为了说明线图的由来和具体应用,现将变位齿轮传动的一些基本公式作一简述:中心距变动系数yt:

式中 a′——变位齿轮传动的中心距;
a——标准中心距;
mt——端面模数,对于直齿轮mt=m;
mn——法向模数。
端面啮合角α′t为

式中 αt——端面压力角,对于直齿轮αt=α。由式(2-14)、式(2-15)得中心距变动系数yt为

式中 z∑=z2±z1——齿数和,“+”号用于外啮合,“-”号用于内啮合。当螺旋角β=0时,则
式中 α′——直齿轮传动啮合角。
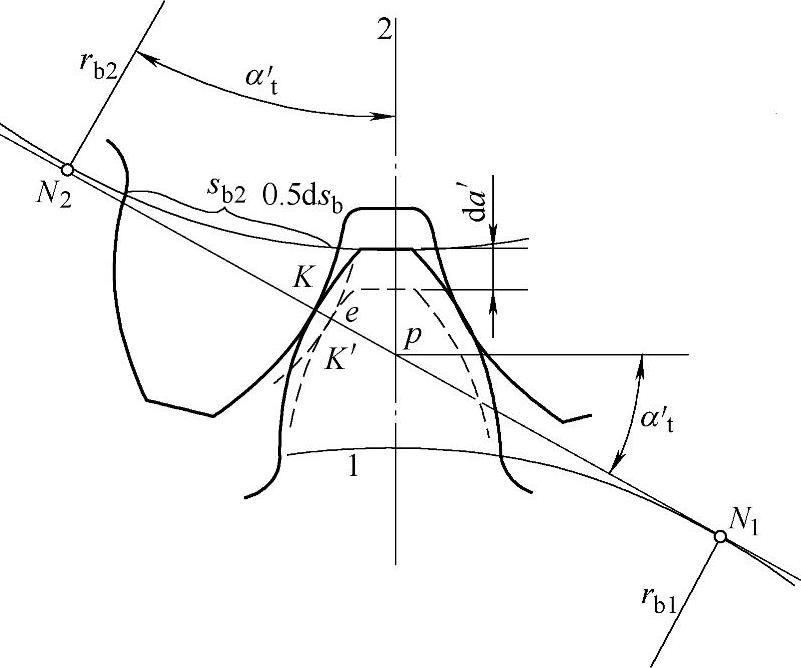
图2-10 x∑、z∑和αt′相互关系公式的推导
图2-10所示为小齿轮1和大齿轮2的轮齿作无侧隙啮合的情况。当中心距增大da′值后,便产生侧隙,其大小为

为了消除侧隙,可使轮齿在基圆rb2弧上的齿厚sb2(即基圆rb2弧上,轮齿渐开线间的距离)增大dsb2=2da′sinαt′,或者使小齿轮和大齿轮的弧齿厚sb1、sb2同时增大:
dsb2±dsb1=2da′sinα′t (2-17)
式中,“+”号用外啮合,“-”号用于内啮合。
在内啮合传动中,sb2为基圆rb2弧上形成齿槽的距离。当无侧隙时,中心距的正增量da′会引起卡住现象,即产生负侧隙。要避免这种情况,应使dsb2-dsb1之差具有正值。
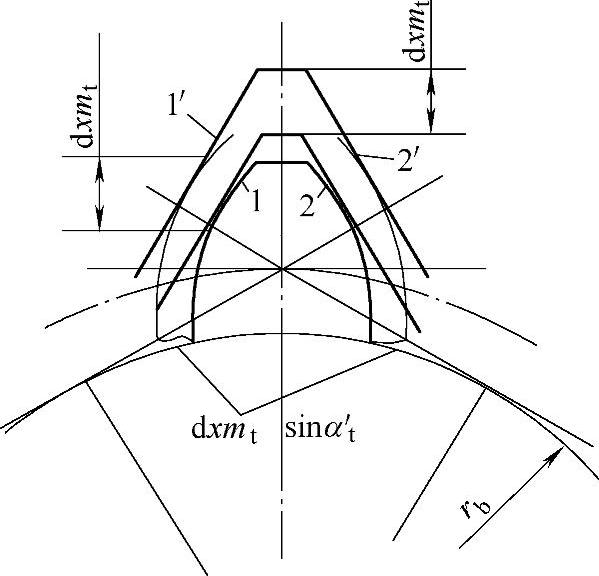
图2-11 基本齿廓位移对齿厚的影响
图2-11所示为齿条和轮齿渐开线1与2相啮合时的情况。令齿条位移值为dxmt,则轮齿渐开线齿形和齿条位移后的新啮合位置为1′和2′,同时齿条位移dxmt后,将引起轮齿渐开线之间在基圆弧上的距离sb增大,其大小为
dsb=2dxmtsinα′t
如果相啮合的一对齿轮,其小齿轮和大齿轮相对于齿条基本齿廓的位移增量分别为
dx1mt和dx2mt,则在基圆rb1、rb2上的轮齿渐开线之间弧长增量的总和为
dsb2±dsb1=2dx∑tmtsinα′t (2-18)
由式(2-17)、式(2-18)得

