NGW型行星轮系配齿数,首先根据原始参数查表8-4,确定行星轮个数np。当np与ibaH的关系满足邻接条件(表8-4)的要求时,配齿数仅根据传动比、同心条件和装配条件这三方面约束条件进行。本节介绍三种配齿数的方法。
(1)第Ⅰ种方法——满足精确传动比的要求
根据三个约束条件的第Ⅰ种表达式,合并成一个非角度变位齿轮传动时的总配齿公式

式中各项齿数均应为正整数,其传动比ibaH最好用分数式表示。对角度变位齿轮传动,一般也可以先按式(8-30)配齿总公式先进行配齿,再将行星轮齿数zg减少1~2齿,然后进行角度变位的参数计算。
例8-10 图8-2所示的50t氧气转炉倾动机构中的NGW型差动轮系,已知ibaH=5.333,np=4,试对该轮进行齿数选配。
解 1)验算邻接条件根据ibaH=5.333及np=4,查表8-4得,按邻接条件容许最大传动比(ibaH)max=5.77,可见ibaH=5.333是满足邻接条件的。
2)把已知参数代入总配齿公式
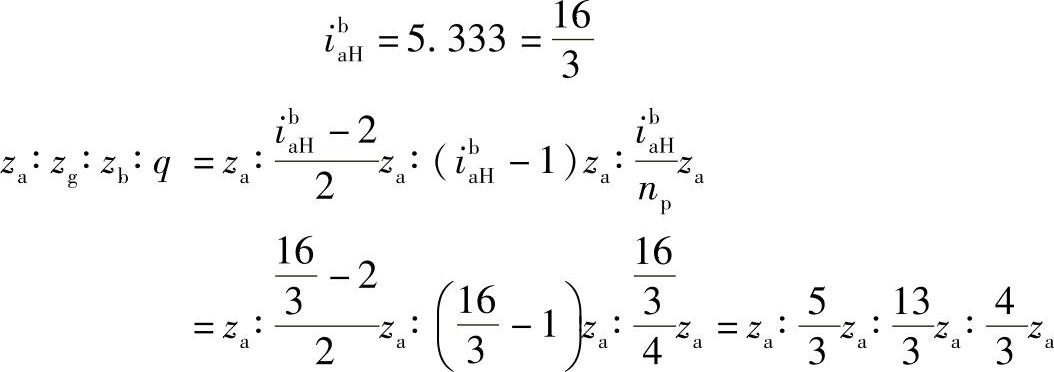
可见,当za为3的倍数,如za=15,18,21,24,…,就可以使总配齿公式各项均为正整数。
3)确定各轮齿数。该设计综合考虑强度及传动平稳性条件等,取za=24,因而计算得
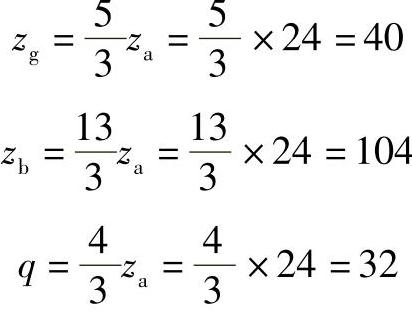
结果:非角度变位齿轮传动的配齿数za=24,zg=40,zb=104
对角度变位齿轮传动,该设计将行星轮齿数减少一个齿,因而得
za=24,zg=39,zb=104
(2)第Ⅱ种方法——适用于普通行星轮系的简便方法
一般动力传动行星轮系,对传动比并不要求很精确,略有变化影响不大,根据这个灵活性,应用上述配齿的约束条件第Ⅱ种表达式,可得到这种简便配齿方法。
传动比ibaH;要求非角度变位或角度变位齿轮传动。
步骤:
1)根据ibaH按邻接条件查表8-4及结构设计要求,确定行星轮个数np。
2)根据强度及传动平稳性等条件,预先确定太阳轮齿数za。
3)凑x值,根据下列三方面凑定x值:
①x=ibaHza——传动比条件。
②x应为np的倍数——装配条件。
③x应为偶数——非角度变位的同心条件,对角度变位齿轮传动,可不受此“偶数”条件的限制。
4)计算内齿圈及行星轮的齿数
zb=x-za
对非角度变位齿轮传动,
或
对角度变位齿轮传动,
式中,Δzg由角度变位要求确定。
行星轮齿数减少值Δzg,既可以为整数,也可以为非整数。(https://www.daowen.com)
(3)第Ⅲ种方法——适用于系列设计的配齿数
