圆柱蜗杆、蜗轮精度是根据GB/T 10089—1988编写的,适用于轴交角Σ=90°,模数m≥1mm,蜗杆分度圆直径d1≤400mm,蜗轮分度圆直径d2≤4000mm;基本蜗杆可为阿基米德蜗杆(ZA蜗杆)、渐开线蜗杆(ZI蜗杆)、法向直廓蜗杆(ZN蜗杆)、锥面包络圆柱蜗杆(ZK蜗杆)和圆弧圆柱蜗杆(ZC蜗杆)。
(1)术语定义和代号(见表7-20)
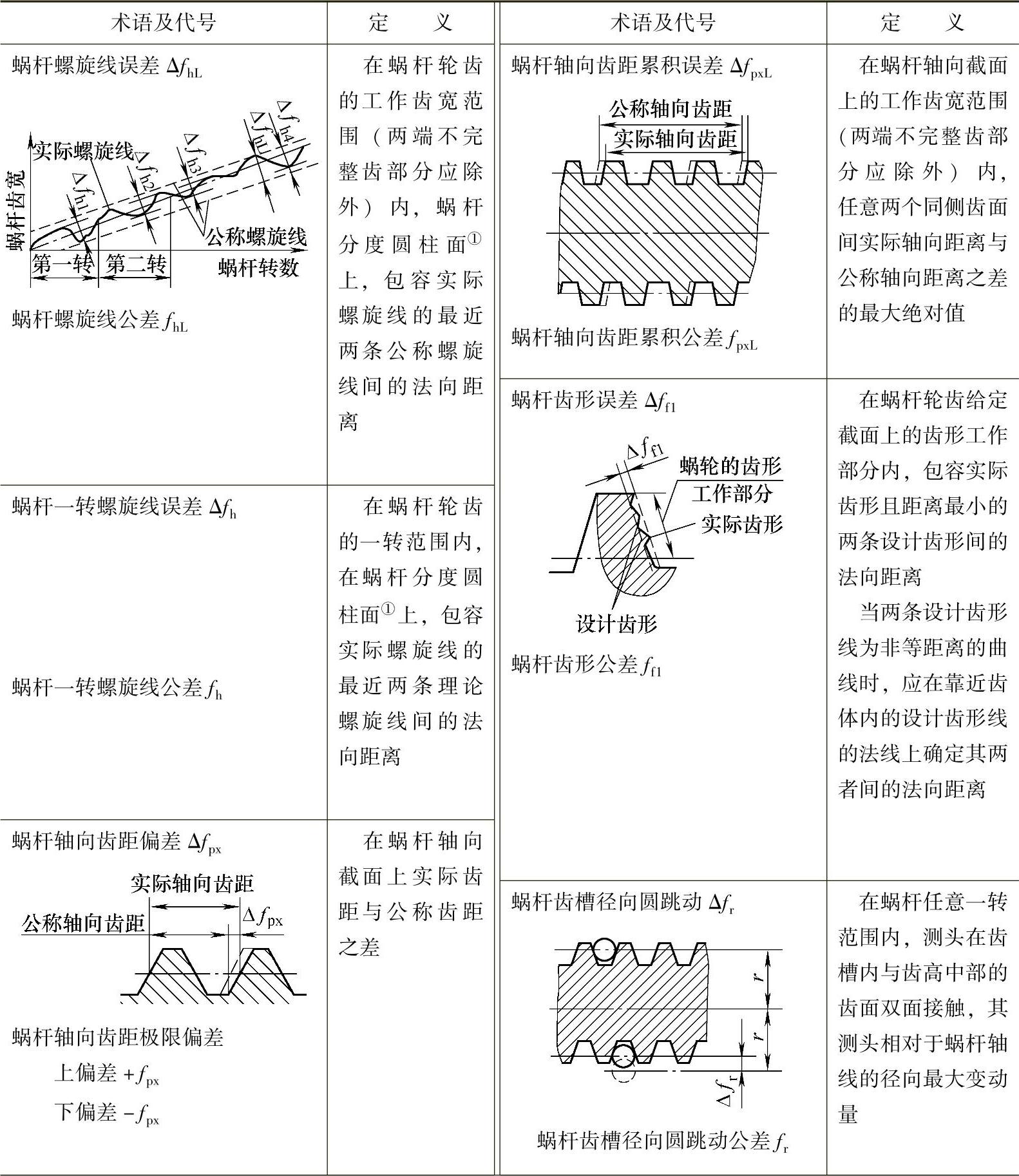
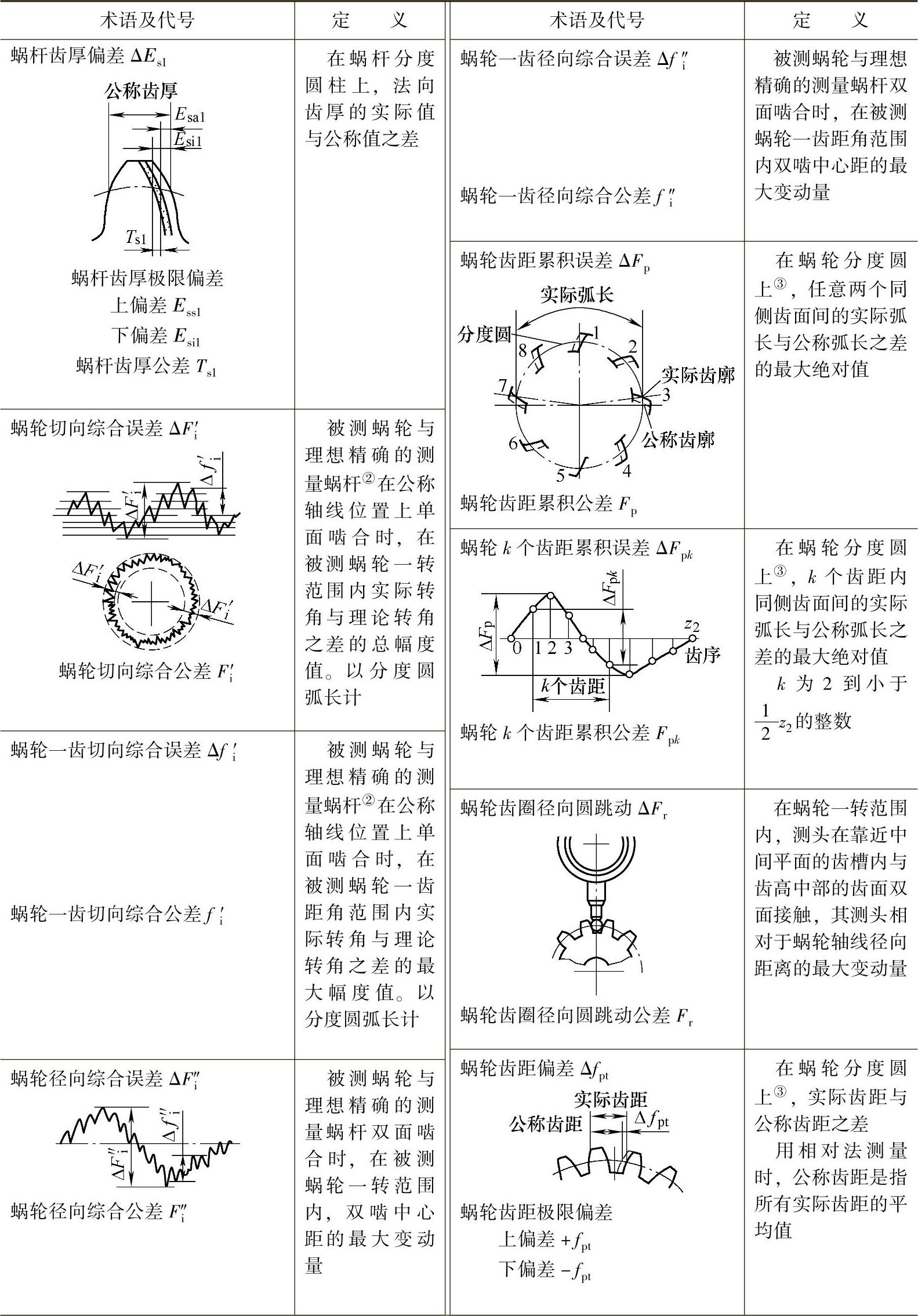
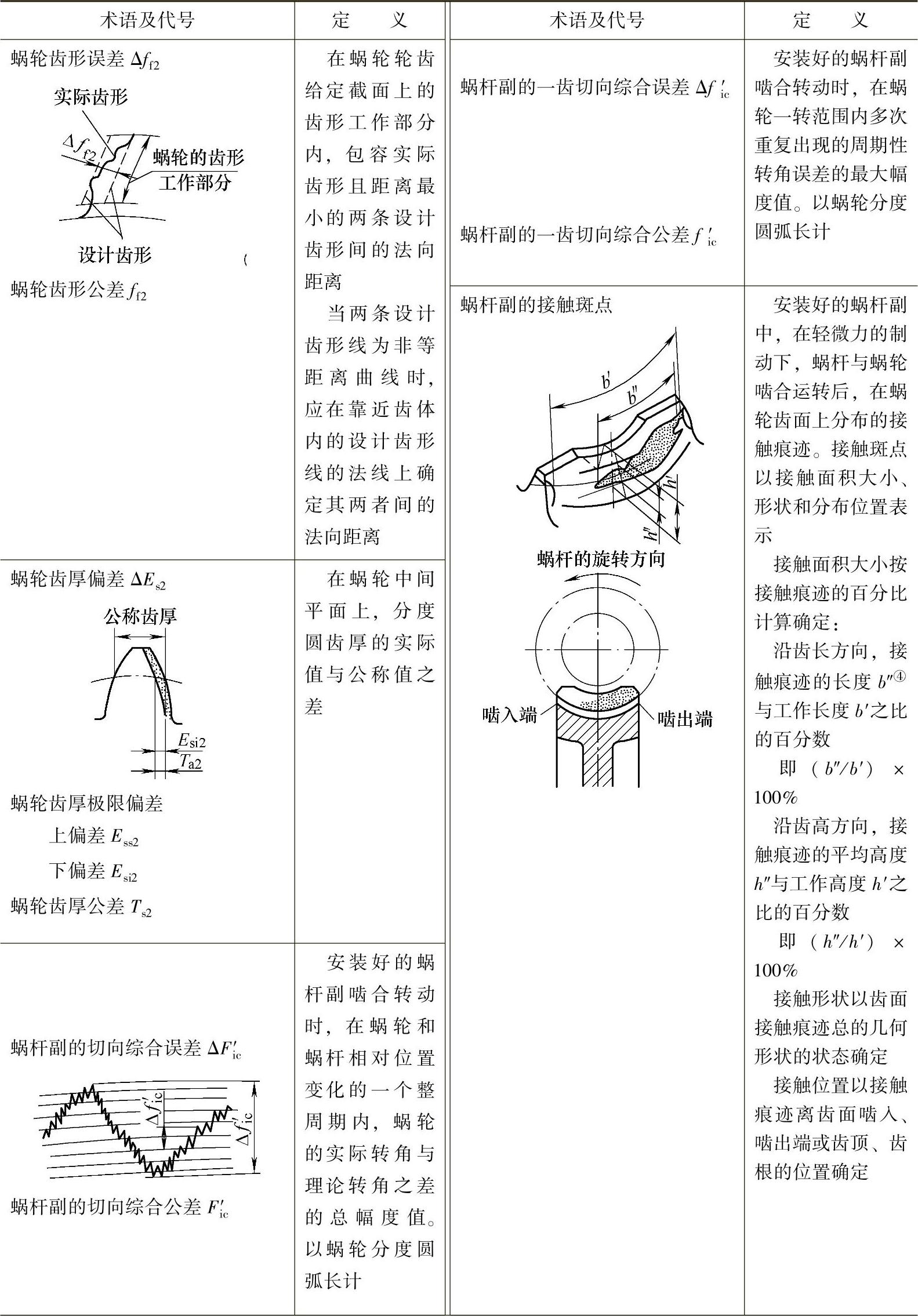
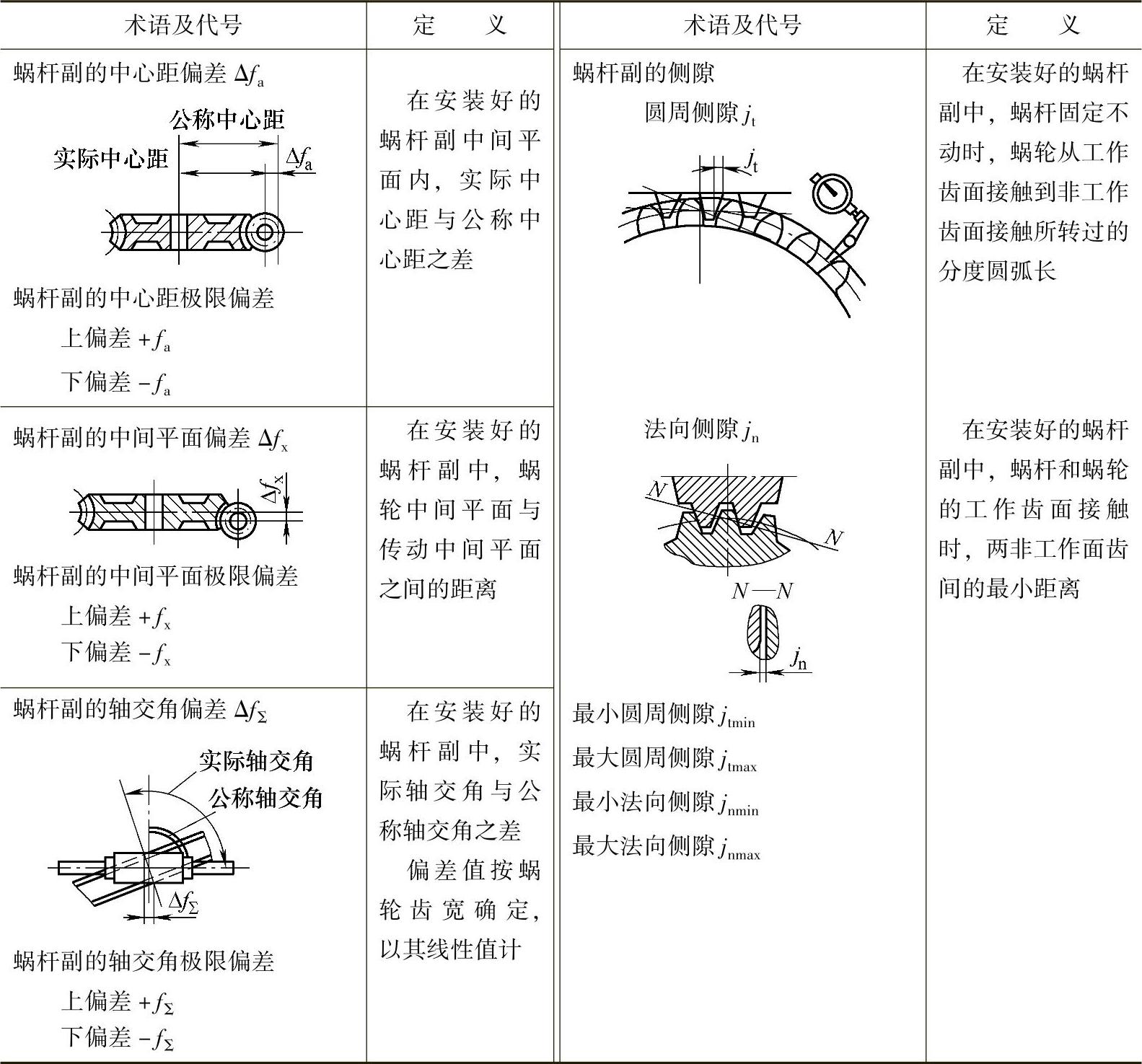
表7-20 蜗杆、蜗轮的误差、传动的误差和侧隙的术语定义和代号
(续)
(续)
(续)
①允许在靠近蜗杆分度圆柱的同轴圆柱面上检验。
②允许用配对蜗杆代替测量蜗杆进行检验。
③允许在靠近中间平面的齿高中部进行测量。
④在确定接触痕迹长度b″时,应扣除超过模数值的断开部分。
(2)公差等级
国标对蜗杆、蜗轮和蜗杆传动规定12个公差等级,第1级精度最高,第12级精度最低。
按照公差的特性对传动性能的主要保证作用,将公差(或极限偏差)分成三个公差组:
第Ⅰ公差组:蜗杆:—
蜗轮:Fi′,F″i,Fp,Fpk,Fr
传动:Fi′c;
第Ⅱ公差组:蜗杆:fh,fhL,fpx,fpxL,fr
蜗轮:fi′,f″i,fpt
传动:fi′c;
第Ⅲ公差组:蜗杆:ff1
