在图9-1a所示的3K型行星齿轮传动中,a、b、e为三个外伸轴,b为固定件,现在要求轮a主动,轮e从动时,轮系的效率ηbae。应用效率计算的普遍式(8-158),如果已知ηeab(将原式中的H改成e),ηbae就可求得。但在一般情况ηeab也是未知数,为此,对这种轮系应重新推导公式,与前述相同可写出
下面再分析对H作相对运动后,轮a、b和e三者传递的功率PHa、PbH及PHe间的关系。在新的转化机构中,H可看作固定件,但a、b、e中哪一个为主动件还要分析一下,与前相同,根据功率正、负来确定主、从动。若PHa>0,则在转化机构中轮a为主动,否则为从动。轮e也是这样,根据PHe的正、负来确定主、从动。如在转化机构中轮a、e主动,轮b从动,则
PaHηHab+PHe ηeHb+PHb=0
即
TanaHηHab+Te ηHe ηHeb+Tb nbH=0 (9-23)
联解式(9-20)、式(9-23),即可求得ηbae与ηbea同ηH的关系式。如在转化机构中,轮a、e从动,轮b为主动,则

然后联解式(9-19)、式(9-20)、式(9-21)和式(9-23)。轮a、b、e三者在转化机构中的主从关系,还可有其他各种形式,分析方法类同,这里的关键问题是如何确定轮a、b、e中哪个主动,哪个从动。而式(8-158)是通过iaHb的正、负来判定轮a的主、从动的,其中H是转化机构的固定件。现在类似地用iaHb和ieHb来判定H固定时轮a和轮e的主动、从动;若iaHb>0,则当固定件由b改变为H时,轮a不变其主从关系。反之,若iaHb<0,则轮a原先主动就变成从动,原先从动就变成主动。同理,若ieHb>0,则当固定件由b改变为H时,轮e不变其主从关系,反之就改变。
下面具体分析一下3K型行星齿轮传动的效率。
1)固定件db>de此时由于 ,
,
所以

