(1)交错轴斜齿轮副的特点
1)交错轴斜齿轮副的啮合在理论上是点啮合,其仅适用于传递较小载荷和非读数传动。
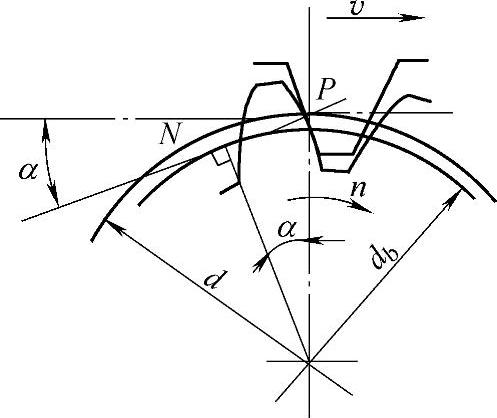
图13-1 齿轮与齿条传动
2)在多数情况下,一对齿轮副的齿向是相同的,但如果轴交角Σ很小时,则两齿轮的齿向也可以是不同的。
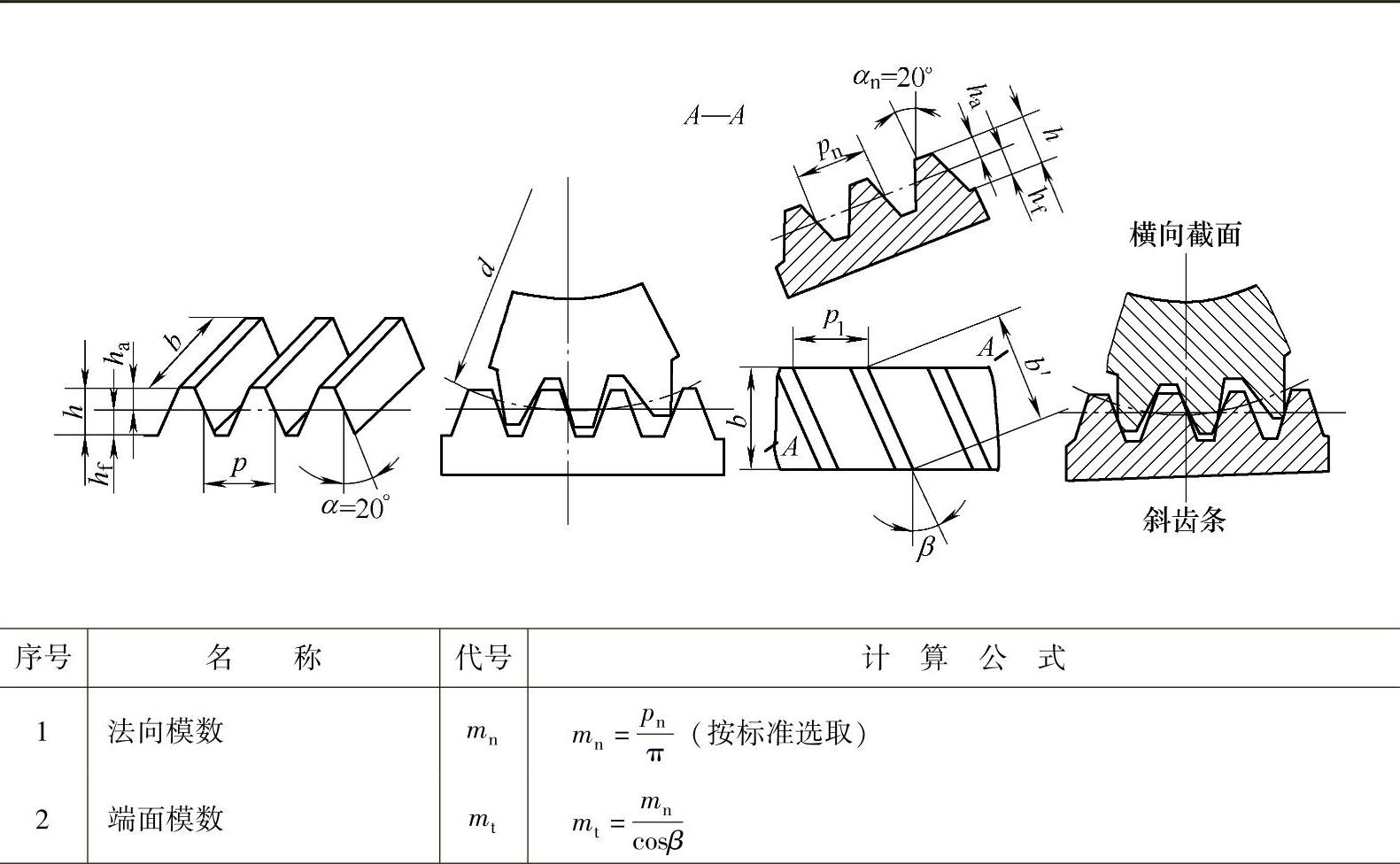
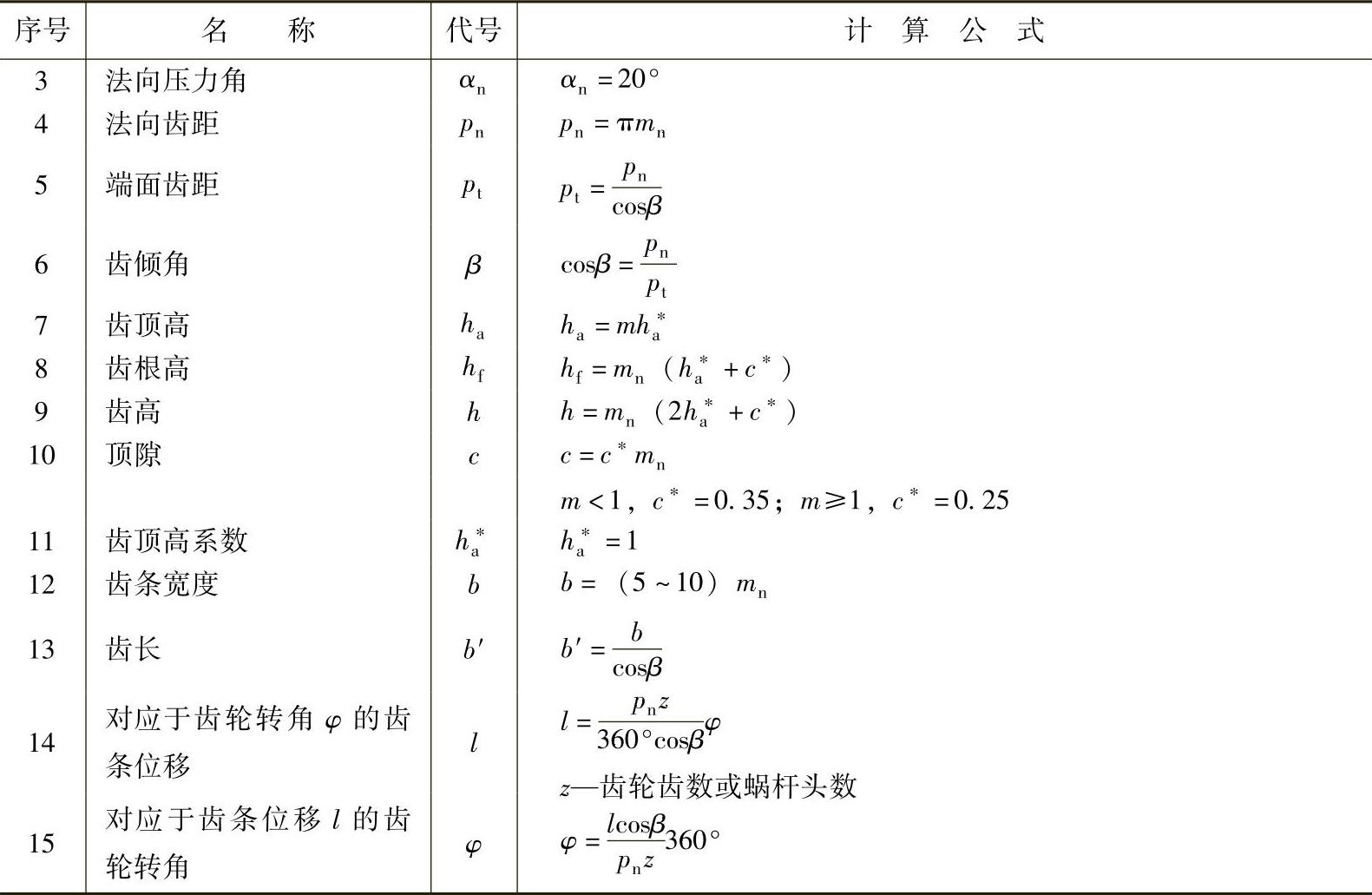
表13 - 10 齿条传动的几何计算
(续)
