【摘要】:齿数zmin=17的直齿圆柱齿轮,不产生根切的最小变位系数为表13-3列出了设计少齿数变位齿轮时(m=1)需用的一些数据。根据两齿轮变位系数之和,一对啮合齿轮传动可分为下列三种类型:1)标准齿轮传动x1+x2=0,且x1=0、x2=0。2)高度变位齿轮传动x1+x2=0,且x1=-x2;对于内啮合传动,x1=x2,符号相同。3)角度变位齿轮传动x1+x2≠0。一般情况下,精密机械与精密仪器用的小模数齿轮传动,常常采用高度变位齿轮传动。高度变位圆柱齿轮传动的几何计算见表13-5。
1)避免根切,以得到少齿数的齿轮。齿数zmin=17的直齿圆柱齿轮,不产生根切的最小变位系数为

表13-3列出了设计少齿数变位齿轮时(m=1)需用的一些数据。
表13 - 3 避免根切的最小变位系数

(续)
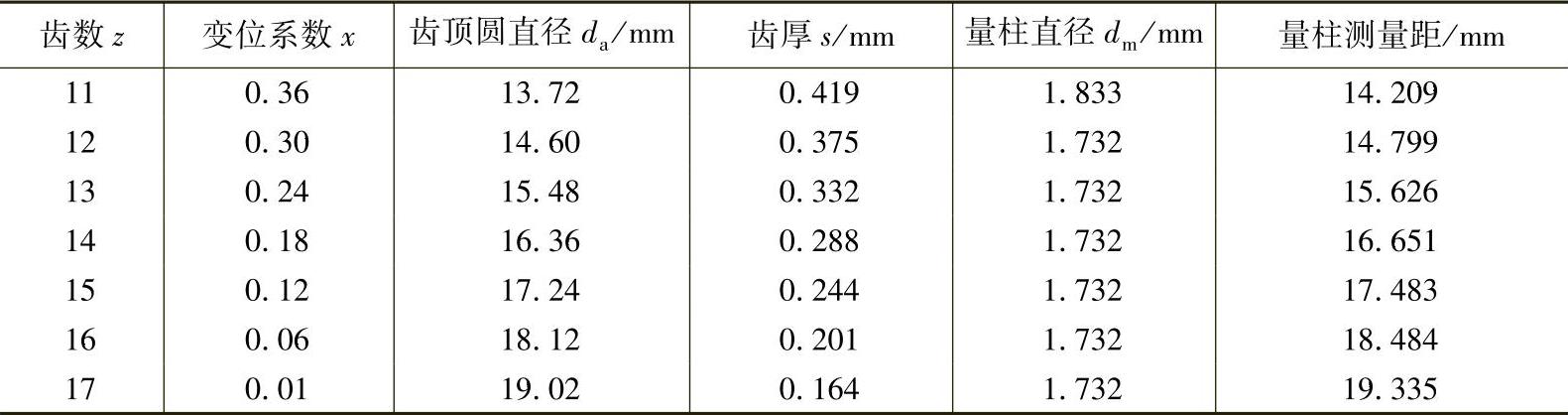
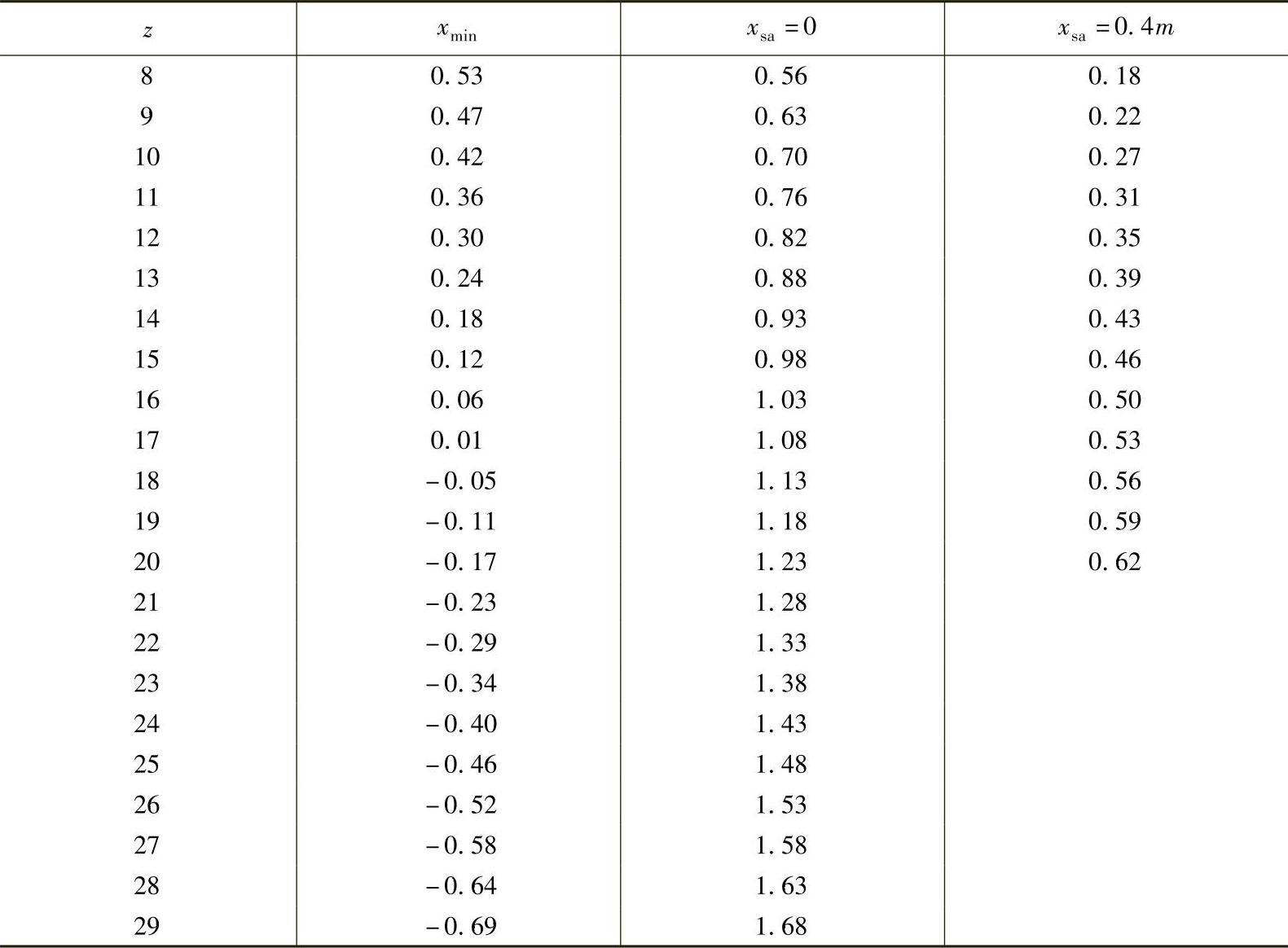