若在行星轮系中,轮a主动,轮b从动,则在转化机构中轮a、e都变为主动,啮合功率的传递路线为
 ,从而得到式(9-23)。将其与式(9-20)和式(9-22)联解,可得
,从而得到式(9-23)。将其与式(9-20)和式(9-22)联解,可得

若在行星轮系中,轮e主动,轮a主动,则在转化机构中轮a、e都变为从动,啮合功率的传递路线为 ,从而得到式(9-24)。将其与式(9-21)和式(9-22)联解,可得
,从而得到式(9-24)。将其与式(9-21)和式(9-22)联解,可得

取ηbHe=ηHeb,ηbHa=ηHab,则式(9-25)、式(9-26)可写成统一式

当轮a主动时,β=1;轮a为从动时,β=-1。ηHab、ηHeb是H固定时转化机构变成一定轴轮系所对应的啮合效率。
2)固定件db<de此时,由于 ,
,
所以
若在行星轮系中轮a主动,轮e从动,则在转化机构中仍是轮a主动,轮e从动。至于轮b是主动还是从动,可用下面方法进行分析。回顾式(8-155)的分析过程,曾推得iaHb=PHa/Pba的关系,同样也可推得iaHb=PHa/Pba及ieHb=PHc/Pbc。由于iaHb<1,ieHb>1,所以PeH/Pbe>PHa/Pba。如果略去摩擦损失的话,Pbe=Pba,所以得PHe>PHa。这就是说在转化机构中,从动件轮e传递功率的绝对值要比主动件轮a传递功率的绝对值大。因此,轮b必定也是主动件,啮合功率传递为
 它们的关系为
它们的关系为
TanaHηHae+Tb nbH ηHbe+Te nHe=0
将上式与式(9-20)和式(9-22)联解,可得

若在行星轮系中,轮e主动,轮a从动,则在转化机构中仍是轮e主动,轮a从动。此时根据PHe>PHa,由于主动件轮e传递的功率大,故轮b必定为从动,啮合功率传递的路线变成 它们之间的关系为
它们之间的关系为
TanHa/ηHea+Tb nbH/ηHeb+TenHe=0