3)两个啮合齿轮的分度圆直径与齿数不成比例,但当齿轮的螺旋角相同时则例外。所以,一对齿轮副的齿数比不一定等于分度圆直径之比。通常表示齿数较少的齿轮,其分度圆直径为d1,有可能大于齿数较多的齿轮分度圆直径d2。
4)在轴交角Σ=90°、两齿轮的螺旋线方向相同时,主动轮的螺旋角β1应大于从动轮的螺旋角β2;在反向运动时,螺旋角应彼此相等,即β1=β2=45°。在Σ≠90°时,主动轮的螺旋角β1应大于从动轮的螺旋角β2,且在反向运动时,
5)在设计交错轴斜齿轮副时,应注意齿向和旋转方向(图13-2)。
6)在轴交角Σ=90°,而且具有相同齿轮直径的斜齿轮时,常用齿数比的斜齿轮螺旋角见表13-11。
表13 - 11 轴交角Σ=90°时相同齿轮直径斜齿轮的螺旋角
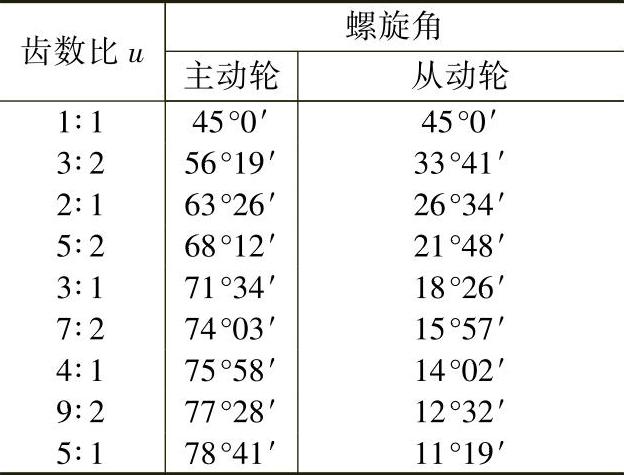
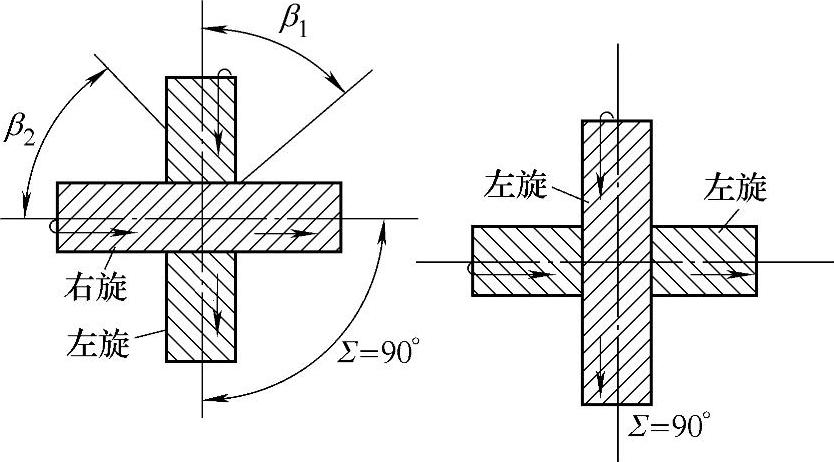
图13-2 轴交角Σ=90°时斜齿轮的齿向和旋转方向
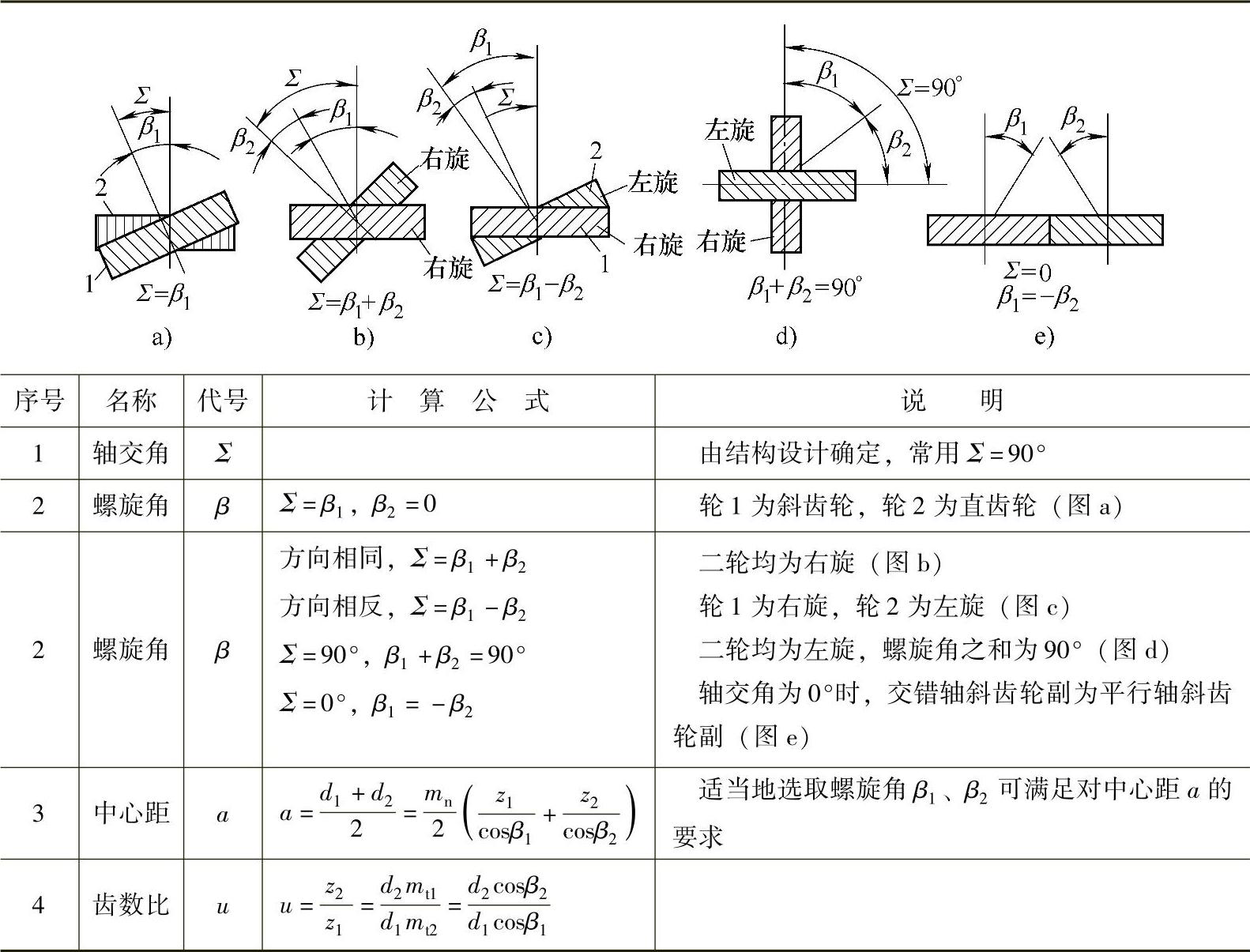
(2)交错轴斜齿轮副几何参数的基本关系(见表13-12)(https://www.daowen.com)
表13 - 12 交错轴斜齿轮副几何参数的基本关系
(3)交错轴斜齿轮副的各种情况的基本参数
1)已知轴交角Σ,无其他条件限制时,则按传动效率最高的条件选取β1和β2
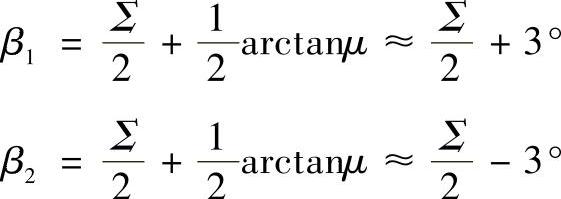
式中 μ——齿面的滑动摩擦因数。
2)已知轴交角Σ,若传动效率不是主要问题,而希望两齿轮直径相等,则

3)已知轴交角Σ和斜齿轮分度圆直径之比 ,则
,则

4)已知a的近似值和=t,则
将得z1和z2后化整,并保持 ,然后重新计算最终值d1、d2和a。
,然后重新计算最终值d1、d2和a。
5)已知Σ、mn、u、a,则选择z1、z2满足给定值u,并由下式求得螺旋角β1、β2。
交错轴斜齿轮副的单个斜齿轮的几何尺寸计算则与斜齿圆柱齿轮相同。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