表13-4列出的xmin为不发生根切时的变位系数;xsa=0为齿顶变尖时的变位系数;xsa=0.4m为齿顶圆齿顶厚sa=0.4m时的变位系数。
表13 - 4 变位系数选择表
2)配凑中心距。
3)改善齿轮副的啮合性能。
4)修复旧齿轮。
根据两齿轮变位系数之和,一对啮合齿轮传动可分为下列三种类型:
1)标准齿轮传动x1+x2=0,且x1=0、x2=0。(https://www.daowen.com)
2)高度变位齿轮传动x1+x2=0,且x1=-x2;对于内啮合传动,x1=x2,符号相同。
3)角度变位齿轮传动x1+x2≠0。
一般情况下,精密机械与精密仪器用的小模数齿轮传动,常常采用高度变位齿轮传动。
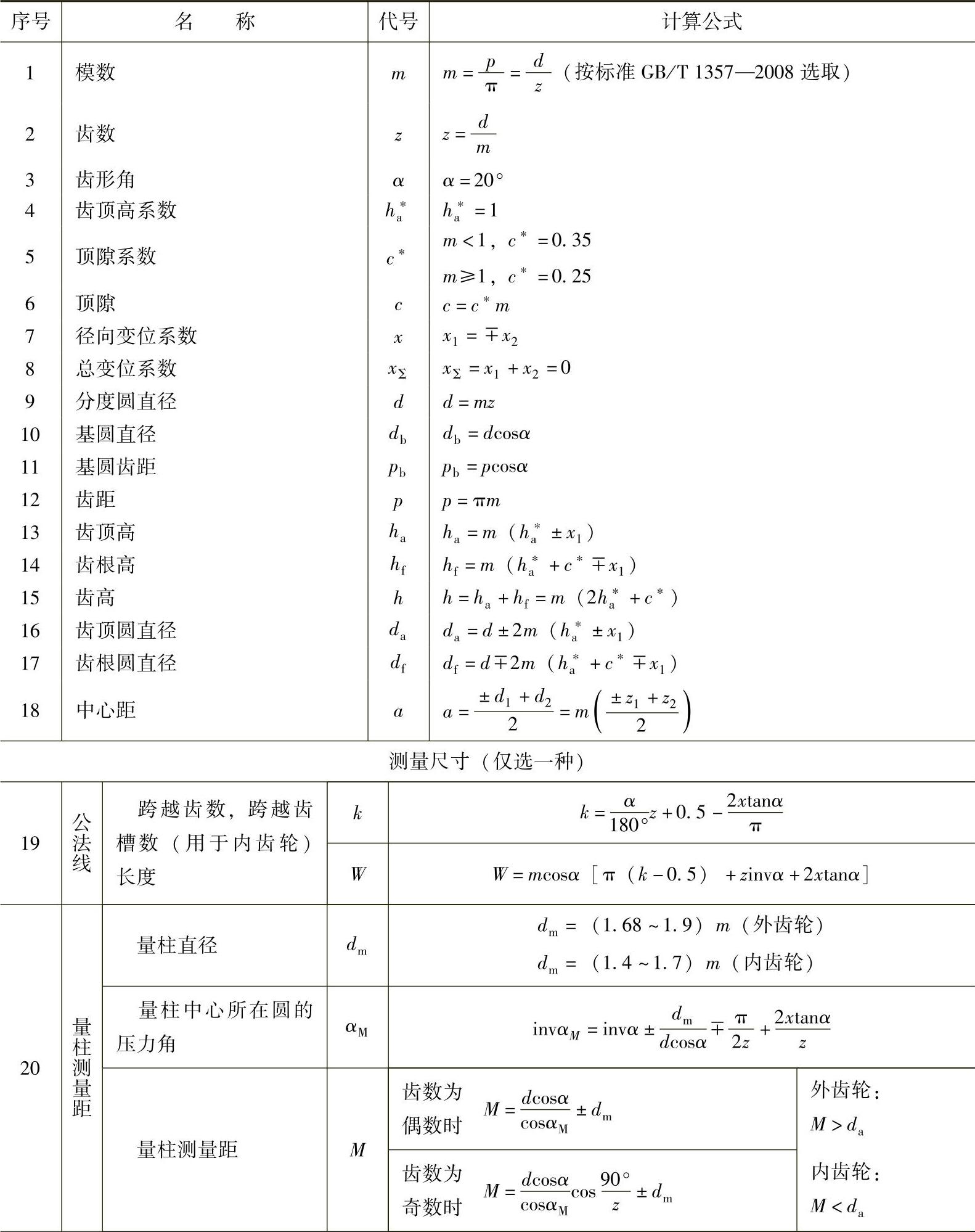
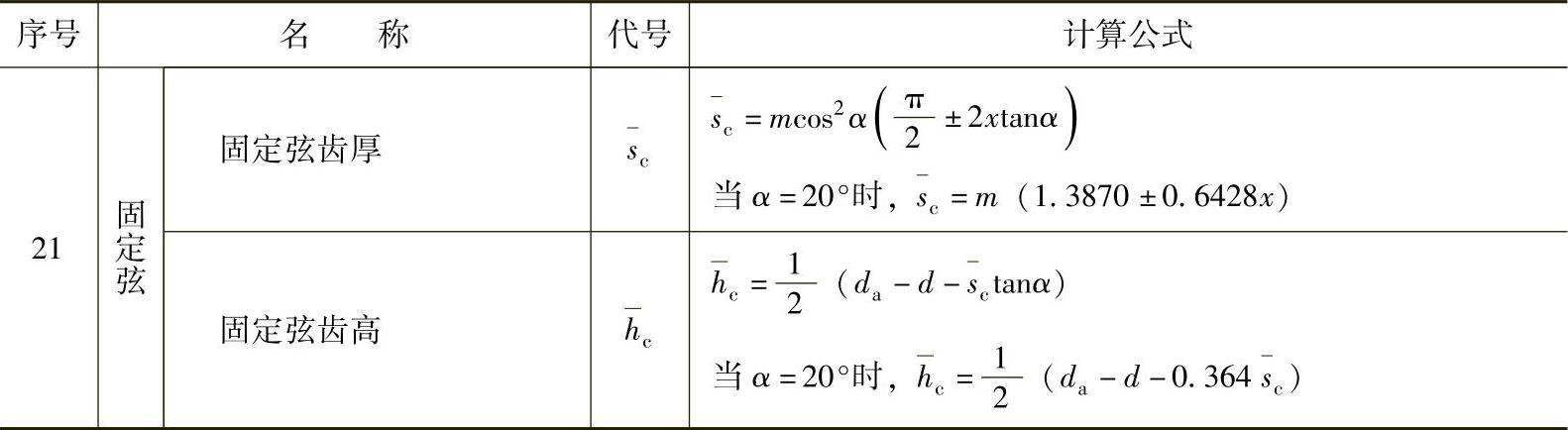
高度变位圆柱齿轮传动的几何计算见表13-5。
表13 - 5 高度变位圆柱齿轮传动的几何计算
(续)