将上式与式(9-21)、式(9-22)联解,可得

取ηHeb=ηHbe,ηHea=ηHae,则式(9-28)和式(9-29)可统一为

以上将3K型行星齿轮传动的两个效率计算公式,式(9-27)、式(9-30),分别用于db>de和db<de的两种情况。
3)改变结构后 将图9-1a所示的3K型行星齿轮传动的结构改一下,即将其中轮a从轮b这一排移到轮e排上去,如图9-4所示,则由于
当db>de时ibHe>1;当db<de时,ibHe<1,所以
当db>de时,
当db<de时,
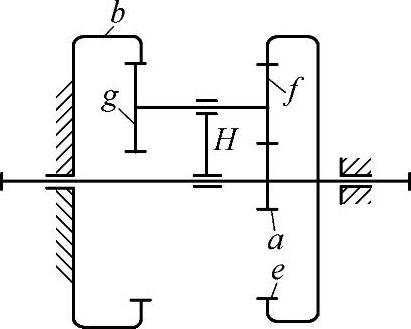
图9-4 3K(NGWN)型行星齿轮传动
因此,式(9-27)和式(9-30)两式同样适用,而不必像前苏联B.H.库特略夫采夫(B.H.Kудрявцев)那样用了8个公式计算3K型行星齿轮传动的效率,使人感到繁琐,而又不得要领。综上所述,可得到如下结论:3K型行星齿轮传动的效率计算,可以根据两个内齿轮固定的是大轮还是小轮而分别用式(9-27)或式(9-30)进行计算,不必考虑带外伸轴的小齿轮位于哪一排。
4)下面论述几个问题3K型行星轮系的效率可否像运动分析那样拆成两个部分计算?两个内齿轮中要固定一个,究竟固定大的好还是固定小的好?小齿轮a究竟放在b排好还是放在e排好?即图9-1a与图9-5哪一种结构好?我们将逐个论述这些问题。(www.daowen.com)
3K型行星轮系可以变成两个2K-H型串联的行星轮系,其传动比不变,如图9-1a所示的轮系可用图9-5所示的轮系来代替,则
至于效率是否也可以这样代替,而写成