蜗轮:ff2
传动:接触斑点,fa,fΣ,fx。
根据使用要求不同,允许各公差组选用不同的公差等级组合,但在同一公差组中,各项公差与极限偏差应保持相同的公差等级。
蜗杆和配对蜗轮的公差等级一般取成相同,也允许取成不相同。对有特殊要求的蜗杆传动,除Fr、Fi″、f″i、fr项目外,其蜗杆、蜗轮左右齿面的公差等级也可取成不相同。
(3)齿坯的要求
蜗杆、蜗轮的加工、检验和安装的径向、轴向基准面应尽可能一致,并应在相应的零件工作图上予以标注。蜗杆、蜗轮的齿坯公差,包括轴、孔的尺寸、形状和位置公差以及基准面的跳动公差列于表7-21、表7-22。
(4)蜗杆、蜗轮的检验和公差
1)蜗杆、蜗轮的检验 根据蜗杆传动的工作要求和生产规模,在各公差组中,选定一个检验组来评定和验收蜗杆、蜗轮的精度。当检验组中有两项以上的误差时,按最低的一项精度来评定蜗杆、蜗轮的公差等级。
第Ⅰ公差组的检验组
蜗杆:——
蜗轮:ΔFi′;ΔFp,ΔFpk;ΔFp(用于5~12级);ΔFr(用于9~12级);ΔF″i(用于7~12级)。
第Ⅱ公差组的检验组
蜗杆:Δfh,fhL(用于单头蜗杆);Δfpx,ΔfhL(用于多头蜗杆);Δfpx,ΔfpxL,Δfr;Δfpx,ΔfpxL(用于7~9级);Δfpx(用于10~12级)。
蜗轮:ΔFi′;ΔF″i(用于7~12级);Δfpt(用于5~12级)。
第Ⅲ公差组的检验组
蜗杆:Δff1。
蜗轮:Δff2。
当蜗杆副对接触斑点有要求时,蜗轮的齿形误差Δff2可不进行检验。
若制造厂与订货者有专门协议时,应按协议进行蜗杆、蜗轮精度的验收、评定。