注:小模数高度变位齿轮传动主要用于避免小齿轮的轮齿根切。
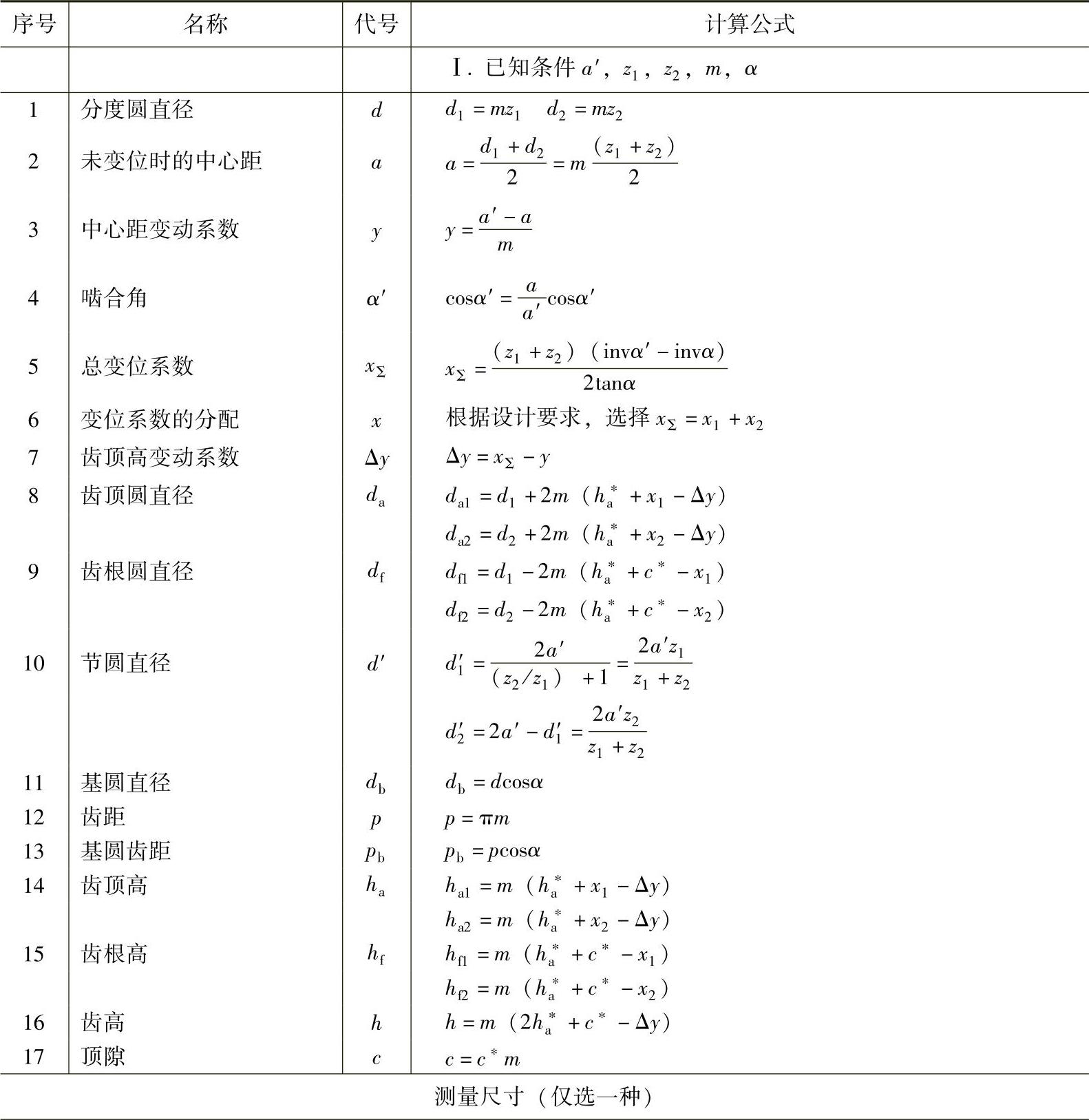
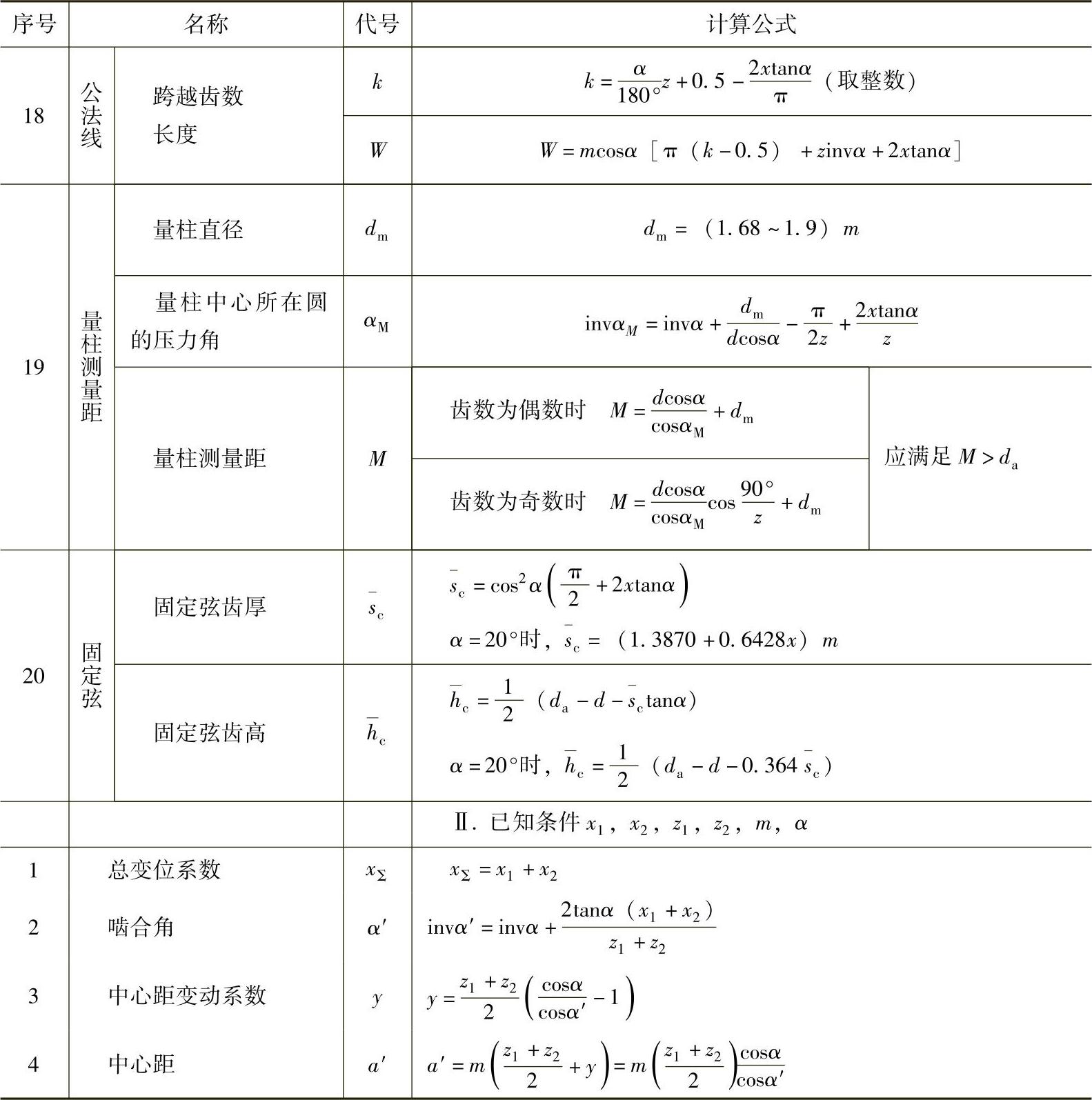
角度变位圆柱齿轮传动的几何计算见表13-6。
表13 - 6 外啮合角度变位圆柱齿轮传动的几何计算
(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