回答是要看一下固定的内齿轮b是大轮还是小轮,如果d′b>d′e,则上述的式子是成立的,否则就不成立,也就是说不能代替。国内外有些资料,对这个问题的论述是错误的,在前苏联库氏的1977年版《行星齿轮传动手册》中,也没有明确指出这个问题。要证明这一点也不难,因为前面已经分析了这两种情况。首先当db>de,啮合功率是在a、b与e、b之间传递,这与图9-5的情况是吻合的。通过图9-5所示轮系的效率计算,也证明某结果与式(9-26)相同。但是,当db<de时,啮合功率是在a、e与b、e之间传递,a、b之间没有直接关系,因此与图9-5就不一致。通过具体的效率计算也可得到证明,这里不作详细论证。于是,可得如下结论:
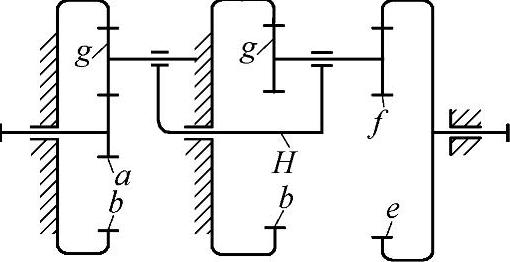
图9-5 把图9-1a 3K型分解为两个2K-H型的串联
3K型行星轮系的效率计算,当大内齿轮固定时与传动比计算一样,可用两个串联的2K-H型行星轮系来代替;如果固定的是小内齿轮,则这样计算是错误的。
对于3K型行星轮系,一般用于传动比较大处,希望效率也较高。当db>de时,轮b固定和轮e固定两种轮系的效率关系,可应用效率普遍式来表达如下:
而ibae=ibaHihHe=(1-iHab)(1-ieHb)。由前面分析可知,当db>de时,iHab<0,ieHb<0,所以ibae>1,iaeb>0。于是当a主动时,β=+1,γ=+1;a从动时,β=-1,γ=-1。
所以
或

此外
ibae=1-ieab=1+iaeb (因为ieab=1-ibae<0)。所以,3K型行星轮系当大内齿轮固定时不仅传动比大,而且效率也比小内齿轮固定时高。
再对比一下图9-1a和图9-4所示的两种结构究竟哪一种好?即轮a放在b排上好还是e排上好?首先从传动比来看,用齿数来表达

这里为了便于比较,令两种结构的a、b、e都相同,f、g就不能相同,为此将图9-4中的f与g改成f′与g′。从上面公式很难看出图9-1a与图9-4两种结构哪一种传动比ibae较大。如果采用图解法,当给出相同的转速na时,在对应的啮合点上具有相同的速度vA和ve,如图9-6所示(其中图9-6a即为图9-1a,图9-6b即为图9-4)。从而可以看出ne也必相同(两者的 、