在NGW型行星轮系系列设计中,一般其主要参数如传动比ibaH、模数m、公称中心距a、齿数和zΣ均需按优先系数预先排好系列。设计时,其模数应与系列要求模数完全一致,其他参数如传动比ibaH、中心距a、齿数和zΣ应尽量接近系列规定的公称值,但允许有些波动。在系列设计中,对同一机座号中,在某一传动比范围内,其模数m、中心距a、齿数和zΣ采用一样。可见,对这一段传动比范围内的不同传动比的配齿数,其齿数和zΣ成为已知参数。对这种配齿数方法,如前所述表达式不难找出其配齿数方法。
配齿数的已知条件为:
公称齿数和zΣ、传动比ibaH,行星轮个数np以及是否角度变位等。
步骤:
1)根据约束条件,校核确定的齿数和zΣ。
满足装配条件:2zΣ应该为np的倍数。
满足同心条件:对非角度变位传动,2zΣ应为偶数。对角度变位齿轮传动,2zΣ可以不满足偶数的要求。在角度变位传动要求Δzg已事先确定了,当Δzg为整数时,则要求2zΣ应为偶数;Δzg为非整数时,则要求2zΣ应为奇数。
2)计算齿数
对非角度变位传动:zg=zΣ-za。
对角度变位传动:zg=zΣ-za-Δzg。
由于设2zΣ=x,因而第Ⅲ种方法,同样能像第Ⅱ种方法那样进行配齿数,简述如下:
原始参数:ibaH,是否要求角度变位。
步骤:
①根据ibaH按邻接条件查表8-4及结构设计要求,确定行星轮个数np。
②初步确定太阳轮齿数za。关于确定太阳轮齿数za,通常推荐如下:
行星轮系的小齿轮(当ibaH>4时,太阳轮为小齿轮;当ibaH≤4时,行星轮为小齿轮)的最小齿数z1min为:软齿面(≤350HBW)推荐z1min=17;硬齿面(>350HBW)推荐z1min≥12。
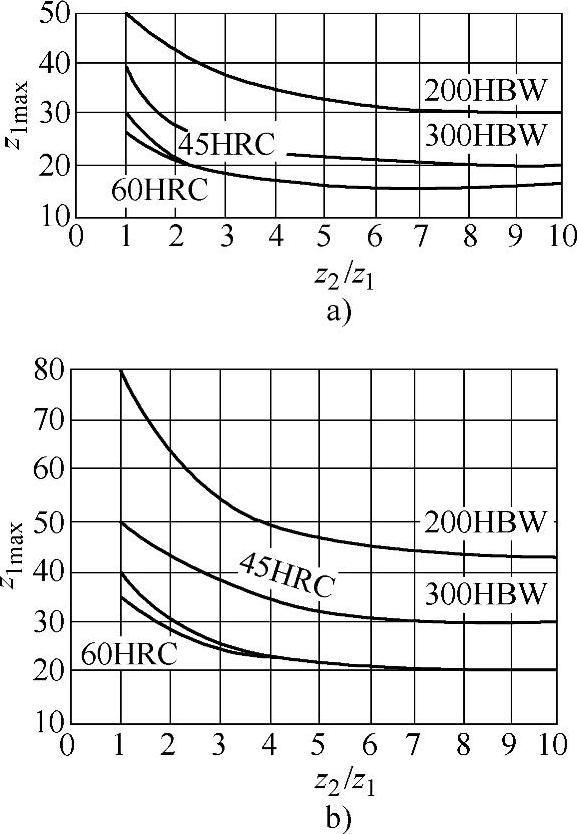
图8-11 小齿轮的最大齿数
a)一般齿轮 b)高速齿轮
小齿轮的最大齿数z1max应保证齿轮有足够的弯曲强度。图8-11所示是根据接触和弯曲等强度条件推荐的z1max值。图中硬度值是外啮合副Ⅰ(即a—g副)中大齿轮的最低硬度,小齿轮的硬度应等于或大于大齿轮硬度。硬度值45HRC是经调质处理或整体淬火的硬度,60HRC是属于表淬硬度。
根据这个推荐,小齿轮齿数z1,当ibaH>4时,za=z1;当ibaH≤4时,zg=z1,相应 。
。
③凑齿数和zΣ根据如下三个条件凑zΣ值:
传动比条件—— 。
。
装配条件——2zΣ应是np的倍数。
非角度变位传动的同心条件——2zΣ应为偶数。
对角度变位传动,不受2zΣ为偶数的同心条件限制,但当Δzg为整数时,仍要求2zΣ为偶数值。当Δzg为非整数时,则要求2zΣ为奇数值。
④计算内齿圈b及行星轮g的齿数
zb=2zΣ-za
对非角度变位传动zg=zΣ-za
对角度变位传动zg=zΣ-za-Δzg
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






