摆线针轮行星传动的针齿中心圆直径dp及外廓安装尺寸均已标准化,在这种情况下,能有效地影响传动承载能力的主要参数是偏心距a、针齿半径rrp,参数优化就是根据给定的dp,zp,zc,以减速器能承受的额定输出转矩T最大为目标函数,来优选a与rrp,即:
设计变量:X=[x1,x2]T=[a,rrp]T
目标函数:T(a*,r*rp)=maxT(a,rrp)
1)参数优化的约束条件的确定
①偏心距a约束条件:偏心距a应确保其短幅系数K1在合理的取值范围内,即
如第3节所述,K1的取值不同,摆线轮的齿形就不同,会影响摆线针轮传动的性能,是一个很重要的参数,其值既不能过大也不能过小。K1的比较合理的范围值可由表11-3来确定。
②针径系数的约束条件:针齿半径rrp的取值应满足避免针齿相碰及保证针齿和针齿壳强度两项要求,即rrp应确保其针径系数K2在合理的取值范围内
K2值的范围由表11-4来确定。
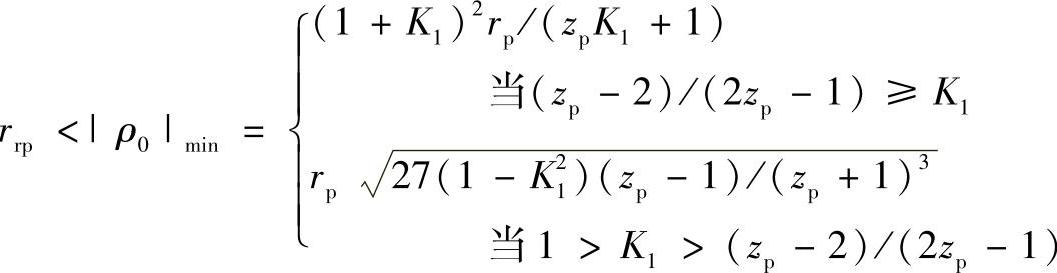
③针齿半径rrp的约束条件:针齿半径rrp的取值应满足摆线轮不产生顶切、尖点的要求,也就是rrp应小于摆线轮齿凸齿形部分的理论齿形最小曲率半径|ρ0|min。由2.4.1节内容可知:
④偏心距a的取值范围应符合摆线磨齿机的规范,即可选用的a(mm)值为0.65,0.75,1,1.25,1.5,2,2.5,3,3.5,4,4.5,5,5.5,6,6.5,7,8,9,10,11,12,13,14。
⑤针齿直径应取为整数,以便于系列化。
⑥摆线轮与针齿接触强度的约束条件:
摆线轮齿与针轮齿的最大接触应力根据式(11-70)为

式中各项符号的意义见本章5.1节。
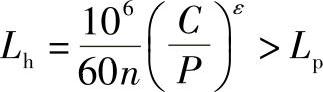
⑦转臂轴承的寿命Lh不小于许用值Lp
 (https://www.daowen.com)
(https://www.daowen.com)
式中各项符号的意义见本章第8节。
综上所述,得以下约束函数
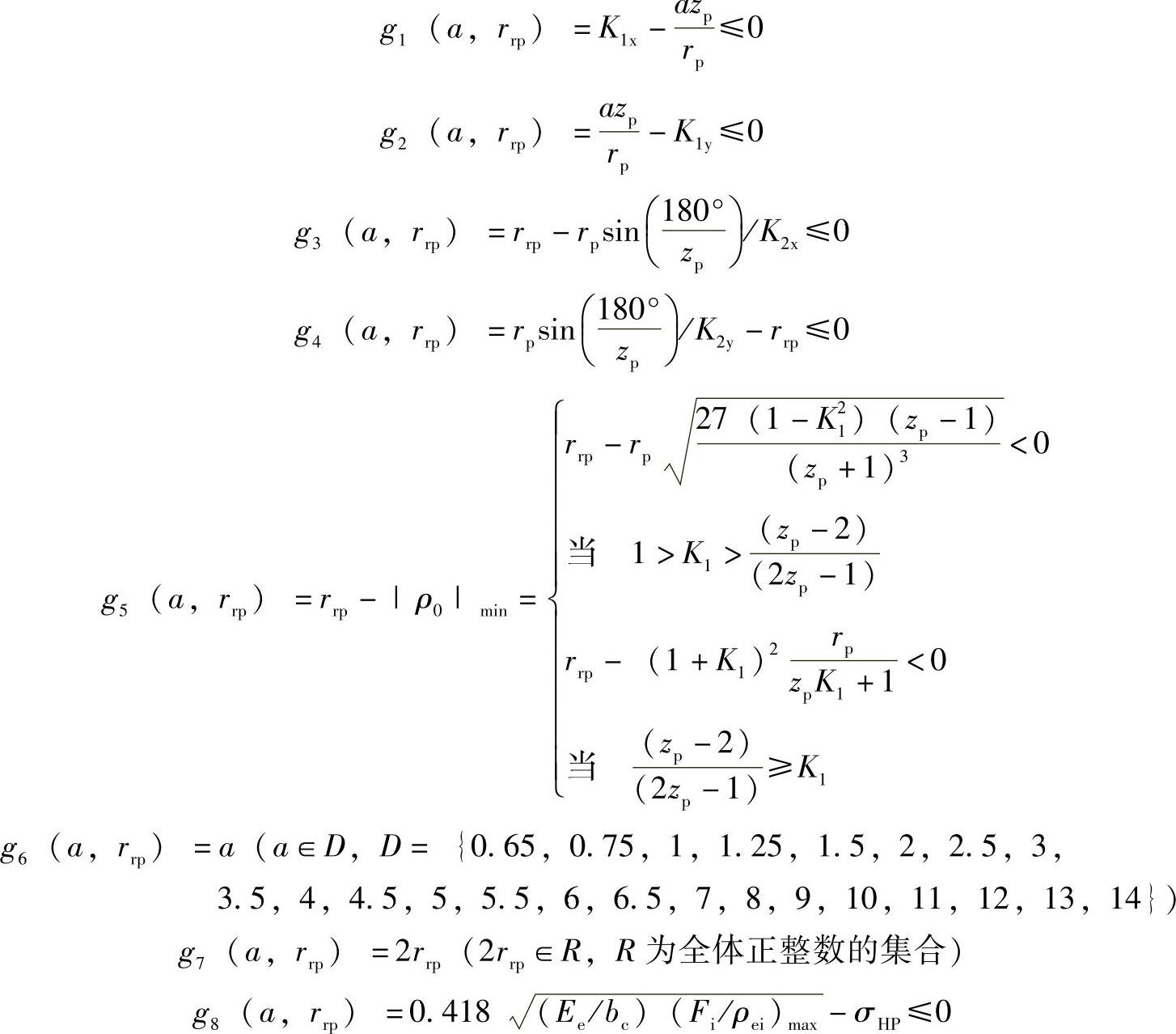
其中(Fi/ρei)max是x(a,rrp)的函数
g9(a,rrp)=Lp-〔106/(60n)〕(C/P)ε≤0
其中P是x(a,rrp)的函数。
2)参数优化过程 对摆线减速器的一般计算过程是:由减速器传递的额定转矩T确定各部分参数后,再计算针齿受力齿数及受力分布情况及轴承受力情况,得出强度、轴承寿命等项指标,再与许用值进行比较,检验是否合格。