又从式(2-15)知
则
代入式(2-19)后,得
如果随着中心距的变化,啮合角从αt相应变化到α′t,则将上式积分,得

或
从式(2-19)中,可以明显地看出
dx∑tmt>da′
因此 x∑tmt=a′-a=ytmt (2-21)
即 x∑t>yt或x∑n>yn
现引用代号表示
x∑-y=Δy (2-22)
x∑t-yt=Δyt (2-23)
或x∑n-yn=Δyn
Δy、Δyt、Δyn分别为直齿、斜齿圆柱齿轮的齿顶高变动系数。式(2-22)用于直齿轮传动(β=0);式(2-23)用于β≠0的斜齿轮传动。
由式(2-16)和式(2-20)得

当β=0、αt=α时,则式(2-24)为

由此可见,采用上述公式进行角度变位传动计算是相当复杂的,这就是推荐用线图法计算的原因所在。
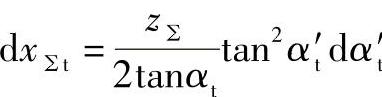
现将有关线图介绍如下,图2-12绘制出与z1、z2相关的允许的最大齿顶高变动系数Δy值的关系曲线。可根据z1和齿数比u=z2/z1查图2-12线图得Δy值。
按图2-12确定的Δy值(或相应的x∑值)是允许的最大角度变位,即符合封闭图许用区范围,因而不必验算根切、齿顶变尖、重合度和干涉条件等。
图2-13、图2-14是根据无侧隙啮合方程绘制的z∑和x∑与Δy、α′t的关系曲线图;图2-15、图2-16是根据z∑和y确定Δy值的线图;图2-17是压力角α=20°时,由x∑和z∑来确定端面啮合角α′t的线图。应用查线图计算角度变位的几何参数x∑、y、αt′(α′)、Δyt(Δy)值,与用繁杂的无侧隙啮合方程式计算相比,其计算工作量大为减少。尤其适用于行星齿轮传动的设计。应该指出计算角度变位参数是足够精确的,经多次计算表明,查线图线图过程中,除当在两曲线之间插值时,可能出现误差外,其几何计算误差也只有公法线长度公差值的1/3。
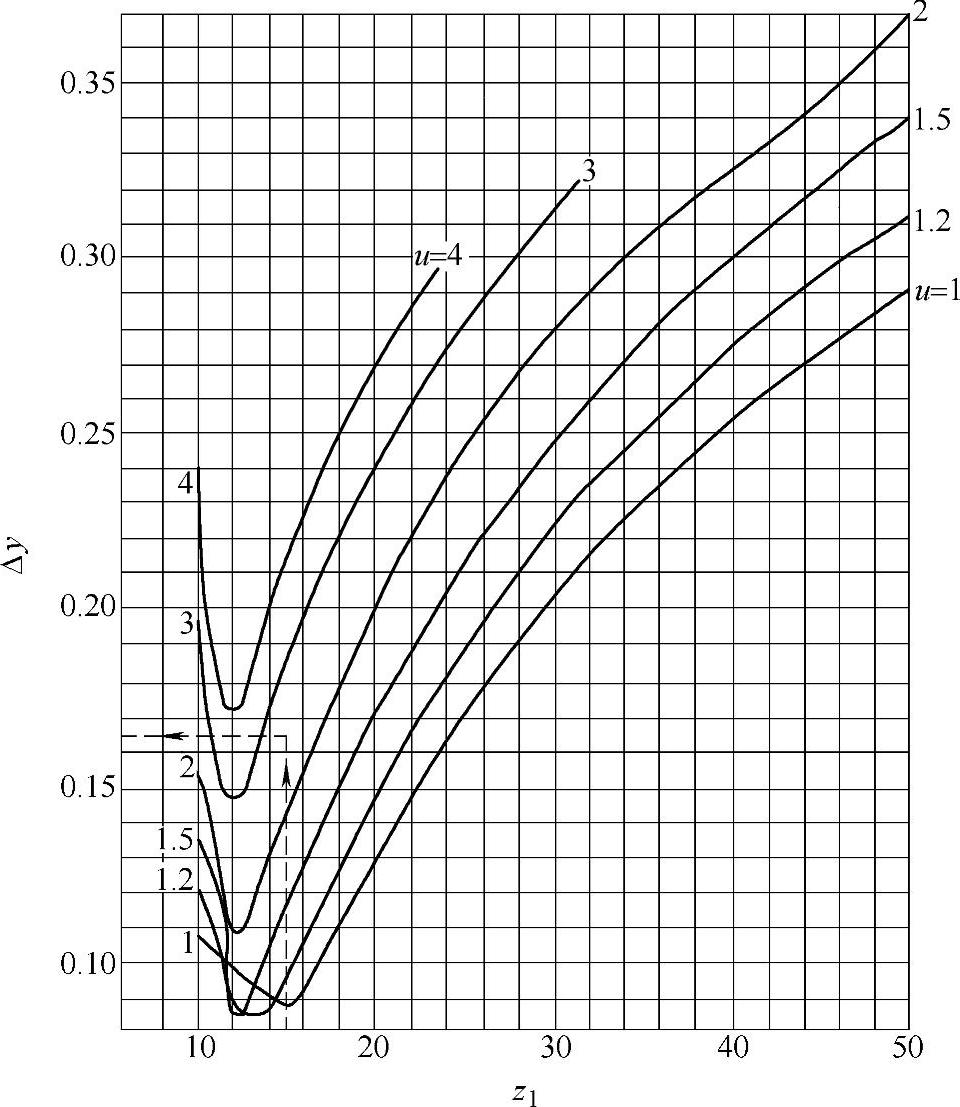
图2-12 根据z1和齿数比u=z2/z1确定Δy值之线图