2)蜗杆、蜗轮的公差和极限偏差 蜗杆的各项公差和极限偏差列于表7-23、表7-24;蜗轮的各项公差和极限偏差列于表7-25、表7-26。
蜗轮的Fi′、fi′值按下式计算:
Fi′=Fp+ff2 (7-8)
fi′=0.6(fpt+ff2) (7-9)
上述公差和偏差值都是以蜗杆、蜗轮的工作轴线为测量的基准轴线。当实际测量基准不符合本规定时,应从测量结果中消除基准不同所带来的影响。
当基本蜗杆齿形角α≠20°时,上述表中的fr、Fr、F″i、fi″值乘以sin20°/sinα。
(5)蜗杆传动的检验和公差
1)蜗杆传动的检验,蜗杆传动的精度主要以蜗杆副的切向综合误差ΔFi′c、蜗杆副的一齿切向综合误差Δfi′c和蜗杆副的接触斑点的形状、分布位置和面积大小来评定。
对5级和5级精度以下的传动,允许用蜗杆副的切向综合误差(ΔFi′)和蜗轮一齿切向综合误差(Δfi′)代替ΔFi′c、Δfi′c的检验,或以蜗杆、蜗轮相应公差组的检验组中最低结果来评定传动的第Ⅰ、Ⅱ公差组的公差等级。
对不可调中心距的蜗杆传动,检验接触斑点的同时,还应检验Δfa、Δfx和ΔfΣ。
2)蜗杆传动各检验项目的公差或极限偏差Fi′c、fi′c值按下式计算:
Fi′c=Fp+fi′c (7-10)
fi′c=0.7(fi′+fh) (7-11)
接触斑点的要求列于表7-29,fa、fx、fΣ值列于表7-27、表7-28。
进行了ΔFi′c、Δfi′c和接触斑点检验的蜗杆传动,允许相应的第Ⅰ、Ⅱ、Ⅲ公差组的蜗杆、蜗轮检验组和Δfa、Δfx、ΔfΣ中任意一项误差超差。