、 及
及 距离都相同),所以ibae或ibea也是相同的。从轮齿的强度来看,两者外啮合齿轮副的接触强度不同。图9-6b中的a与f′比图9-6a中的a与g的中心距要小;而外啮合齿轮副恰恰是轮系中的薄弱环节,所以图9-6a即图9-1a结构的接触强度较好。
距离都相同),所以ibae或ibea也是相同的。从轮齿的强度来看,两者外啮合齿轮副的接触强度不同。图9-6b中的a与f′比图9-6a中的a与g的中心距要小;而外啮合齿轮副恰恰是轮系中的薄弱环节,所以图9-6a即图9-1a结构的接触强度较好。
另外更重要的一点是图9-6b即图9-6结构的效率较低。其原因是负号机构与正号机构两部分传动比的分配不同,虽然两者的总传动比ibae一样,但图9-6b的负号机构部分传动比下降,这对效率影响不大,而正号机构部分传动比增加引起效率下降,故图9-4是一种不妥当的设计。下面举一实例可以看得更清楚。
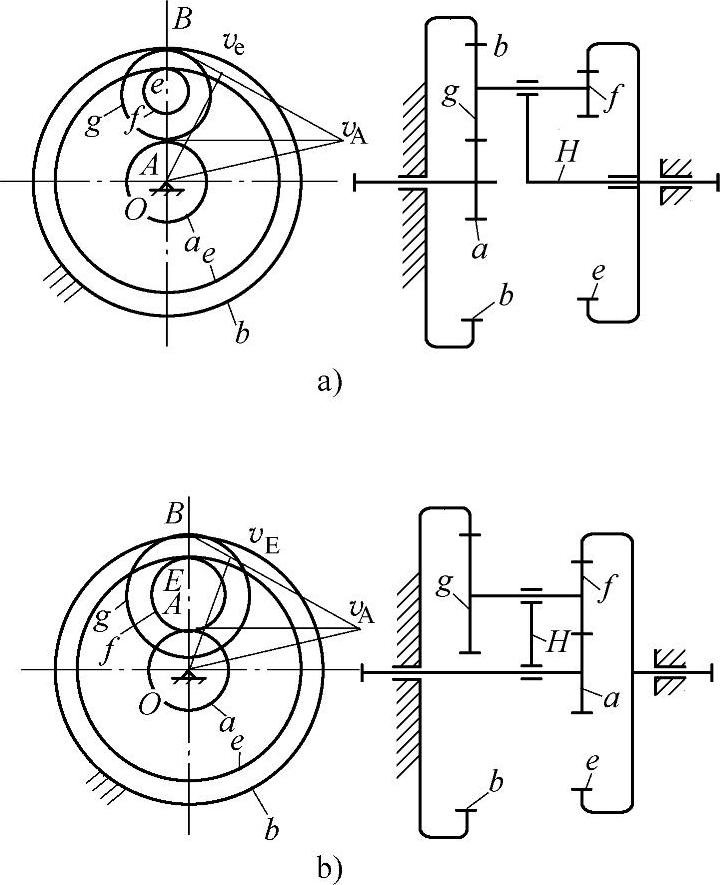
图9-6 3K型行星传动的变换
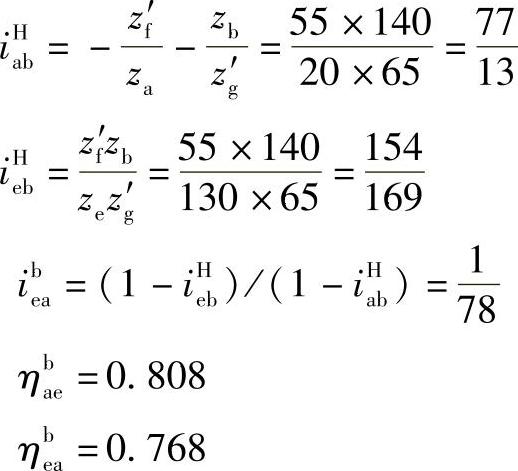
例9-4 已知3K型行星轮系za=20,zb=140,ze=130,zf=50,zg=60,根据两排齿轮的同心条件,可以求得zf′=55,zg′=65,取ηHab=0.97,ηeHb=0.98。试确定传动效率ηbae和ηbea。
解 当轮a与b同排时,
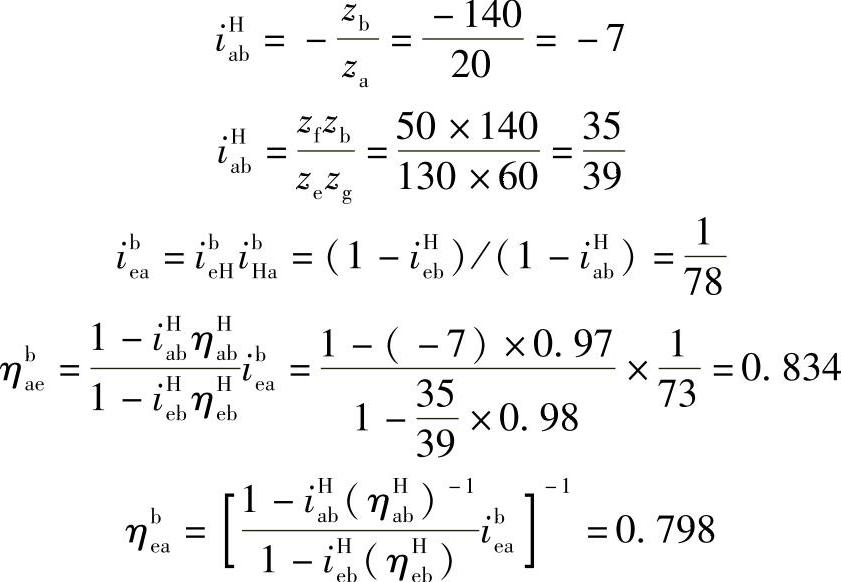
当轮a与e同排时,
于是,得出如下两个结论:
①3K型行星轮系中,有三个外伸轴的齿轮a、b、e的大小如果保持不变,轮a与轮b同一排或者与轮e同一排,不影响轮系的传动比。