例:已知z1=15,u=z2/z1=2.53,查线图得Δy=0.165(见图中虚线所示)。
图2-13 当x∑>0时,根据z∑和x∑确定Δy及αt′之线图(https://www.daowen.com)
例:已知z∑=63,x∑=1.08,查线图得Δy=0.105(见图中虚线所示)。从0点及z∑=63、x∑=1.08之标点连一直线,可得端面啮合角α′t=24°20′。
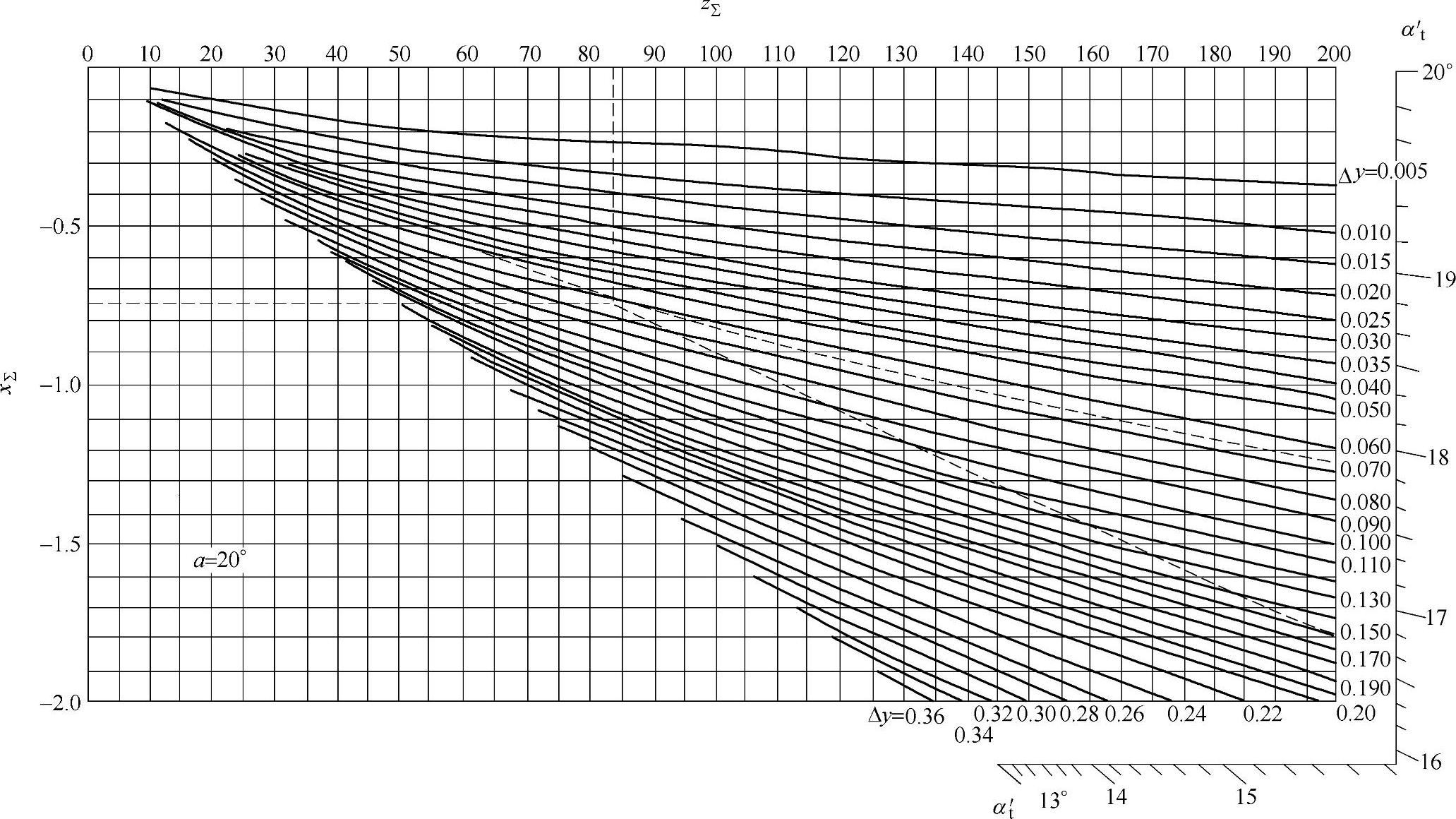
图2-14 当x∑<0时,根据z∑和x∑确定Δy及αt′之线图
例:已知z∑=83,x∑=-0.75,查线图得Δy=0.065和αt′≈16°38′(见图中虚线所示)。
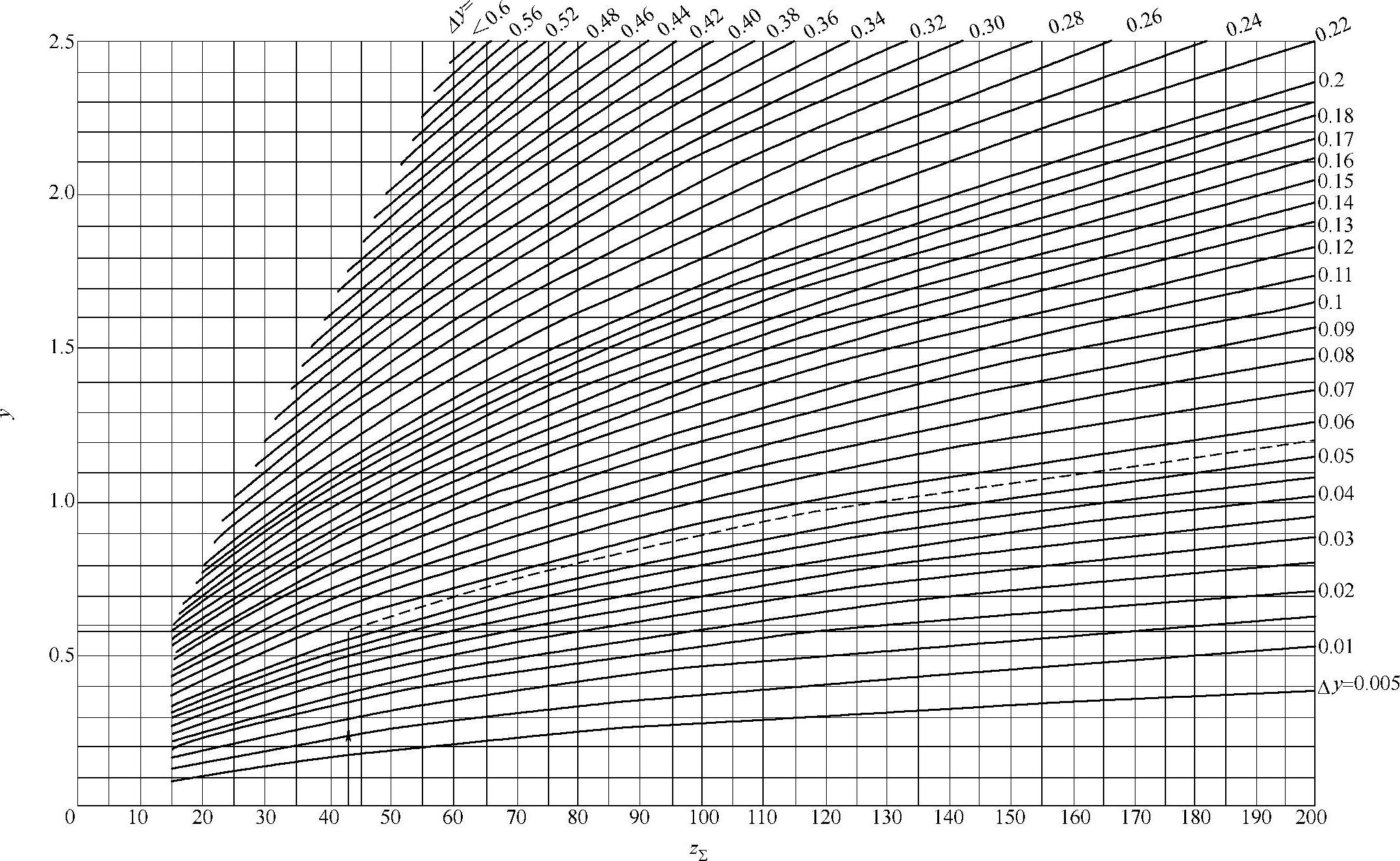
图2-15 当y>0时,根据z∑和y确定Δy值之线图
例:已知z∑=43,y=0.59,查线图得Δy=0.055(见图中虚线所示)。
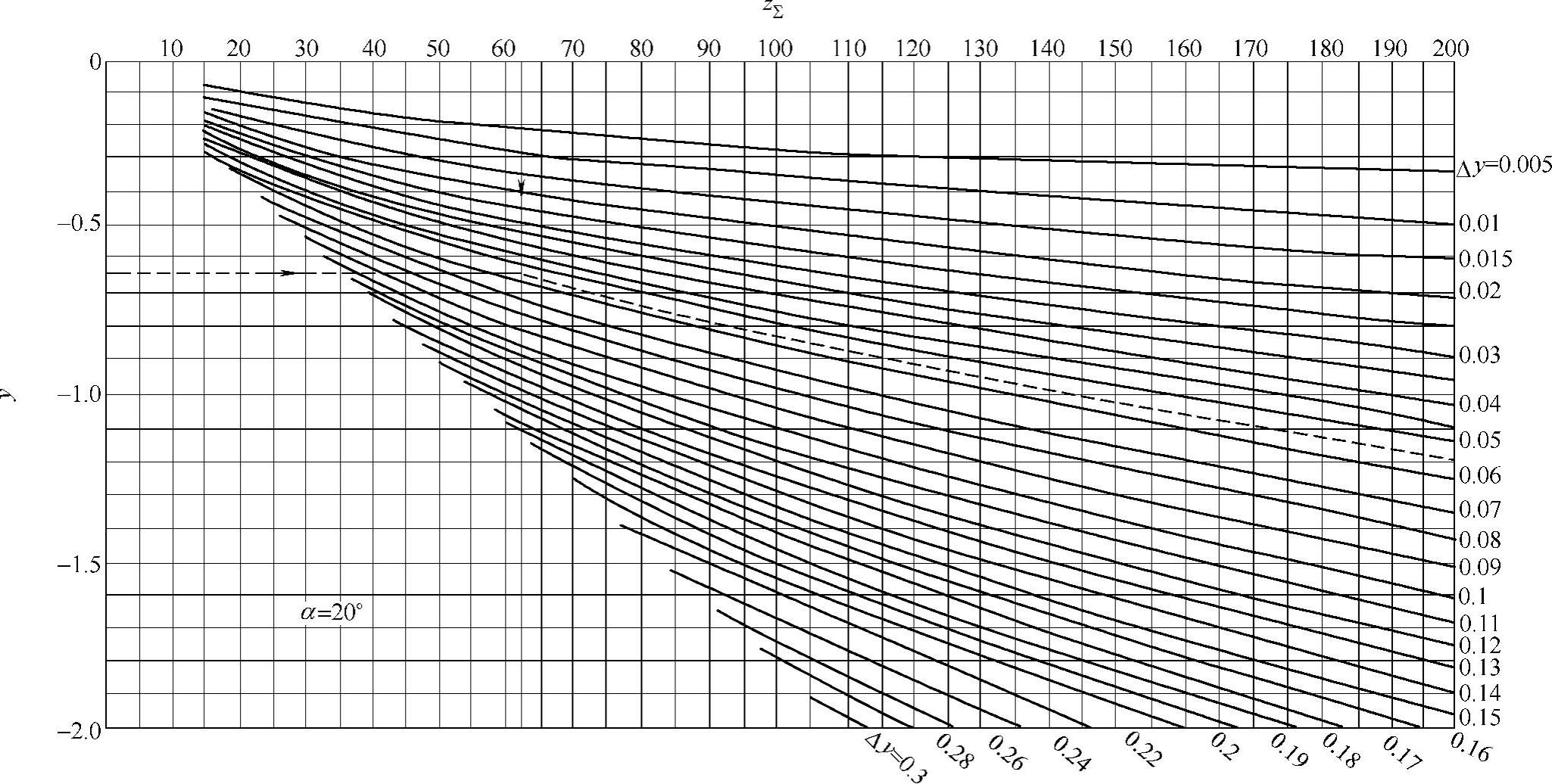
