【摘要】:摆线针轮行星传动的几何尺寸计算列于表11-5。表11 - 5 摆线针轮行星传动几何尺寸计算注:1.根据现有磨齿机的要求,a可采用:0.65,0.75,1,1.25,1.5,2,2.5,3,3.5,4,4.5,5,5.5,6,6.5,7,8,9,10,11,12,13,14。表11 - 6 各种机型号对应的针齿中心圆直径范围 表11 - 7 二齿差摆线针轮行星传动参数(续)
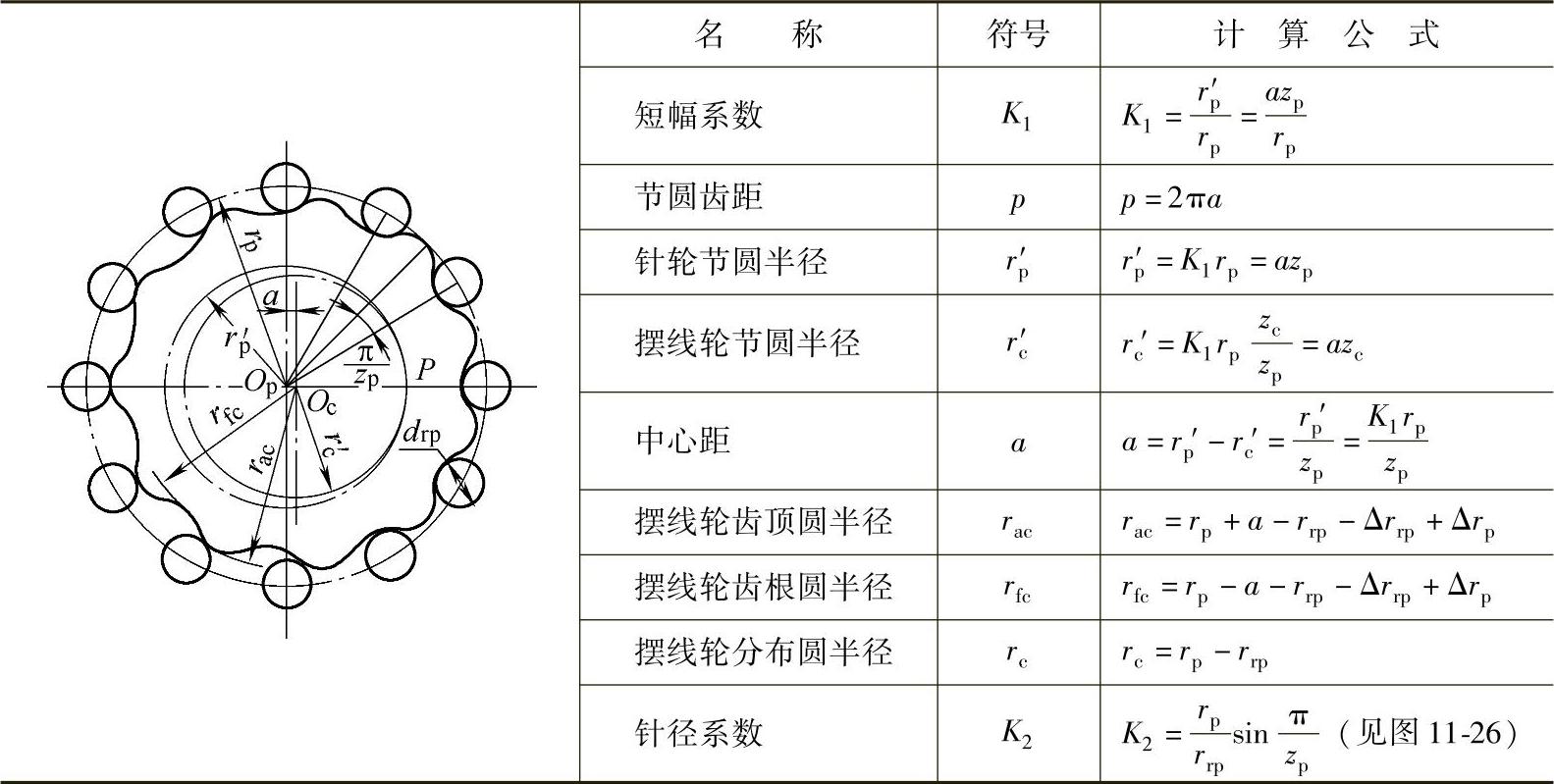
摆线针轮行星传动的几何尺寸计算列于表11-5。
摆线针轮减速器在我国按针齿中心圆(针轮分布圆)直径dp的大小分为13种机型,列于表11-6。摆线轮上理论齿廓的平均齿高所在的圆称摆线轮的分布圆,半径用rc表示。
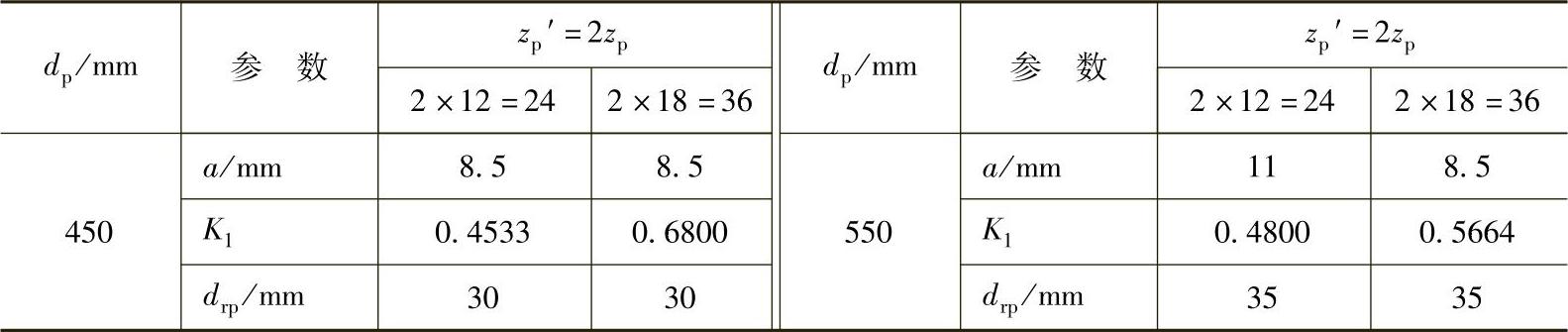
当传动比i≤17,为增加同时啮合受力齿数要采用二齿差摆线针轮行星传动时,参数a与drp应通过优化设计重新选取,表11-7为通过优化设计而推荐的二齿差摆线针轮行星传动的参数。
表11 - 5 摆线针轮行星传动几何尺寸计算
注:1.根据现有磨齿机的要求,a(mm)可采用:0.65,0.75,1,1.25,1.5,2,2.5,3,3.5,4,4.5,5,5.5,6,6.5,7,8,9,10,11,12,13,14。
2.对于二齿差传动,表中的zp=zp′/2(zp′为二齿差传动针轮的实际齿数);zc=zc′/2(zc′为二齿差传动摆线轮的实际齿数)。
3.表中摆线轮齿顶圆半径rac的计算公式仅适用于一齿差。对于二齿差传动,齿顶圆半径在修顶前接(https://www.daowen.com)
式(11-28)计算;在修顶后即为修顶摆线的齿顶圆半径rac2=rp2+a2-rrp2(式中,rp2、a2、rrp2均为修顶摆线的参数)。
表11 - 6 各种机型号对应的针齿中心圆直径范围 (单位:mm)

表11 - 7 二齿差摆线针轮行星传动参数

(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






