图8-84所示为一行星差动轮系,a、b和H是三个外伸轴,将其中一轴(如b或H)固定,便得到一行星轮系或定轴轮系。另外两轴间的传动效率可用如下公式表示:
(1)b固定时
当a主动时,轮系的效率为
当a从动时,轮系的效率为
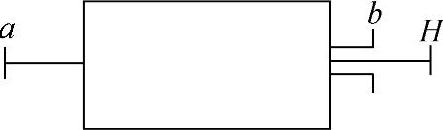
图8-84 行星差动轮系
式中,Pba、PbH分别为a轴和H轴在b轴固定时传递的功率。上面两式可统一表示为

式中 β——当a主动时,β=+1,当a从动时,β=-1;
Ta、TH——a、H轴传递的转矩;
nba、nbH——b固定时,a、H的转速;ibHa——b固定时,H、a间的传动比,或当b未作固定时,对b作相对运动时H、a间的传动比。同理iaHb为a固定或对a作相对运动时H、b间的传动比。ibHa与iaHb的关系为ibHa=1-iaHb。
(2)H固定时
当a主动时,轮系的效率为 。
。
当a从动时,轮系的效率为ηbHa=-PHa/PbH。
式中,PHa、PHb分别为a轴和b轴在H轴固定时传递的功率。上面两式可统一表示为

式中 γ——当a主动时,γ=+1,当a从动时,γ=-1;
Tb——b轴传递的转矩;(https://www.daowen.com)
nHa、nbH——H固定也即对H作相对运动时a、b的转速;
iHba——H固定或对H作相对运动时b、a间的传动比。
此外,根据轮系受力的平衡条件,其三个外伸轴a、b和H传递的转矩必须满足
Ta+Tb+TH=0 (8-154)
联立解式(8-152)、式(8-153)和式(8-154)可得
(ηb)β=1-iaHb[1-(ηH)γ]
因为β=±1, ,所以
,所以
ηb={1-iaHb[1-(ηH)γ]}β (8-155)
这里,b一般可作为实际行星轮系的固定件,而H为其转化机构的固定件。当b固定、a主动时,β=+1,a从动时,β=-1;当H固定、a主动时,γ=+1,a从动时,γ=-1。
式(8-155)表达了当b、H分别固定时,得到的两轮系的效率ηb与ηH间的关系普遍式。式中β的正、负根据实际轮系a是否主动来判定(即按啮合功率流的方向来判定),但γ的正、负要根据转化机构中a是否主动来定。必须指出:一个轮系加上一个公共转速而改变了固定件时,原来的主动件不一定还是主动。因为
若iaHb>0时,则PHa与Pba符号相同,说明改变固定件(由b→H)时,a不变其主、从关系。
若iaHb<0时,则PHa与Pba符号相反,说明改变固定件(由b→H)时,a改变了其主、从关系。因此,根据iaHb的正、负可判定γ的正、负。它共有四种可能:
b固定时a主动,而iaHb>0,则H固定时a仍为主动,此时β=+1,γ=+1。
b固定时a主动,而iaHb<0,则H固定时a变为从动,此时β=+1,γ=-1。
b固定时a从动,而iaHb>0,则H固定时a仍为从动,此时β=-1,γ=-1。
b固定时a从动,而iaHb<0,则H固定时a变主动,此时β=-1,γ=+1。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