②3K型行星轮系的轮a建议放在固定的大内齿轮的同一排,这样在相同传动比的条件下,可获得较高的强度及较高的效率。
通常在估算或方案设计时,3K型行星传动的效率可直接从图9-7所示的线图查得。
应用实例:试确定i=154的3K型行星传动的效率。
根据表9-3得zf=42,由图中查得ηbae=0.78。
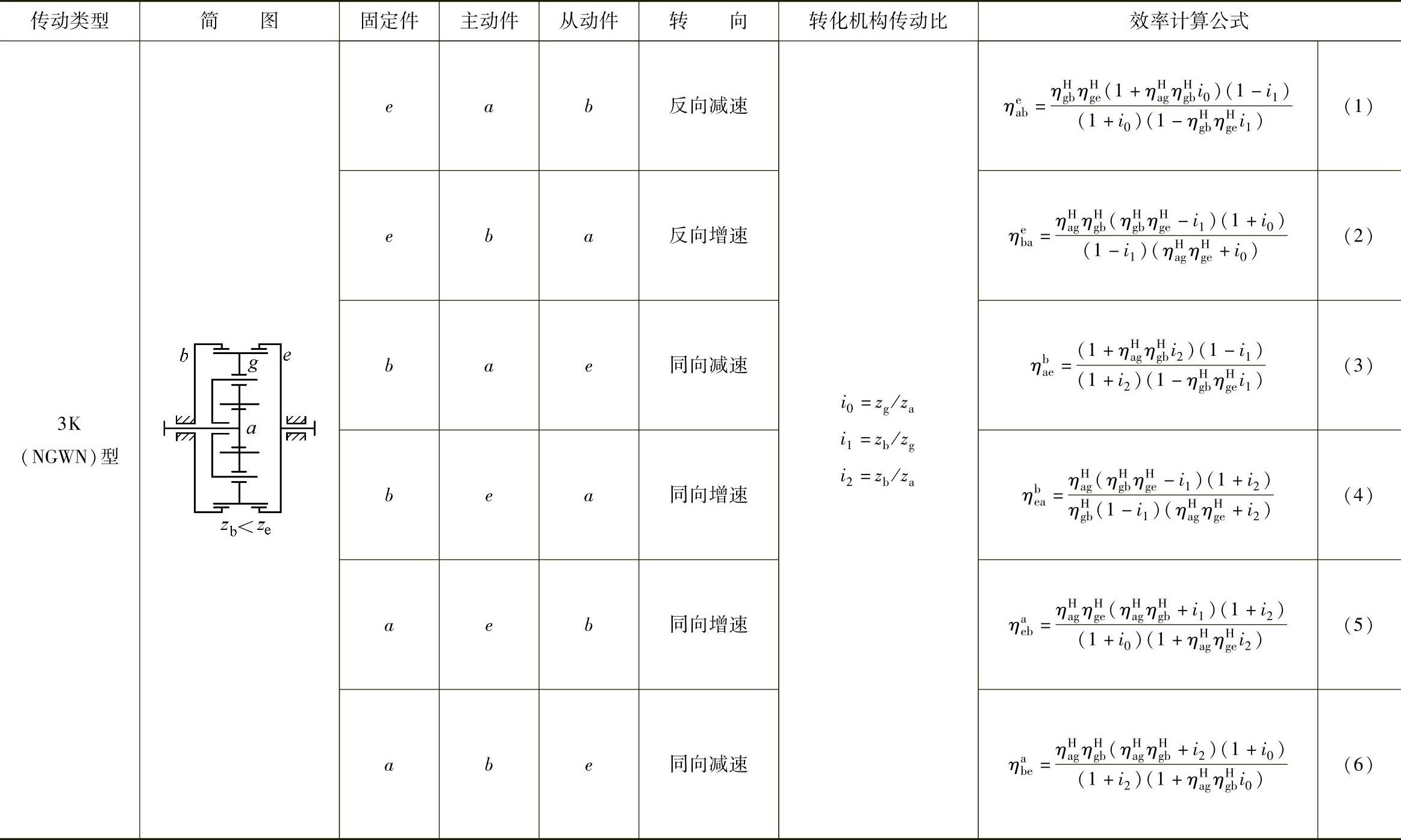
对于3K型不同传动简图的效率计算式见表9-6。特殊3K型行星齿轮传动效率计算式见表9-7。
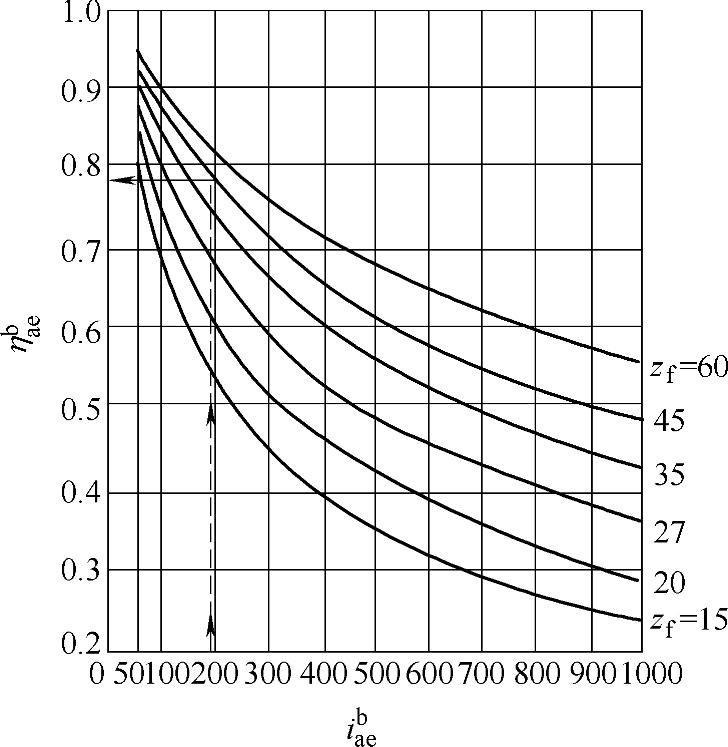
图9-7 当啮合中的摩擦因数μ=0.12和行星轮滚动轴承中的当量摩擦因数μT=0.006时,3K型(按简图9-1a设计的)行星减速器的效率
表9-6 3K(NGWN)型行星传动效率计算式
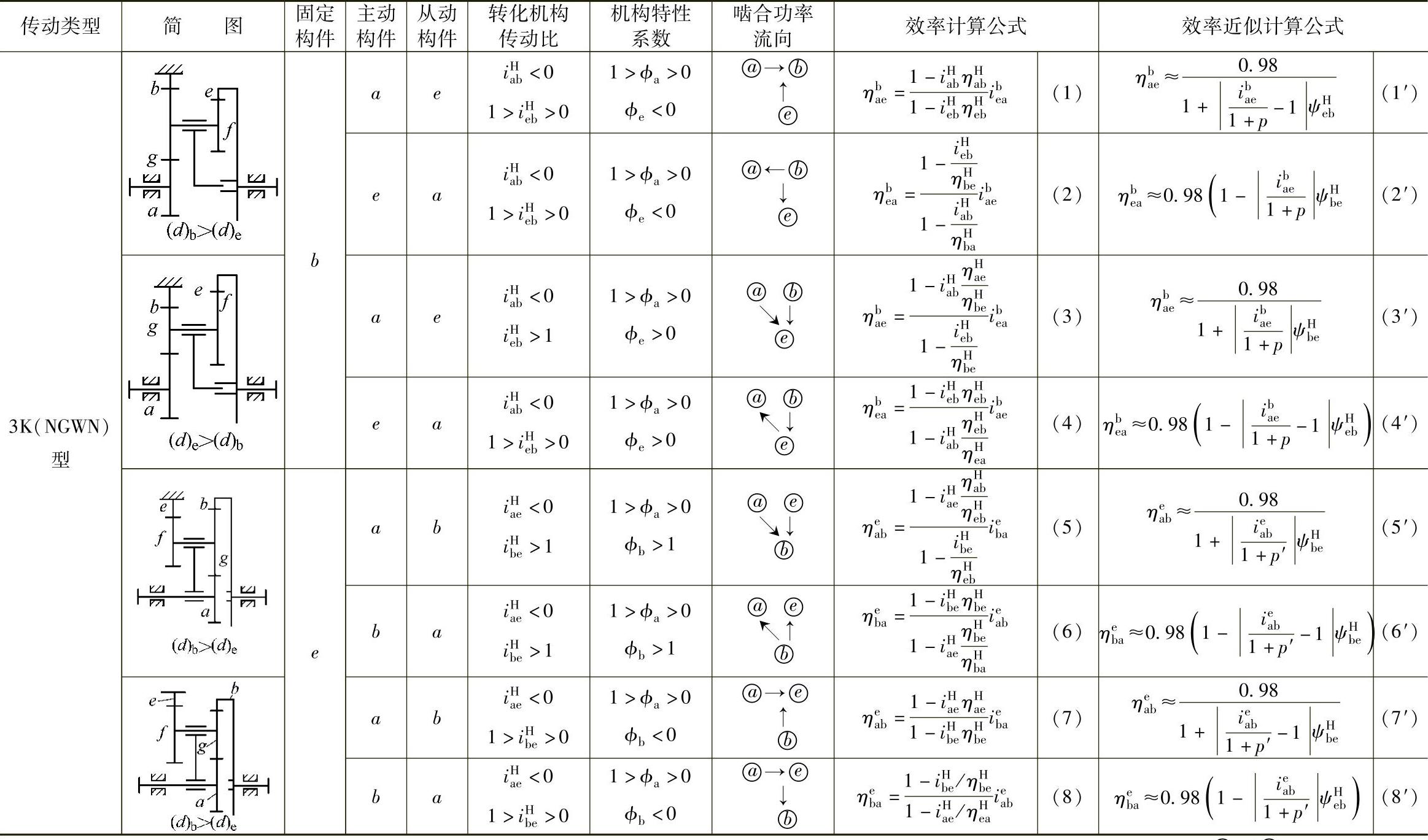
注:表中p=zb/za,p′=zgze/zazf,ψH=1-ηH,ϕa=NbH/Na,ϕb=NHb/Nb,ϕe=NHe/Ne,ψHbe=ψHgb+ψfHe。→表示啮合功率流向。例 表示啮合功率由构件a、e输入,并列流向构件b输出。(d)b、(d)e表示齿轮b和e的分度圆直径。
表示啮合功率由构件a、e输入,并列流向构件b输出。(d)b、(d)e表示齿轮b和e的分度圆直径。
表9-7 特殊3K(NGWN)型行星传动的效率计算式
注:ηaH-g、ηHg-b、ηHg-e为转化机构各对齿轮啮合的效率。在计算传动效率时,理应考虑轴承效率,但因该种传动通常均用滚动轴承,其损失较啮合损失小得多,将其忽略对效率影响不大。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