图2-16 当y<0时,根据z∑和y确定Δy值之线图
例:已知z∑=62,y=-0.65,查线图得Δy=0.055(见图中虚线所示)。
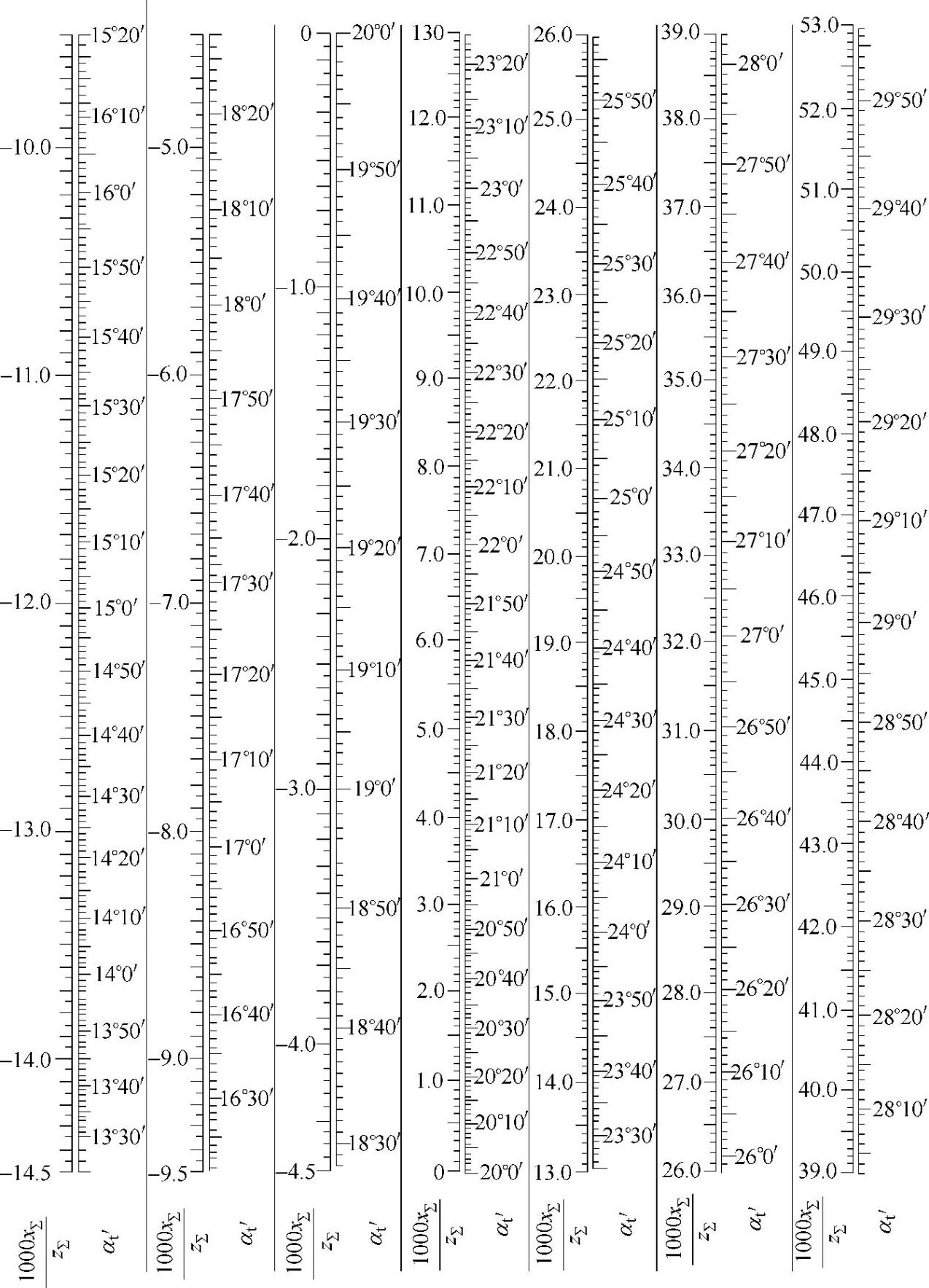
图2-17 当压力角α=20°时,由x∑和z∑来确定端面啮合角αt′之线图
例:已知z∑=59,x∑=1.75,试确定αt′。由 ,查线图得αt′=26°36′。
,查线图得αt′=26°36′。
对斜齿圆柱齿轮传动来说,可分两种情况:
1)已知z∑、x∑及β,求中心距a′。先利用图2-13或图2-14之线图确定Δy值,再按 值和β值,由图2-18之线图确定μ值,然后按下式计算Δyt:
值和β值,由图2-18之线图确定μ值,然后按下式计算Δyt:
Δyt=Δy-μz∑ (2-26)
最后求出中心距变动yt=x∑t-Δy和中心距a′
图2-18 确定斜齿圆柱齿轮计算系数μ的线图
例:已知z∑=49、x∑=1.3、β=18°30′,确定μ值。根据 26.5、β=18°30′,由线图查得μ=0.00027(见图中虚线所示)。