(6)蜗杆传动的侧隙规定
GB/T 10089—1988中规定蜗杆传动的侧隙共分八种:a、b、c、d、e、f、g和h。最小法向侧隙值以a为最大,其他依次减小,h为零,如图7-13所示。侧隙种类与公差等级无关。
根据工作条件和使用要求来选择传动的侧隙种类。各种侧隙的最小法向侧隙jnmin值列于表7-30。
传动的最小法向侧隙由蜗杆齿厚的减薄量来保证,即取蜗杆齿厚上偏差Ess1=-(jnmin/cosαn+EsΔ),蜗杆齿厚下偏差Esi1=Ess1-Ts1,EsΔ为制造误差的补偿部分,其值列于表7-32,Ts1为蜗杆齿厚公差,其值列于表7-31。
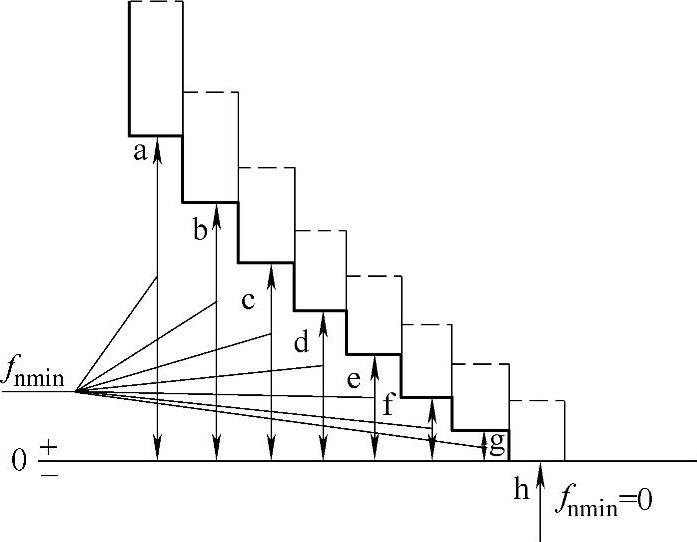
图7-13 蜗杆传动的法向侧隙
蜗轮齿厚上偏差Ess2=0,蜗轮齿厚下偏差Esi2=-Ts2,Ts2为蜗轮齿厚公差,其值列于表7-33。
对于可调中心距传动或不要求互换的传动,其蜗轮的齿厚公差可不作规定,蜗杆齿厚的上、下偏差由设计确定。
对各种侧隙表列数值系蜗杆传动在20℃时的情况,未计入传动发热和传动弹性变形的影响。传动中心距的极限偏差±fa见表7-27。
(7)工作图上的标注
在蜗杆、蜗轮工作图上,应分别标注公差等级,齿厚极限偏差或相应的侧隙种类代号和圆柱蜗杆、蜗轮精度国标的代号。标注示例如下:
1)蜗杆第Ⅱ、Ⅲ公差组的精度为5级,齿厚极限偏差为标准值,相配的侧隙种类为f,则标注为:

2)蜗杆第Ⅱ、Ⅲ公差组为5级精度,齿厚极限偏差为非标准值,如上偏差为-0.27mm,下偏差为-0.4mm,则标注为:
蜗杆5(-0.27-0.40)GB/T 10089—1988
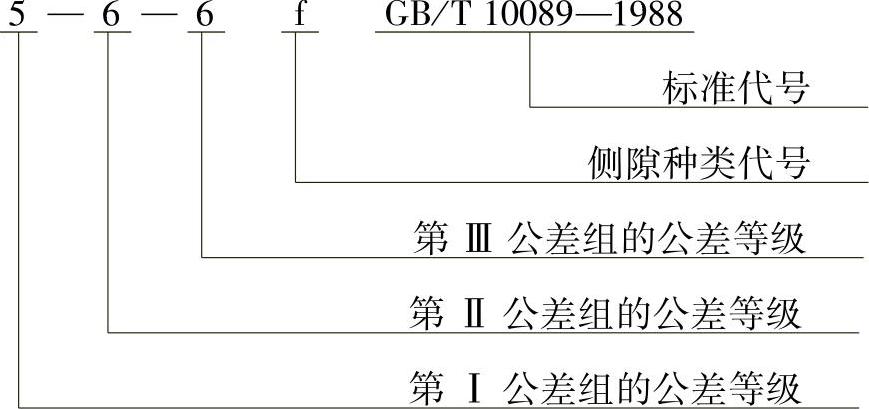
3)蜗轮的三个公差组的精度同为5级,齿厚极限偏差为标准值,相配的侧隙种类为f,则标注为:

4)蜗轮的第Ⅰ公差组为5级精度,第Ⅱ、Ⅲ公差组的精度为6级,齿厚极限偏差为标准值,相配的侧隙种类为f。则标注为:
5)蜗轮的精度同上,齿厚无公差要求,则标注为:
5—6—6 GB/T 10089—1988(www.daowen.com)
(8)装配图上的标注
在蜗杆传动的装配图上,应标注出配对蜗杆、蜗轮的公差等级,侧隙种类代号和圆柱蜗杆、蜗轮精度的国标代号,标注示例如下:
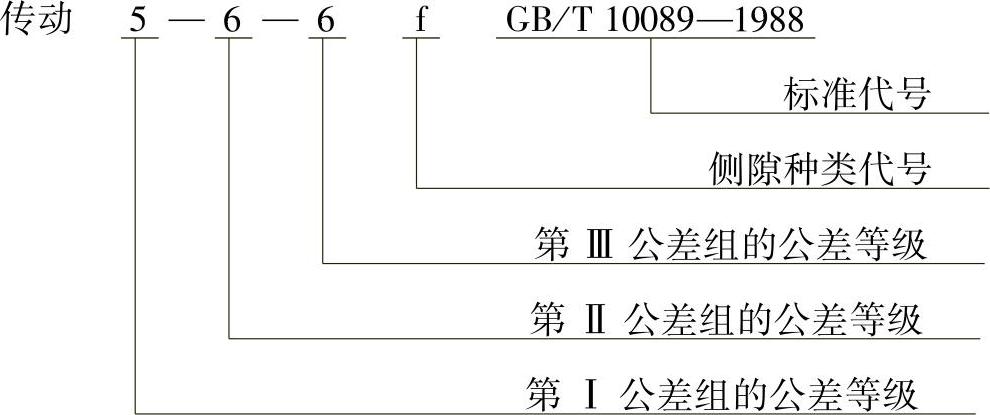
1)传动的三个公差组的精度同为5级,侧隙种类为f,则标注为:

2)传动的第Ⅰ公差组的精度为5级,第Ⅱ、Ⅲ公差组的精度为6级,侧隙种类为f,则标注为:
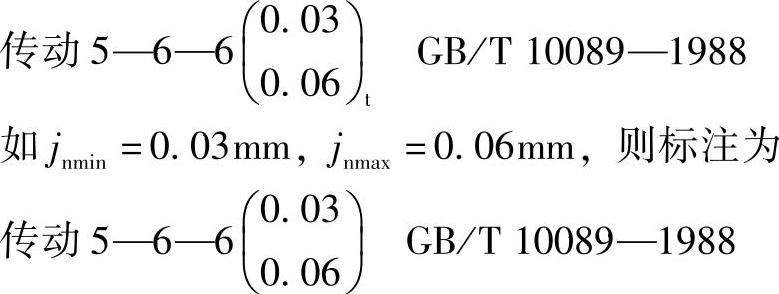
3)上例精度的蜗杆、蜗轮,若传动的侧隙为非标准值,如jtmin=0.03mm,jtmax=0.06mm,则标注为:
(9)公差数值表(见表7-21~表7-33)
表7-21 蜗杆、蜗轮齿坯尺寸和形状公差
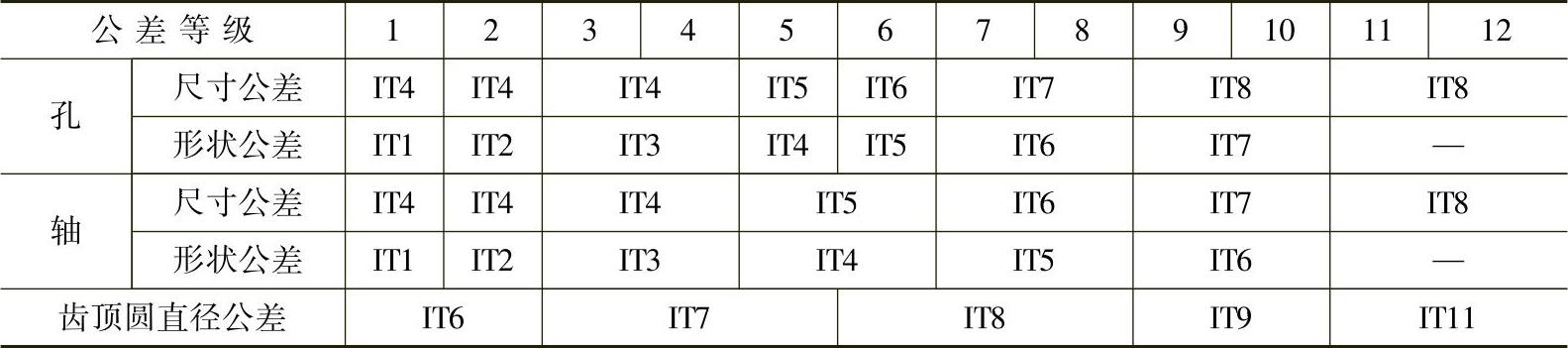
注:1.当三个公差组的公差等级不同时,按最高公差等级确定公差。
