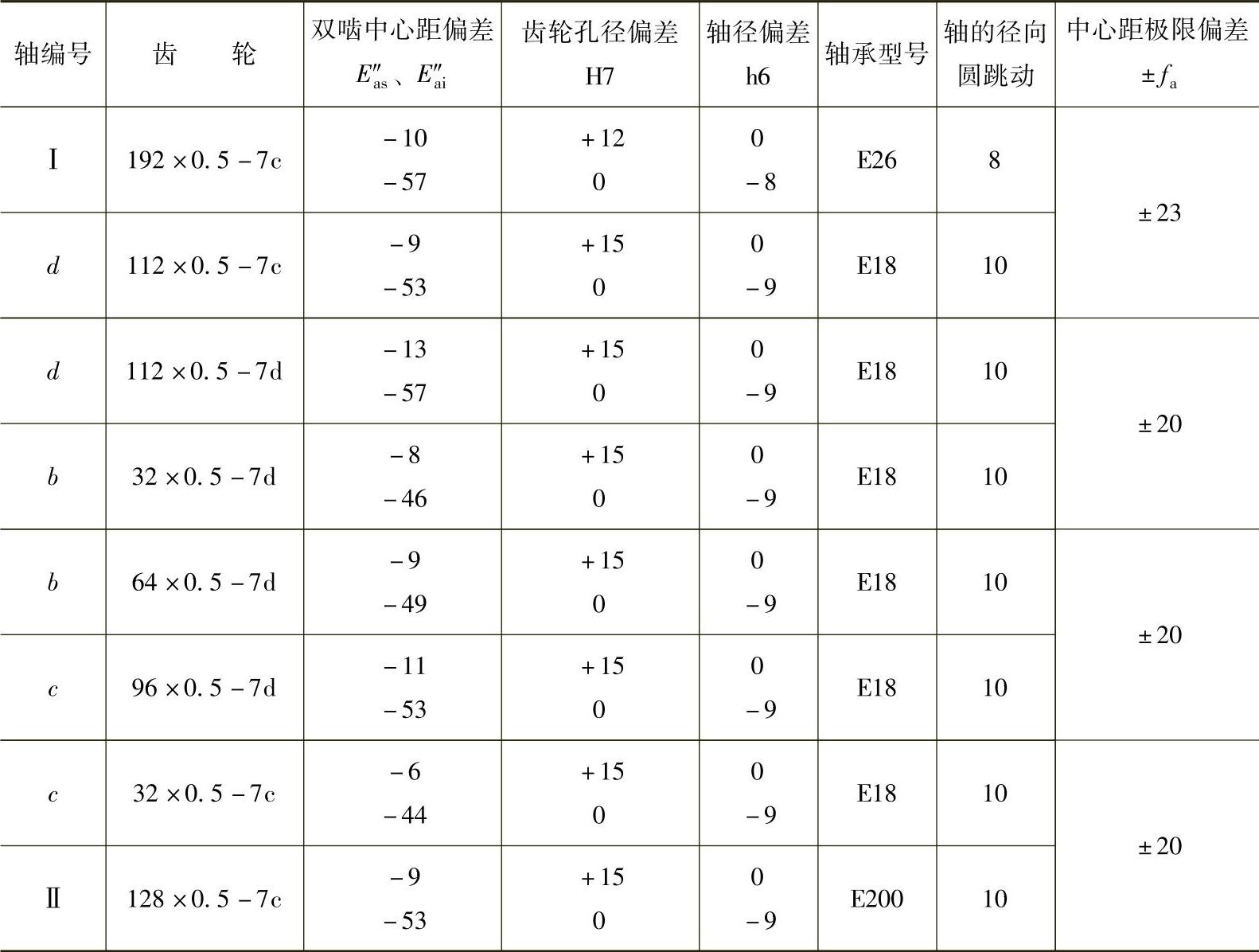
表13 - 75 μ、σ、μB、σB、Bmax的计算结果

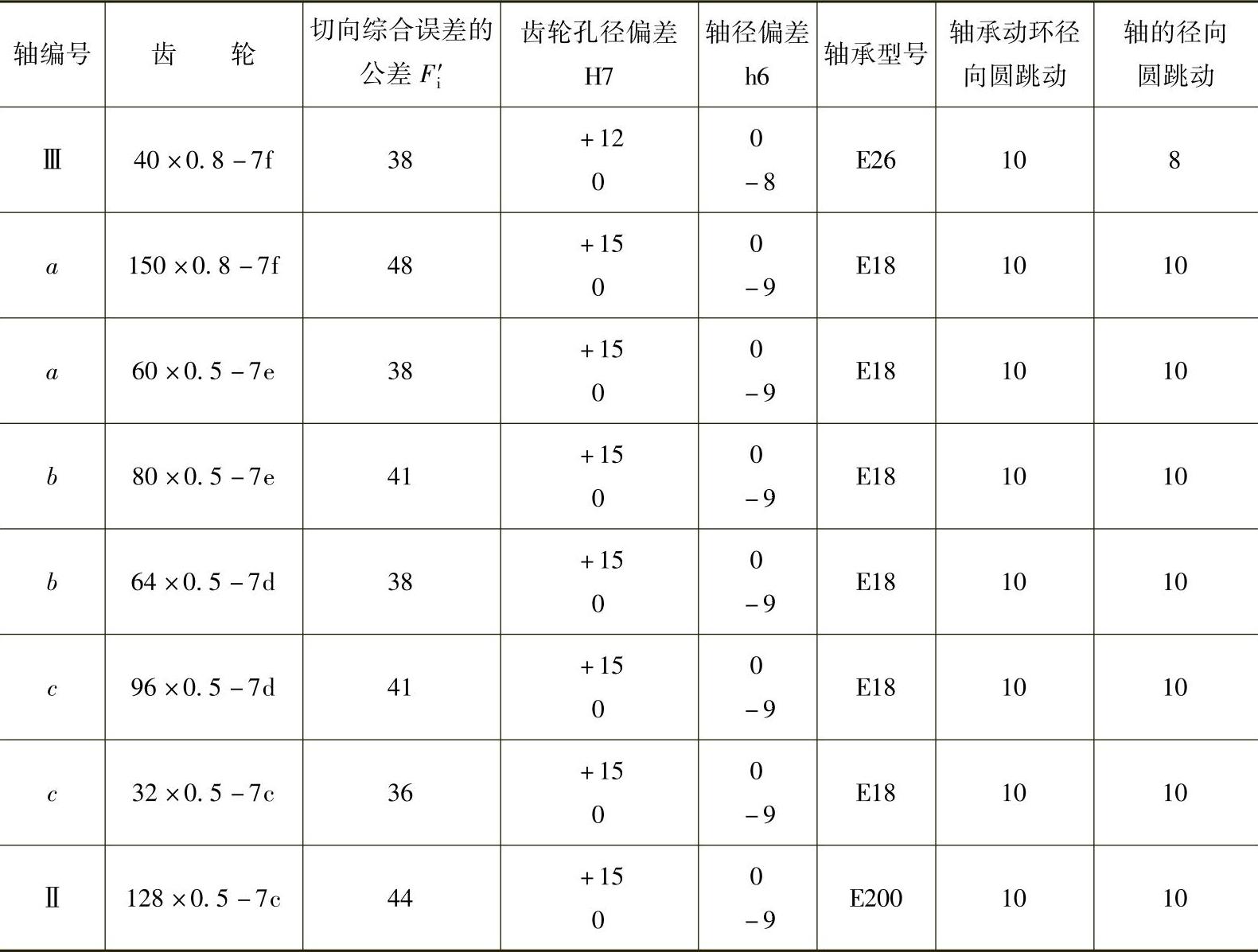
例13 - 4 计算图13-12中,从轴Ⅲ到轴Ⅱ的传动链传动误差值。
已知条件:轴承均采用E26、E18、E200型号,齿轮孔径公差为H7,轴径公差为h6,轴的径向圆跳动为7级。
解:将齿轮、轴承、轴、中心距极限偏差对应的公差等级公差、偏差数值查出,并列在表13-76内。