26.5、β=18°30′,由线图查得μ=0.00027(见图中虚线所示)。
a′=a+ytmt=(0.5z∑+x∑t-Δyt)mt (2-27)
2)已知α′、z∑和β,确定x∑t。
先由下式求得
并按y、z∑值由图2-15或图2-16的线图确定Δy值,以及根据 t值与β值,由
t值与β值,由
图2-19 之线图求得ω值,然后由下式确定Δyt:
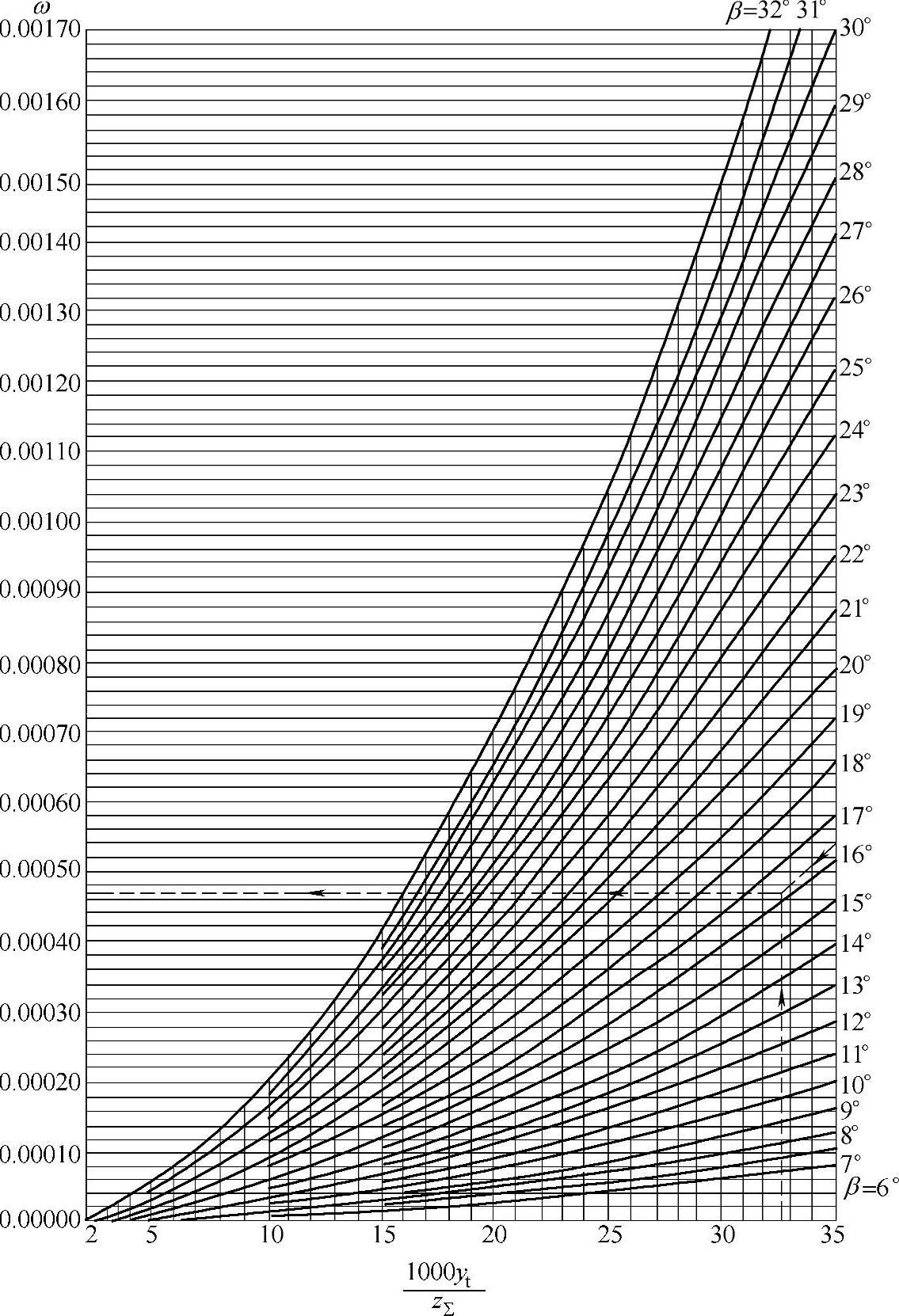
图2-19 确定斜齿圆柱齿轮计算系数ω之线图
例:已知z∑=40、a′=213、β=16°20′、mt=10,确定ω值。根据
 ,查线图得ω=0.00047(见图中虚线所示)。
,查线图得ω=0.00047(见图中虚线所示)。
Δyt=Δy-ωz∑ (2-28)
最后求得总变位系数x∑t
x∑t=yt+Δyt (2-29)