2.当齿顶圆不作测量齿厚基准时,尺寸公差按IT11确定,但不得大于0.1mm。
3.IT为标准公差,按GB/T 1800—2009的规定确定。
表7-22 蜗杆、蜗轮齿坯基准面径向和端面圆跳动公差(单位:μm)
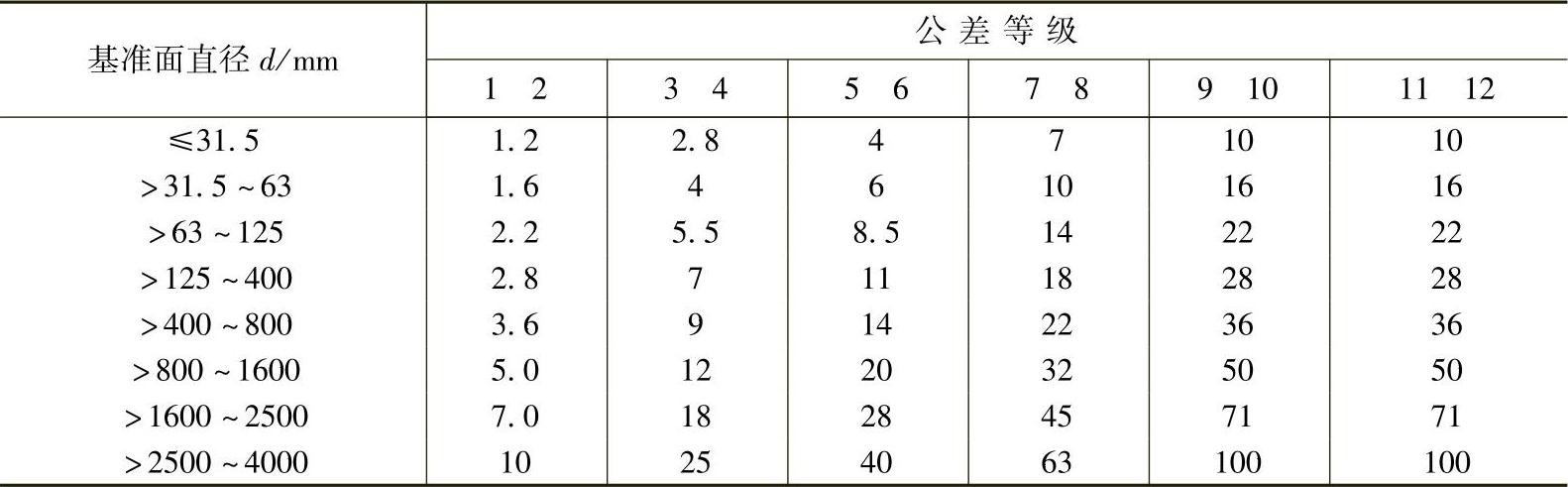
注:1.当三个公差组的公差等级不同时,按最高公差等级确定公差。
2.当以齿顶圆作为测量基准时,也即为蜗杆、蜗轮的齿坯基准面。
表7-23 蜗杆的公差和极限偏差fh、fhL、fpx、fpxL、ff1值 (单位:μm)
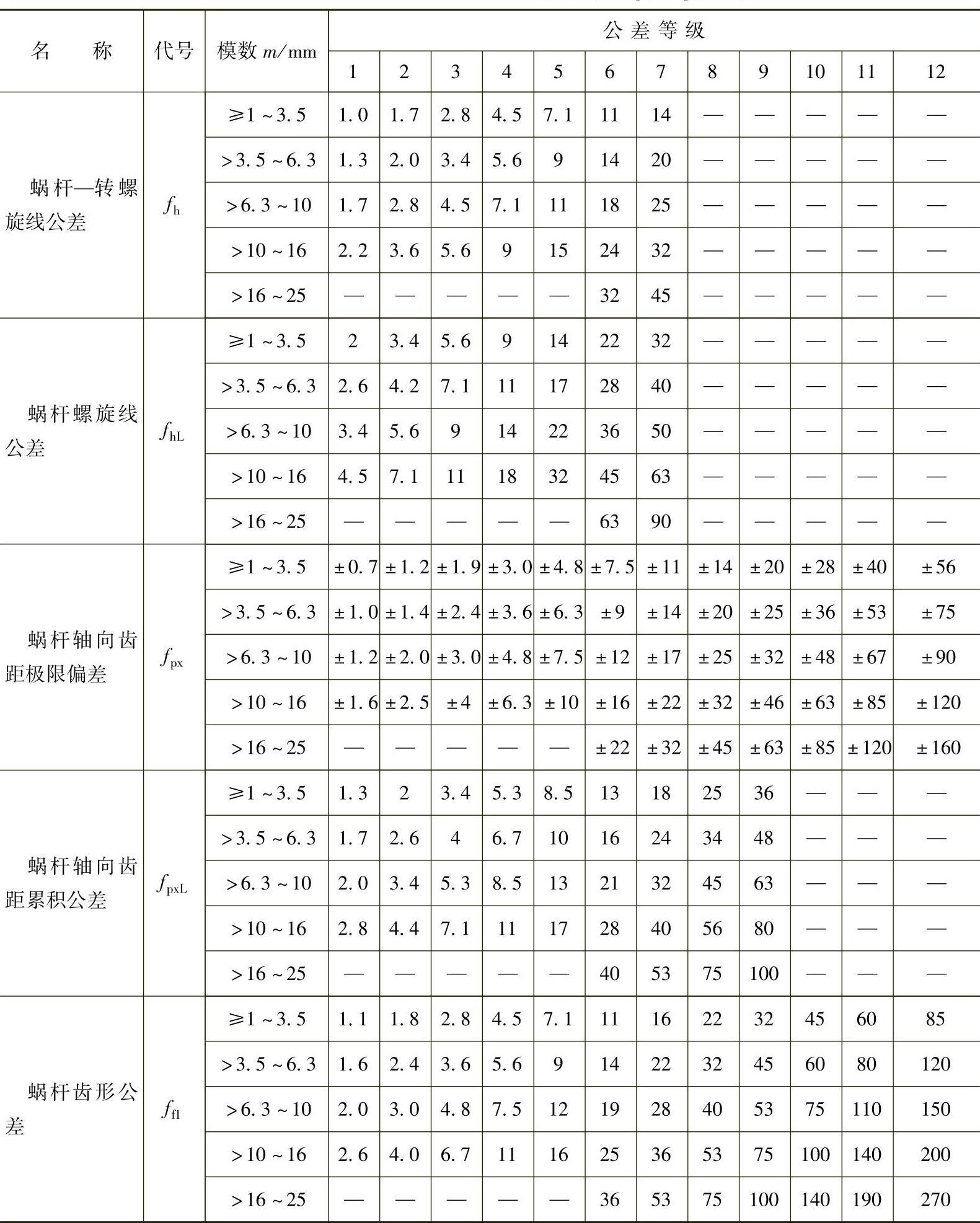
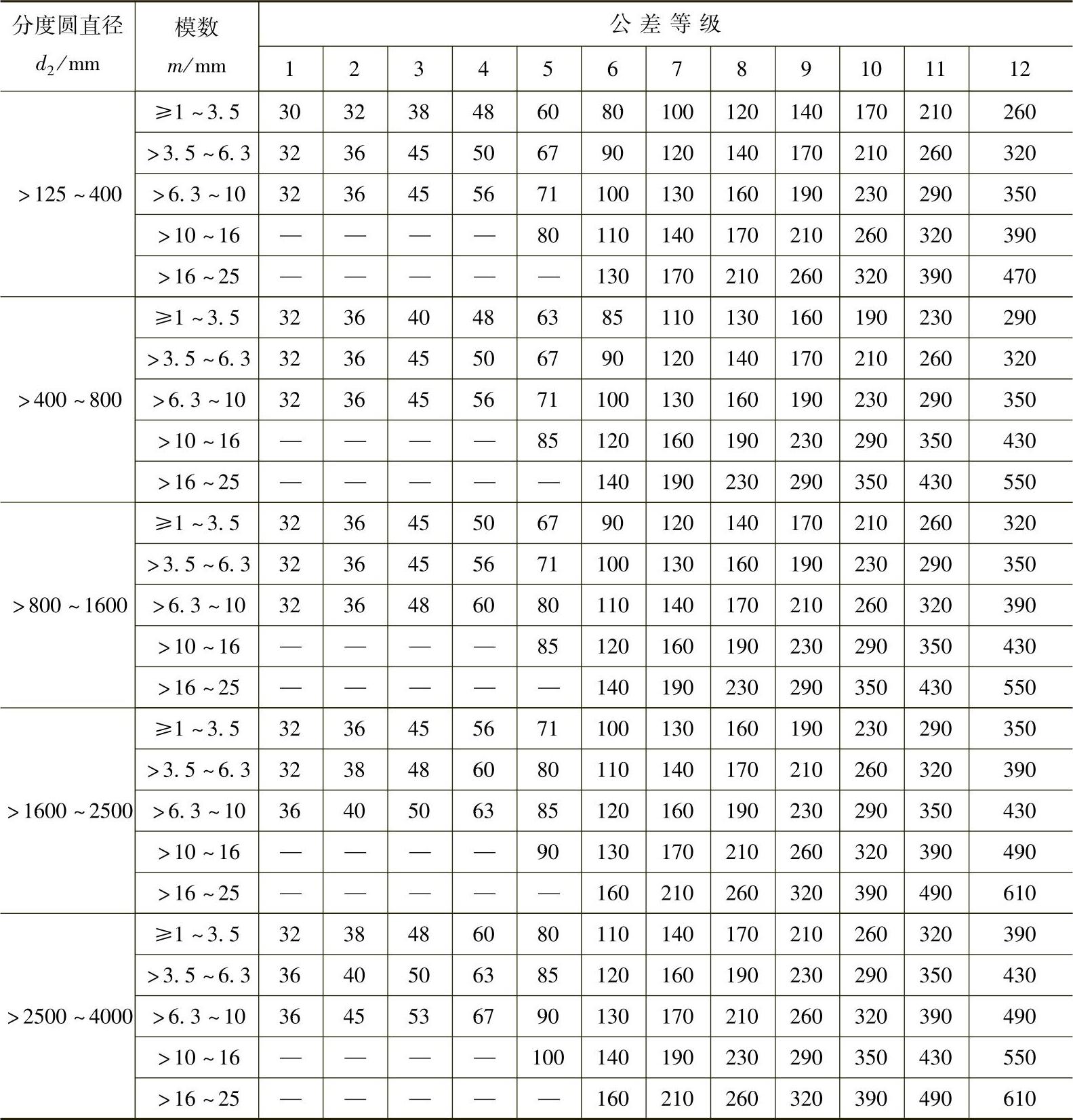
表7-24 蜗杆齿槽径向圆跳动公差fr值 (单位:μm)

(续)
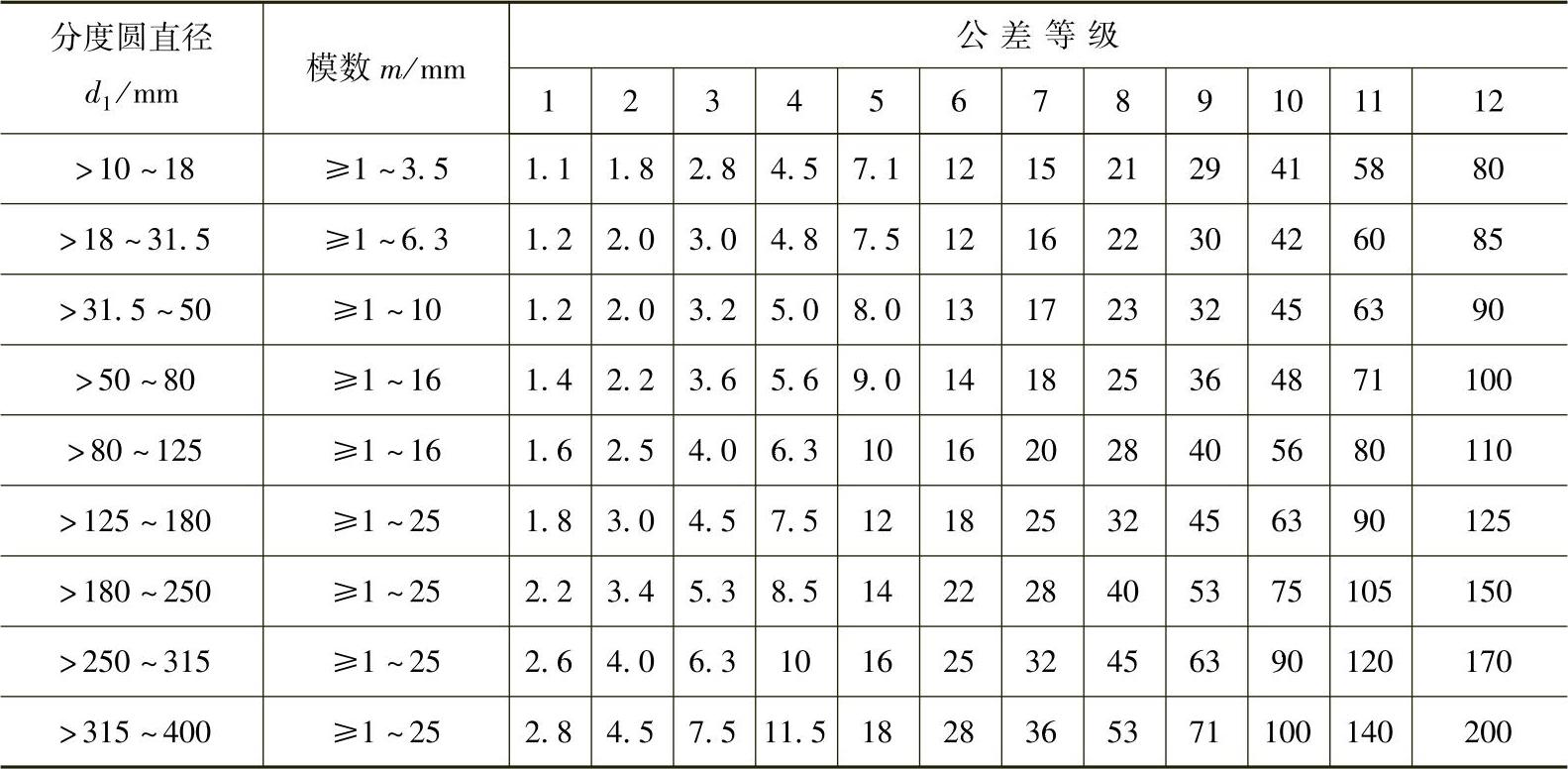
表7-25 蜗轮齿距累积公差Fp及k个齿距累积公差Fpk值 (单位:μm)
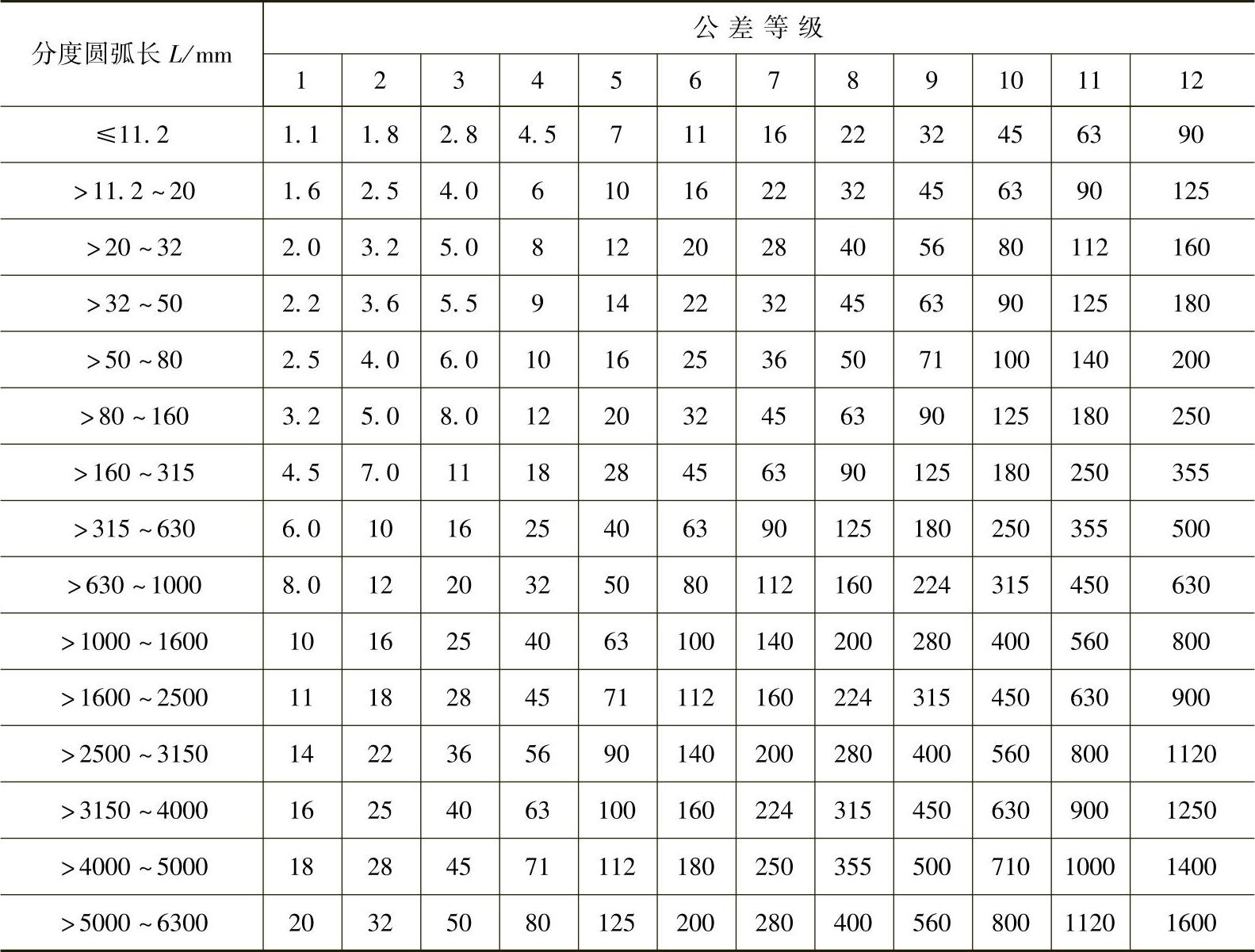
注:1.FP和Fpk按分度圆弧长L查表,查Fp时,取L=21πd2=21πmz2;查Fpk时,取L=kπm(k为2到小于z2/2的整数)。
2.除特殊情况外,对于Fpk,k值规定取为小于z2/6的最大整数。
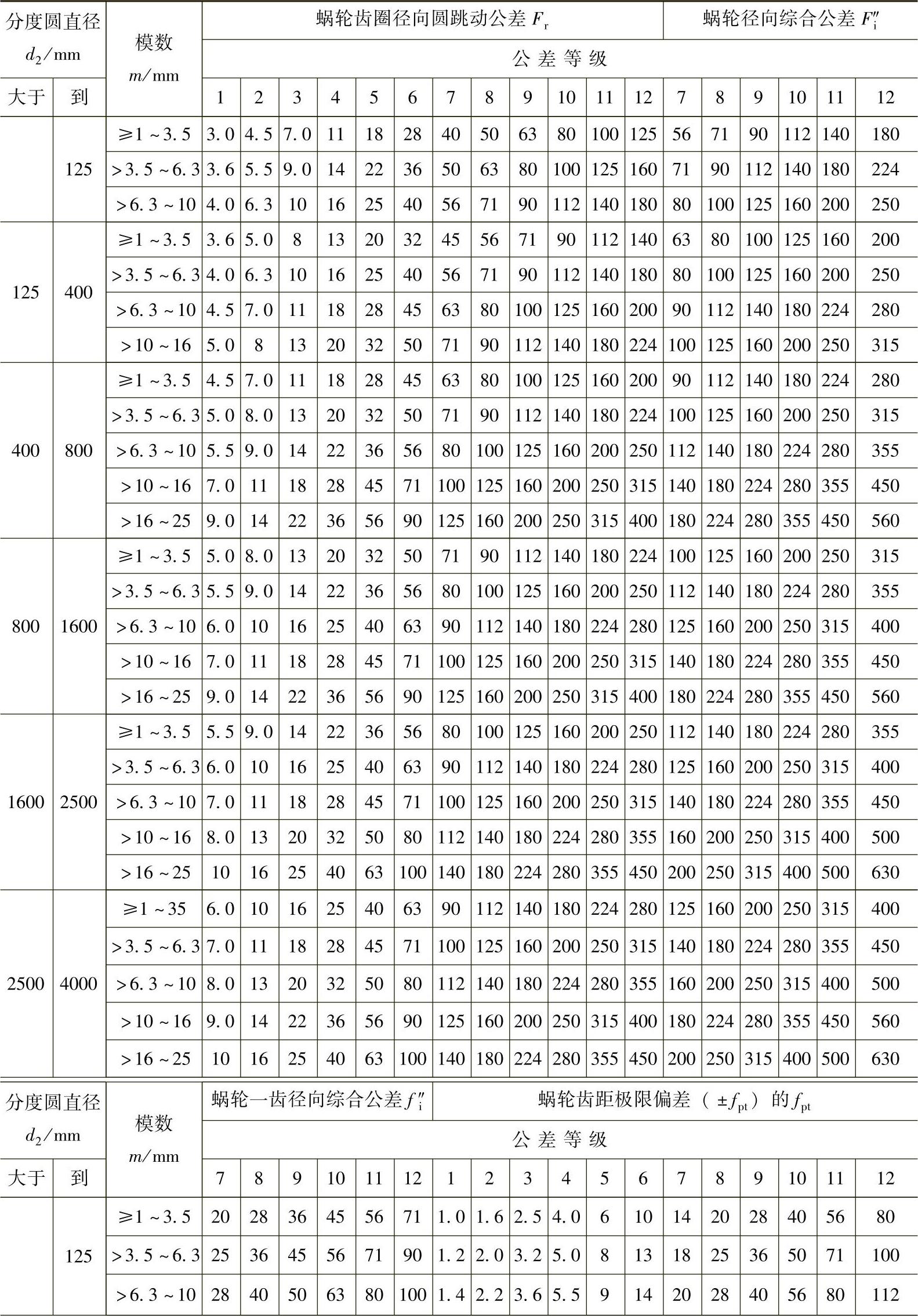
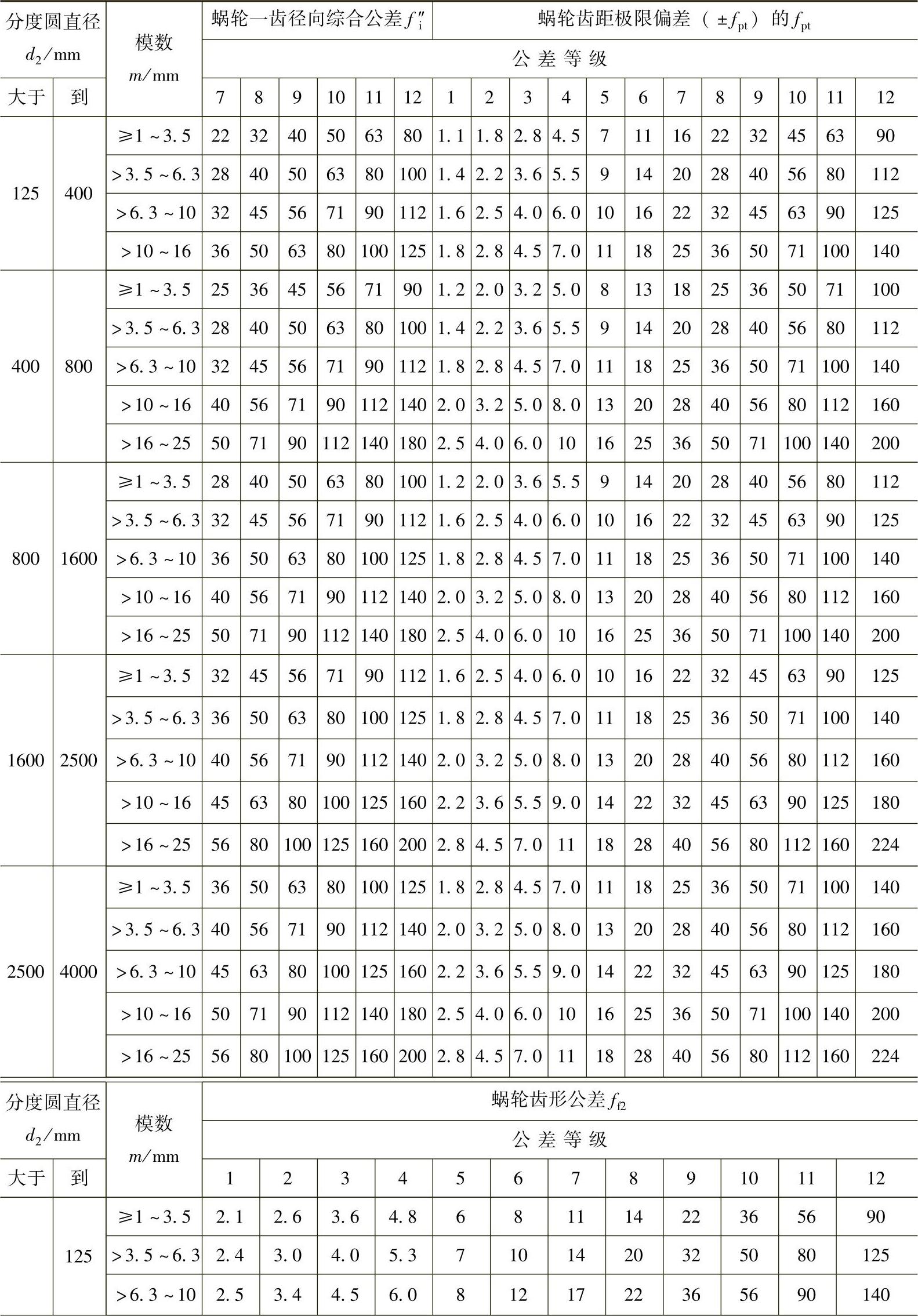