但是参数优化中作为目标函数的T与设计变量a,rrp之间的函数关系较为复杂,无法用一个或多个简单明了的解析式来表达,因此可用下述方法处理:
①给目标函数T一个初始值T00,对满足前5项约束条件(即前7个约束函数)的点x(a,rrp),计算当输出转矩为T00时的强度和转臂轴承寿命。设约束条件中的第6项计算值为J1,许用值为A1,二者的比值为JA1,第7项的计算值为J2,许用值为A2,二者的比值为JA2。若在转矩为T00时,满足0.995≤(JAi)max≤1(i=1,2),则T00即为该点的目标函数值;若(JAi)max<0.995,则进行第2步;若(JAi)max>1则进行第3步。
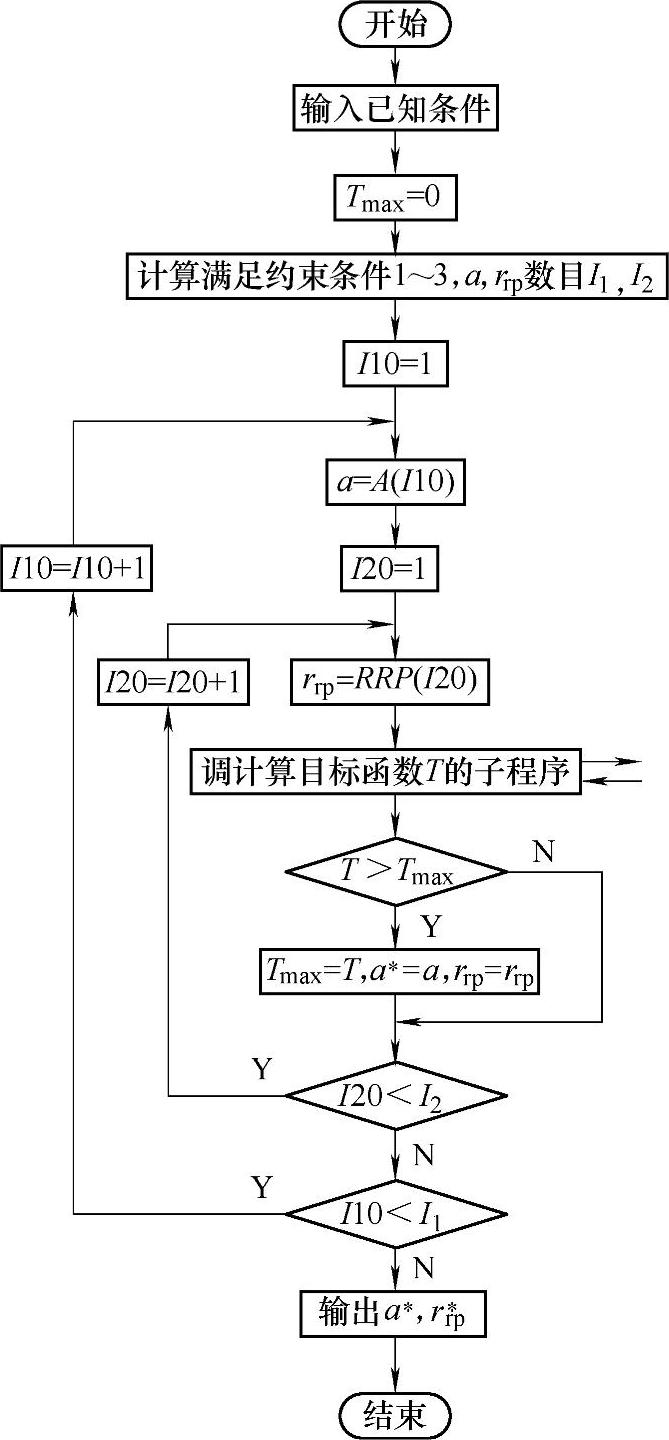
图11-38 a参数优化程序框图
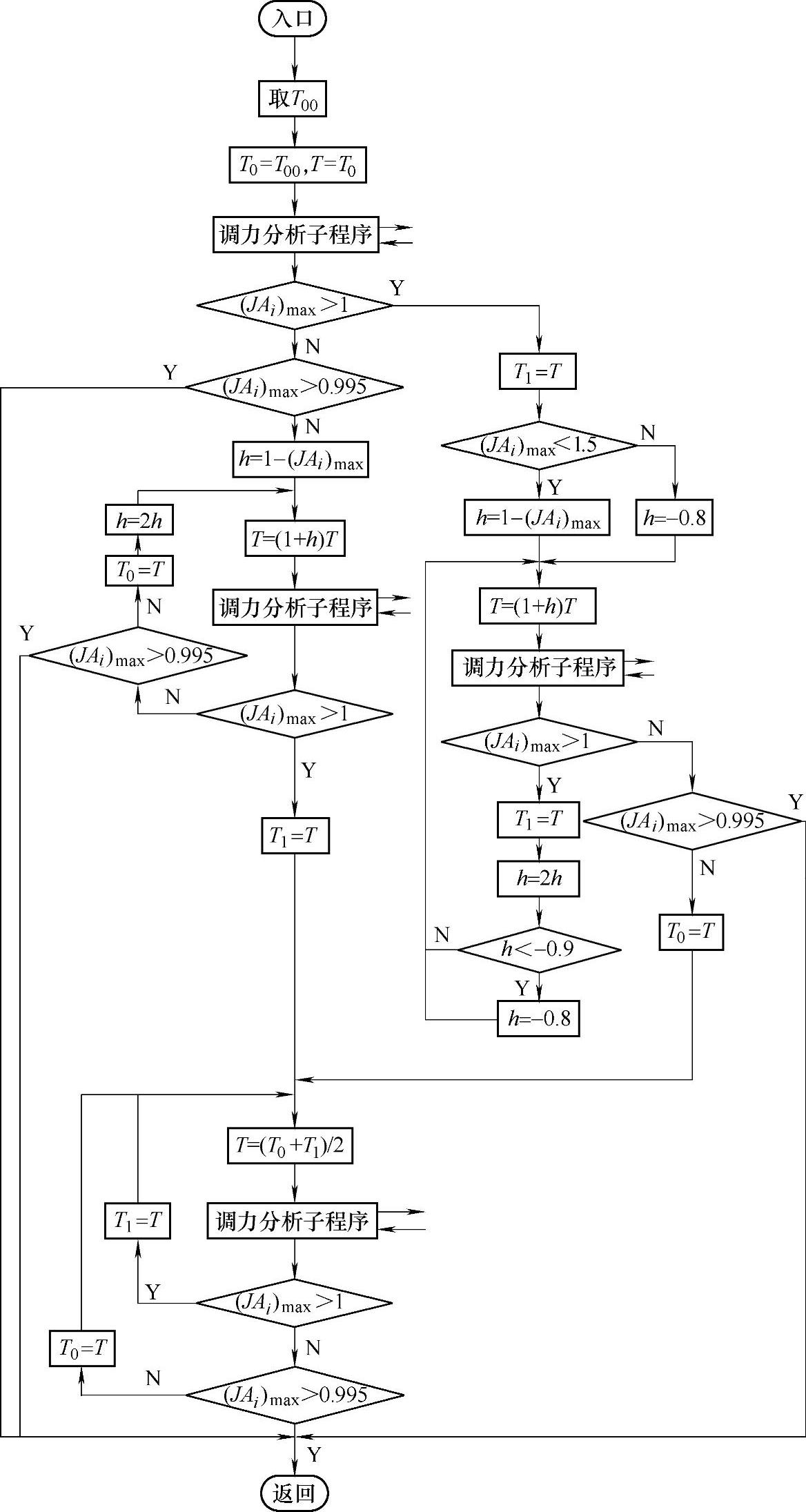
图11-38 b计算T子程序框图
②令T0=T00,取T=T0+h×T0(a式,h>0为步长)计算JAi,若(JAi)max仍小于0.995,则加大步长运用式(a)计算T,直到找出(JAi)max≥0.995时的T值,若0.995≤(JAi)max≤1,则该T值即为此点的目标函数值;若(JAi)max>1,则令T1=T,再进行第4步。
③令T1=T00,取T=T1-h×T1(b式,h>0为步长)计算JAi,若(JAi)max仍大于1,则加大步长运用式(b)计算T,直到找出(JAi)max≤1时的T值,若0.995≤(JAi)max≤1,则该T值即为此点的目标函数值;若(JAi)max<0.995,则令T0=T,再进行第4步。
④此时T0<T,T1>T(T为该点的实际目标函数值)。运用等分法,取T= [式(c)],计算(JAi)max,当(JAi)max<0.995时,取T0=T,再运用式(c);当(JAi)max>1时,取T1=T,再运用式(c),直至达到0.995≤(JAi)max≤1,此时的T即为该点的目标函数值。
[式(c)],计算(JAi)max,当(JAi)max<0.995时,取T0=T,再运用式(c);当(JAi)max>1时,取T1=T,再运用式(c),直至达到0.995≤(JAi)max≤1,此时的T即为该点的目标函数值。
程序框图见图11-38a。
计算目标函数T的子程序框图见图11-38b。
框图中力分析子程序的内容是,计算针齿受力齿数及受力分布情况,得出强度和轴承寿命等项指标,参考本章第4节。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






