机器人用高精度RV传动,有两项极严格的技术指标:一为运动精度(传动链精度)误差不能超过1′:一为间隙回差(Backlash),根据RV减速器的大小不同,规定不能超过1′~1.5′。此外,在负载运动情况下,包括弹性变形引起的回差在内的总回差不能超过6′。这就对摆线轮齿形优化修形方法和修形量提出相当严格的要求,摆线轮的优化新齿形必须:
1)满足多齿共轭啮合,而且有一定的径向间隙。如选用的等距与移距修形组合方法产生的齿形有一段与转角修形曲线吻合,即可达到多齿共轭啮合的要求,同时具有承载能力大、瞬时传动比恒定、运动精度高的特点。
2)应补偿(或减小)由于针齿销孔配合间隙等因素引起的较大侧隙,使总的综合回差相应减小。为此修形齿形曲线的工作段应拟合出一段负的转角修形曲线。
为达到上述特点,只有Δrrp<0和Δrp<0,即只有采用负等距与负移距修形组合加工摆线轮,才能使摆线轮修形产生负转角,同时具有一定的径向间隙。而采用正等距与正移距修形组合加工摆线轮,会使摆线轮的转角>0,也就不能补偿(或减小)由于针齿销孔配合间隙等因素引起的较大侧隙。因此,在机器人用RV传动中,为了满足小回差的要求,应当采用负等距与绝对值稍大一点的负移距修形组合加工摆线轮。
摆线轮齿形优化设计的数学模型和优化设计的方法步骤参照本章第6节(摆线轮齿形的优化设计),在式(11-78)中

所不同的是,其约束条件为
Δrrp<0
Δrp<0(www.daowen.com)
Δrrp-Δrp=Δj
按上面所述数学模型,通过计算机辅助设计,针对机器人用RV-250减速器,采用负等距与负移距优化修形组合优化设计出很理想的摆线轮的修形齿形曲线,如图11-52所示。由图11-52可以很明显地看出,此负等距与负移距修形组合所获得的摆线轮修形齿形之所以十分理想,在于它有如下重要特点:
1)连续光滑齿面上的BC段与转角修形量δ=-δc的转角修形齿形基本吻合,因此用这一段齿面工作时,接近理论共轭齿形啮合,既可以保证瞬时传动比恒定,又可保证接近理论上的同时多齿啮合条件,增大扭转刚度与承载能力。
2)通过负移距与负等距组合所得修形齿形在BC段与负的转角修形相吻合,它可以补偿(或减小)由于针齿销孔配合间隙等因素引起的较大回差,使总综合回差相应减小,这也是优化数学模型中的负等距与负移距修形组合的约束条件所起的作用。
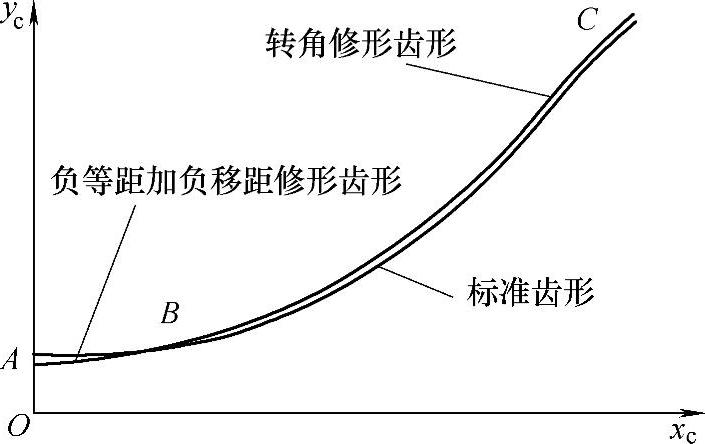
图11-52 负等距加负移距优化齿形
3)齿面上的AB段由B点显著地离开转角修形齿形,逐渐下凹至A点,这一段与图示的标准理论齿形有较均匀的间隙,且在A点的径向间隙大小Δj=Δrrp-Δrp,是可以用选定Δrrp-Δrp的数值来控制的,利用这一可控制的间隙,既可以补偿制造中径向尺寸链的误差,也可满足润滑对径向间隙的要求。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