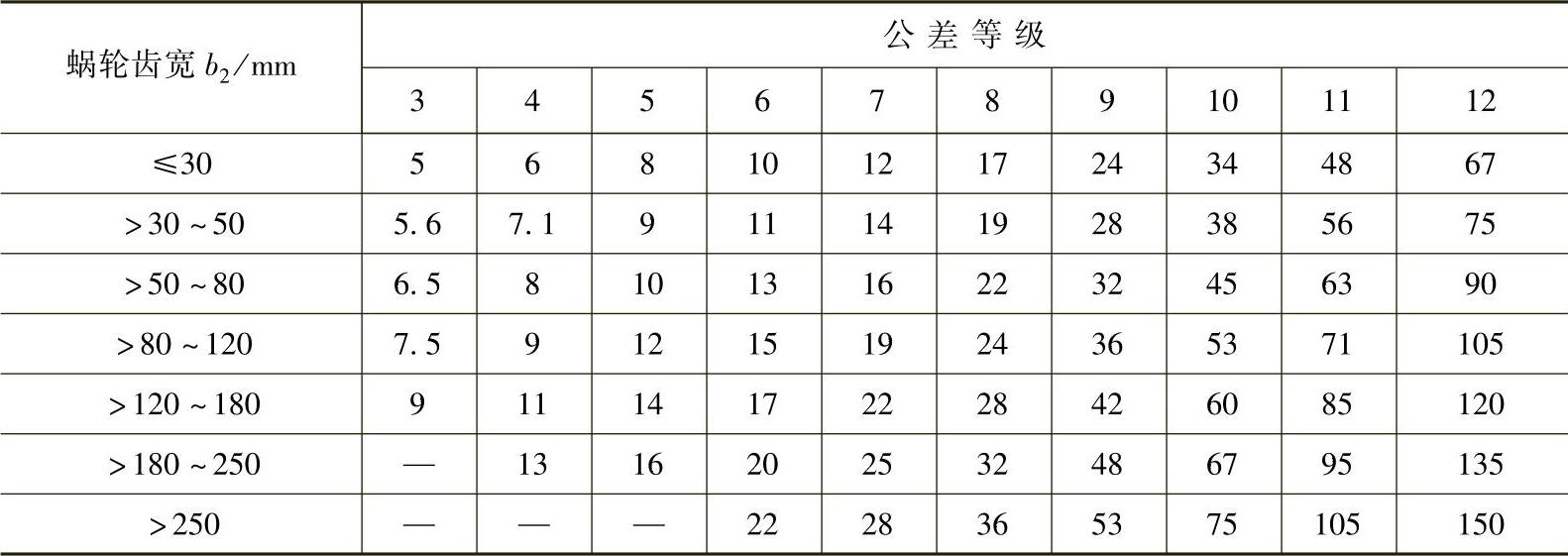
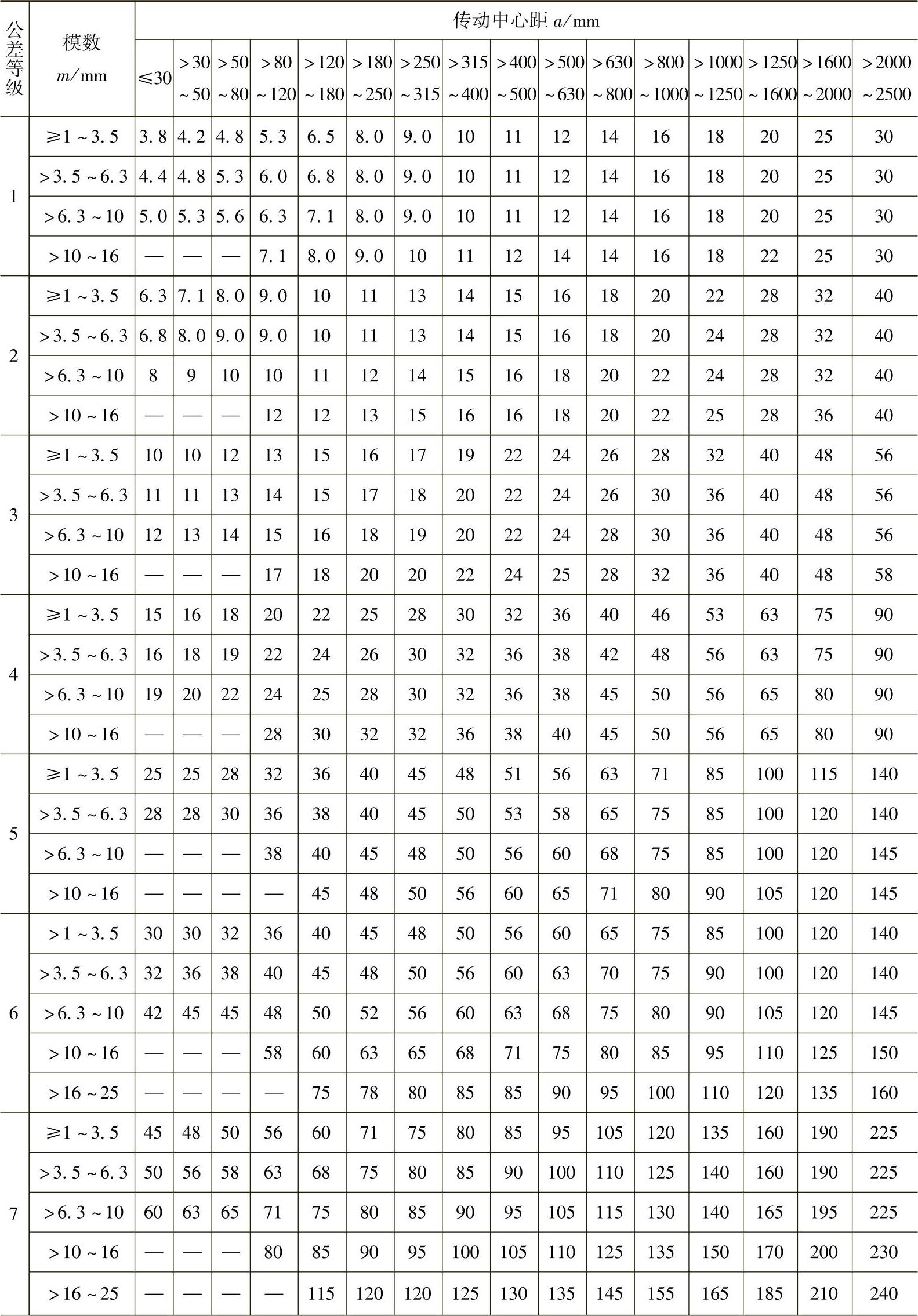
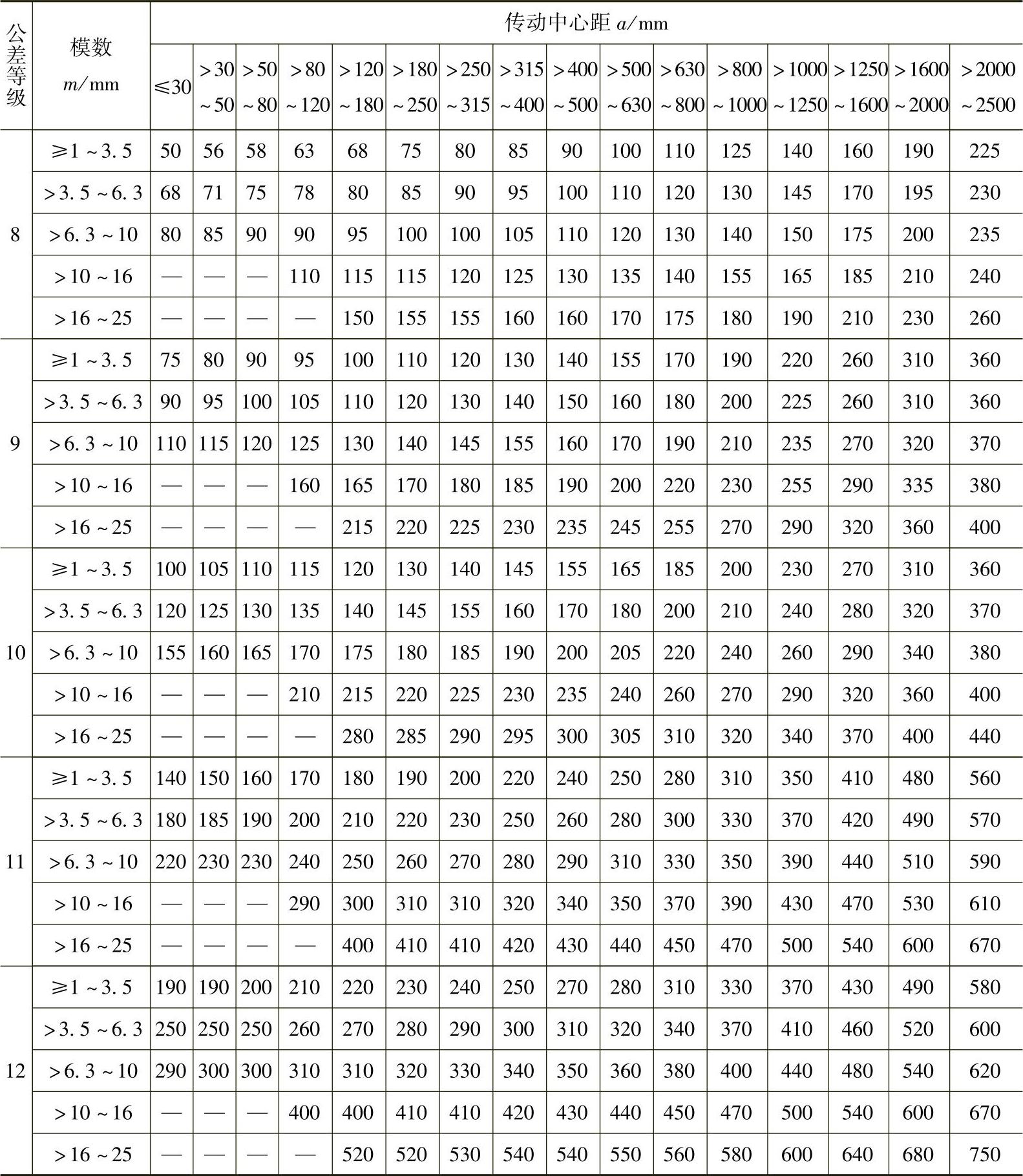
表7-26 蜗轮的Fr、F″i、f″i、fpt、ff2 (单位:μm)
(续)
(续)
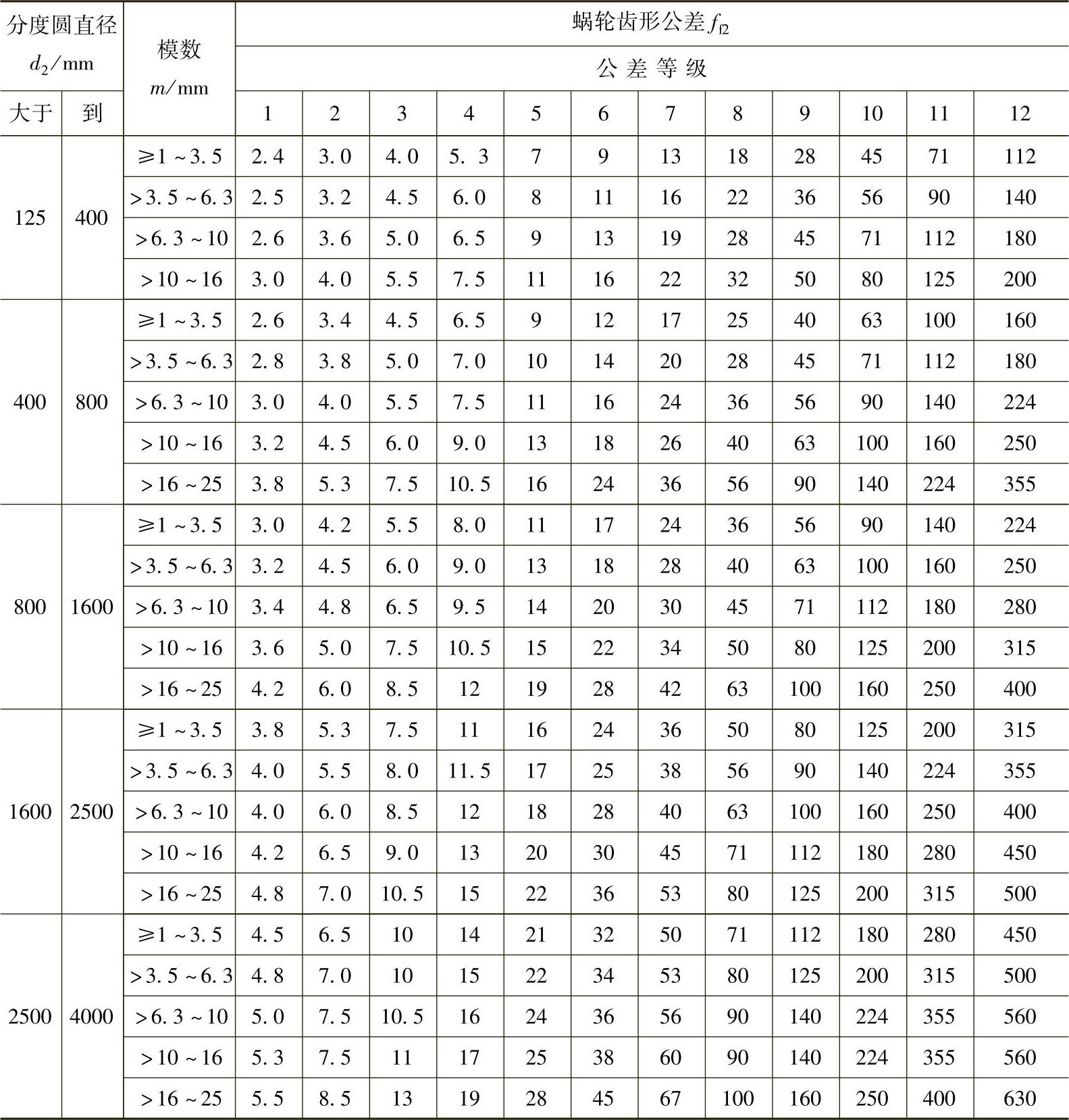
注:1.蜗轮切向综合公差Fi′=Fp+ff2。
2.蜗轮切向相邻齿综合公差fi′=0.6(fpt+ff2)。
表7-27 蜗杆副的中心距极限偏差(±fa)的fa和蜗杆副的中间平面极限偏差(±fx)的fx (单位:μm)
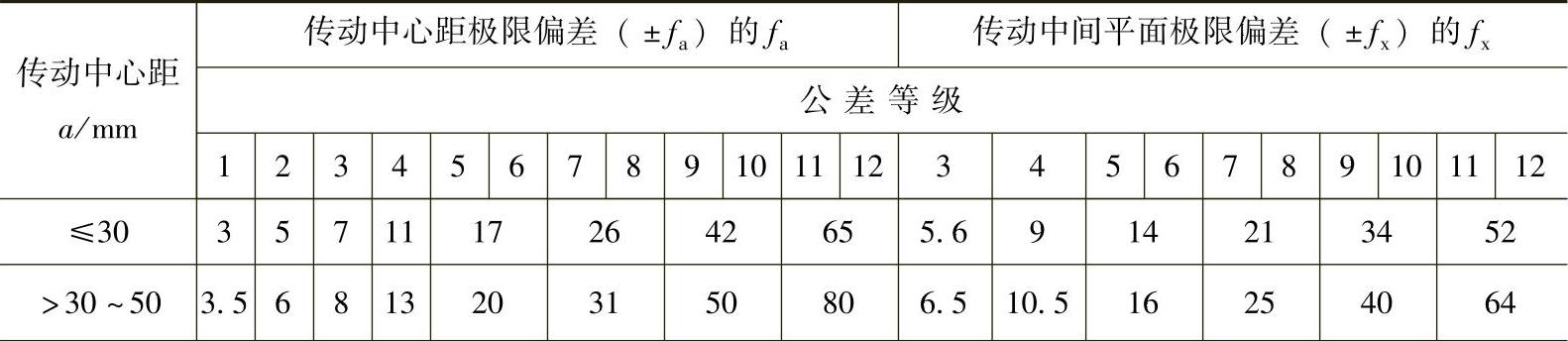
(续)

注:对中心距不可调的蜗杆传动才检验fa及fx。
表7-28 蜗杆副的轴交角极限偏差(±fΣ)的fΣ (单位:μm)
注:对中心距不可调的蜗杆传动才检验fΣ。
表7-29 蜗杆副的接触斑点的要求
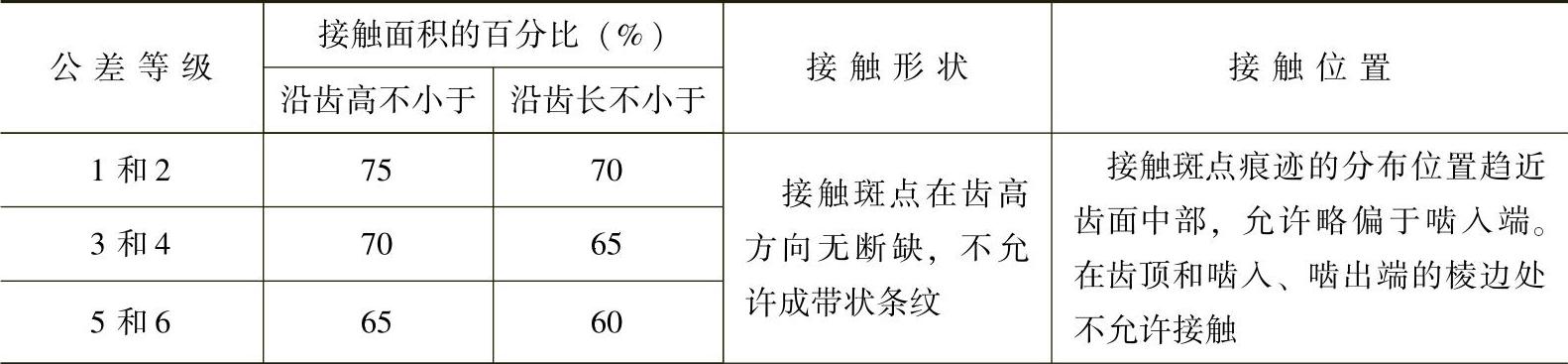
(续)
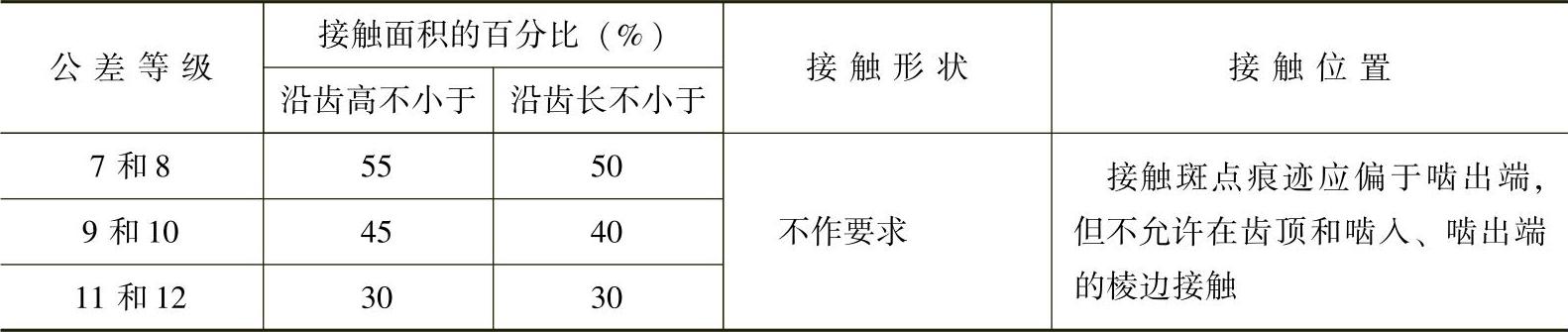
注:采用修形齿面的蜗杆传动,接触斑点的要求可不受本表规定的限制。
表7-30 蜗杆副的最小法向侧隙jnmin值 (单位:μm)
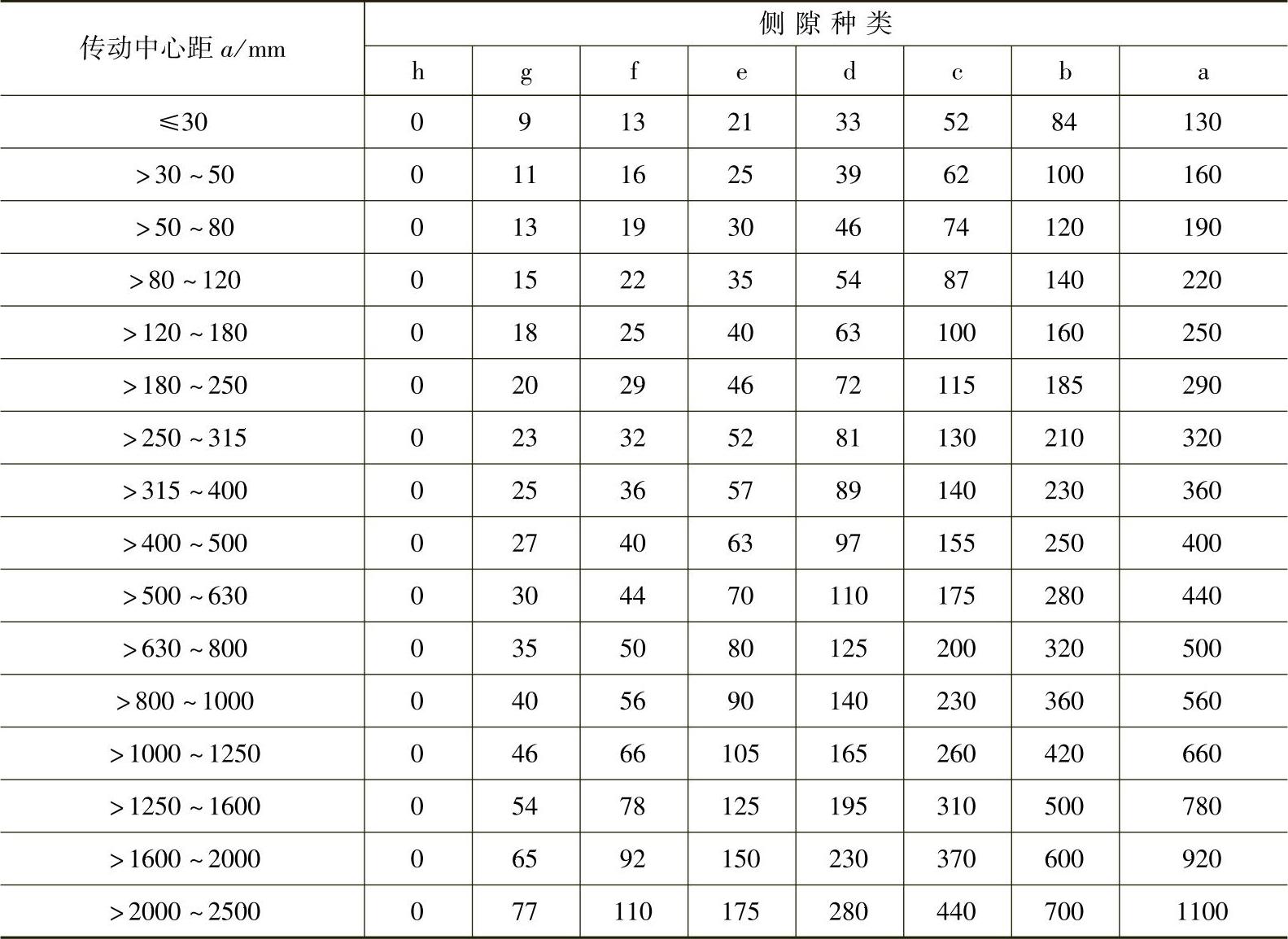