表13 - 76 齿轮、轴、轴承、中心距极限偏差对应的公差等级公差、偏差 (单位:μm)
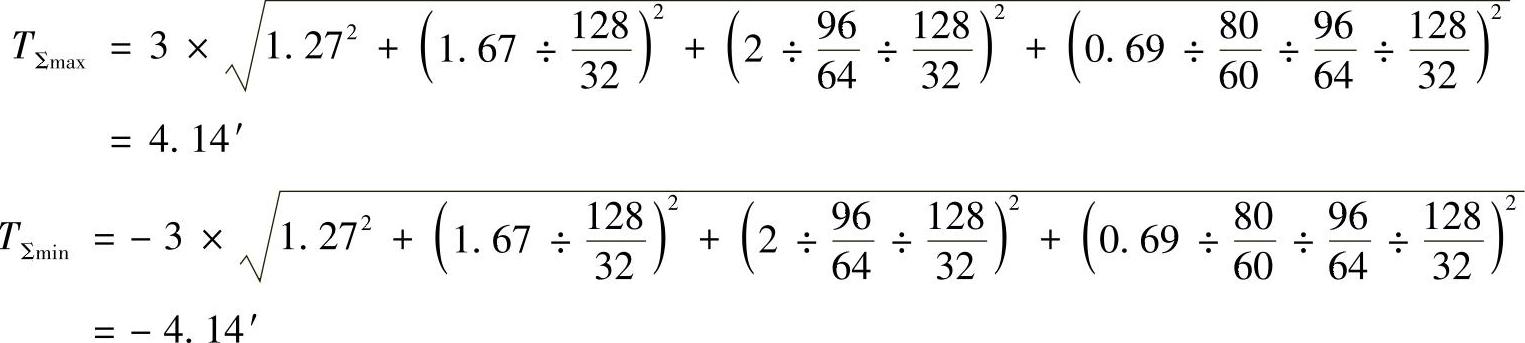
根据表13-76中数据和前述公式求出σT、Tmax、Tmin、(见表13-77)和TΣmax及TΣmin。
表13 - 77 σT、Tmax、Tmin计算数据

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