注:传动的最小圆周侧隙jtmin≈(jnmin/cosγ′)cosαn,γ′为蜗杆节圆柱导程角;αn为蜗杆法向齿形角。
表7-31 蜗杆齿厚公差Ts1值 (单位:μm)
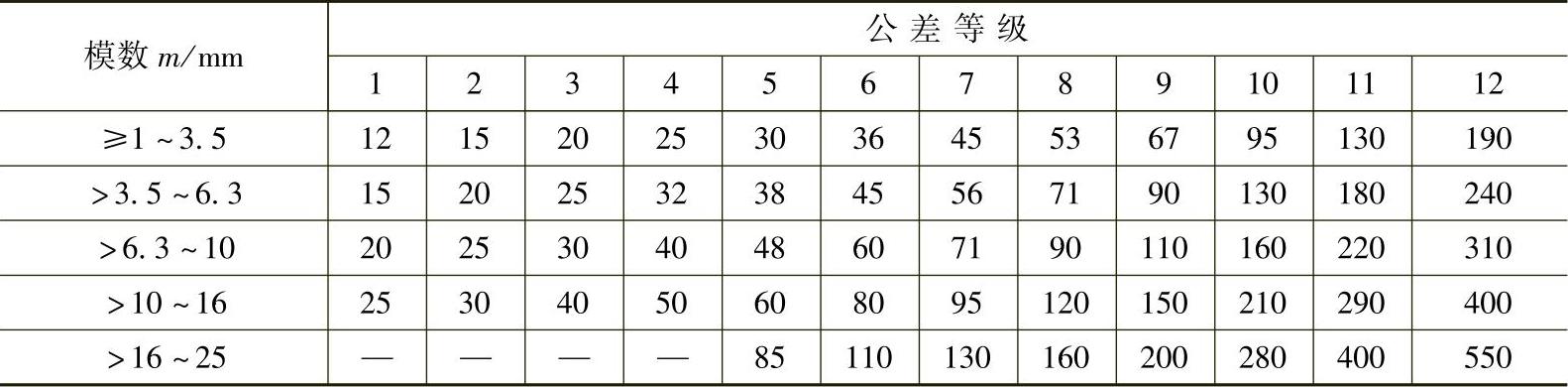
注:1.公差等级按蜗杆第Ⅱ公差组确定。
2.对传动最大法向侧隙jnmax无要求时,允许蜗杆齿厚公差Ts1增大,最大不超过两倍。
表7-32 蜗杆齿厚上偏差(Ess1)中的误差补偿部分EsΔ (单位:μm)
(续)
注:公差等级按蜗杆的第Ⅱ公差组确定。
表7-33 蜗轮齿厚公差Ts2 (单位:μm)

(续)
注:1.公差等级按蜗轮第Ⅱ公差组确定。
2.在最小法向侧隙能保证的条件下,Ts2公差带允许采用对称分布。
(10)误差的有关关系式(见表7-34~表7-36)
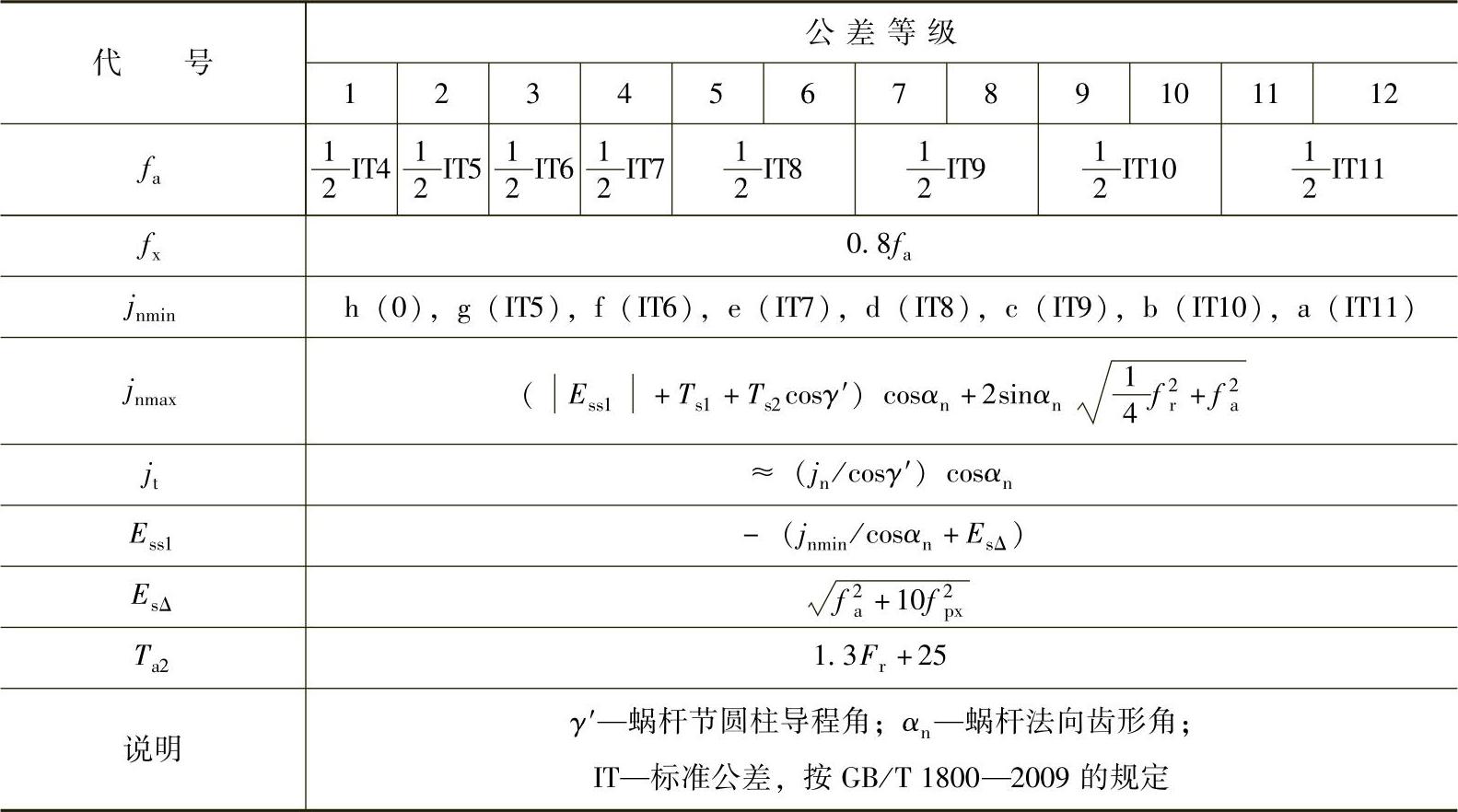
表7-34 极限偏差和公差与蜗杆几何参数的关系式
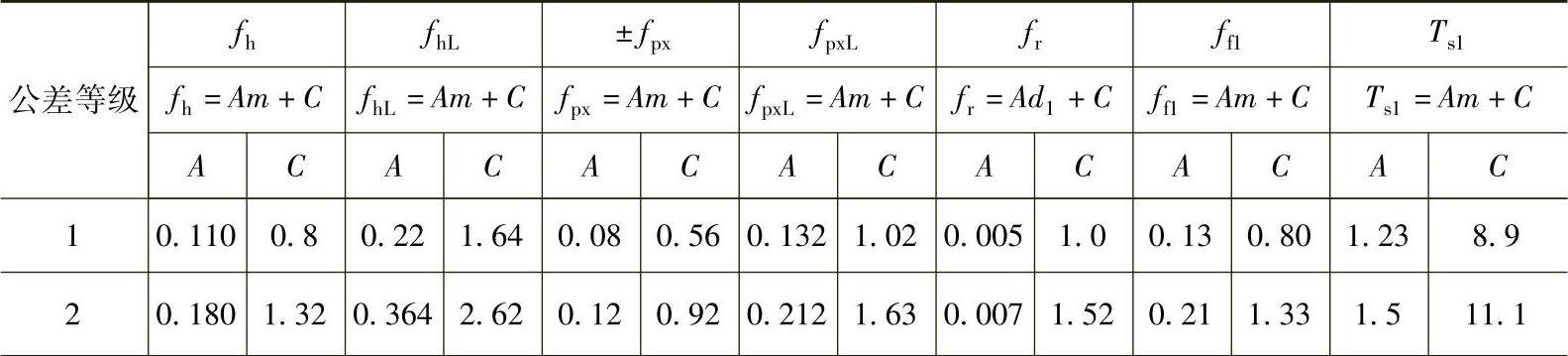
(续)
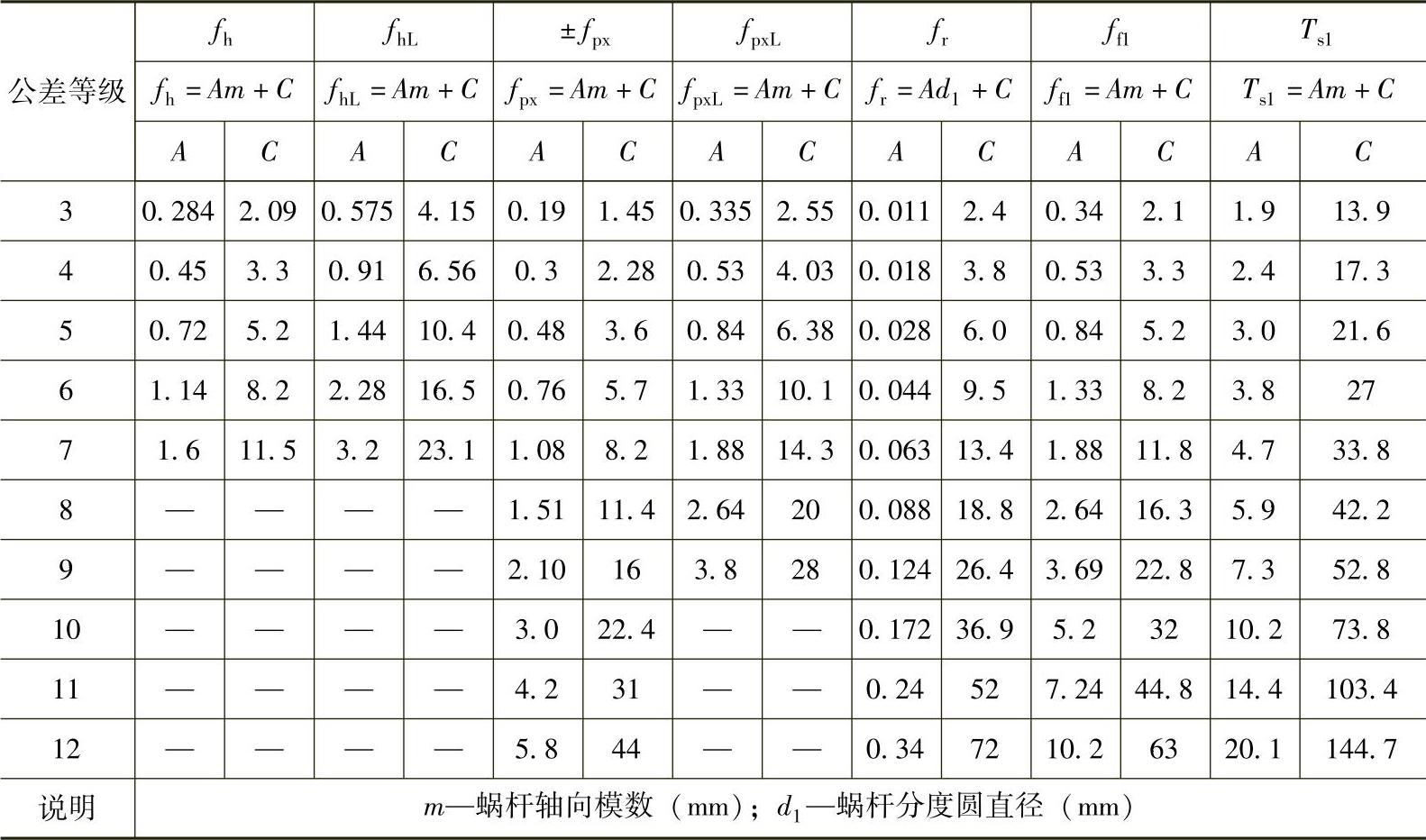
表7-35 极限偏差和公差与蜗轮几何参数的关系式
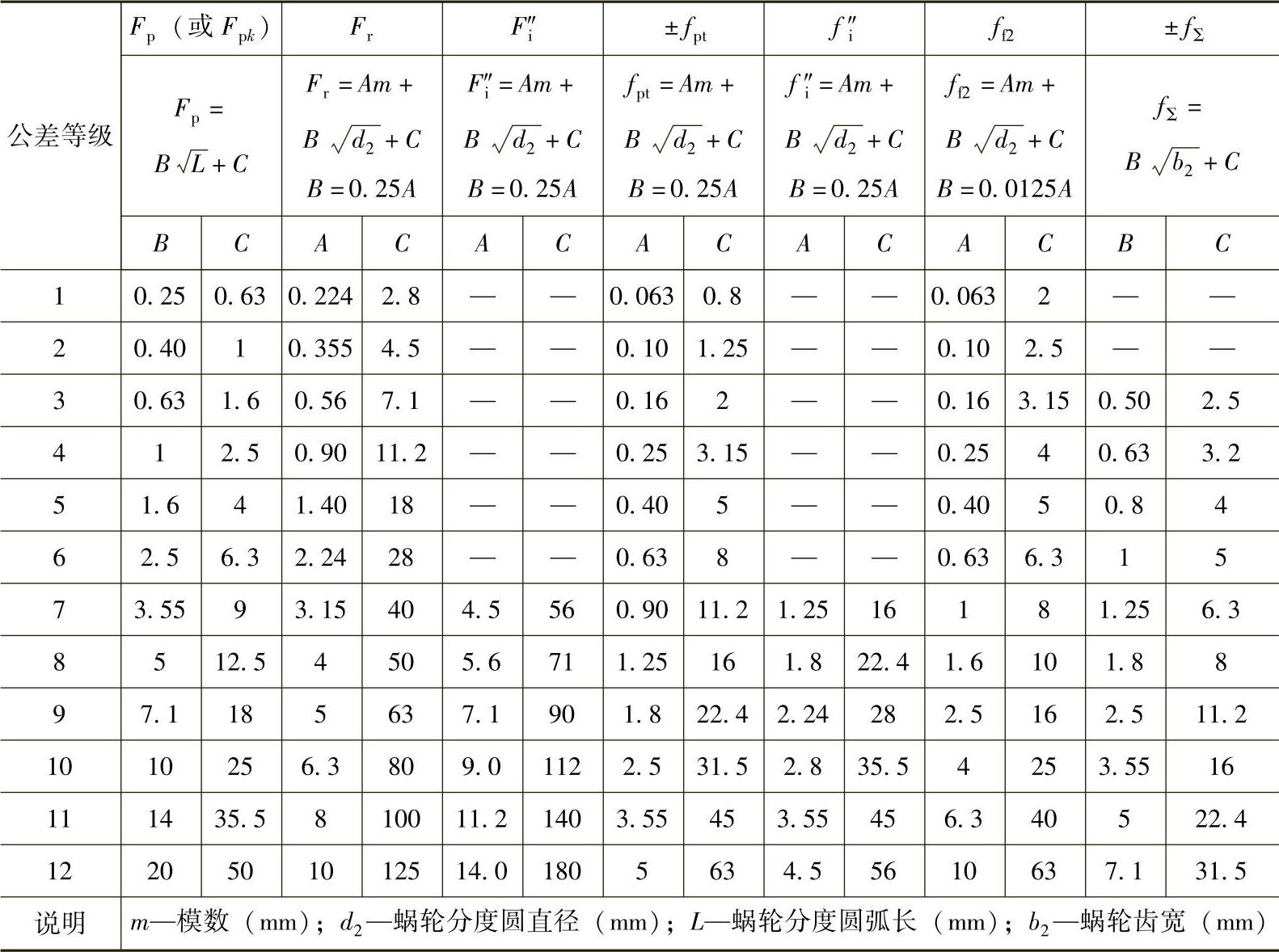
注:d2≤400mm的Fr、F″i公差按表中所列关系式再乘以0.8确定。
表7-36 极限偏差或公差间的相关关系式
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