对于行星齿轮传动的变位设计,推荐用线图法进行计算,既方便,又不会算错,即使反复计算也很快。今以2K-H(NGW)型行星齿轮传动为例,说明其计算步骤。
在图2-20所示的行星齿轮传动中,根据传动比要求、同心条件、邻接条件和装配条件等要求,进行初配齿数,得太阳轮齿数za、行星轮齿数z′g、内齿圈齿数zb,然后按下列步骤进行变位计算:
1)确定角变位的行星轮齿数zg
①由小齿轮齿数z1(za或z′g)及齿数比u′ag=z′g(当za>z′g
za
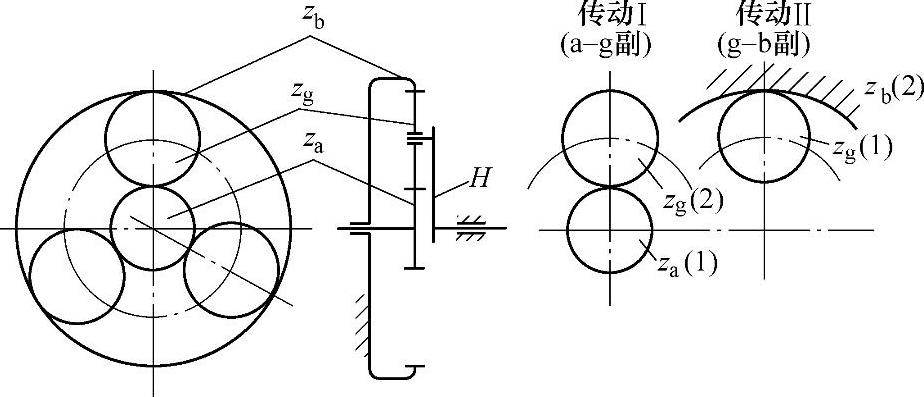
图2-20 2K-H(NGW)型行星齿轮传动简图
时,则 ,查图2-12线图得Δy′值。
,查图2-12线图得Δy′值。
②由z′∑ag=za+z′g及Δy′值,查图2-13或图2-14线图得x′∑ag值。
③zg=z′g-(x′∑ag+0.2),按四舍五入取整数确定行星轮齿数zg。
2)确定实际中心距a′ag
①由z∑ag=za+zg及Δy′查图2-15或图2-16线图得y′值。
②a′ag=aag+y′m,偏小取整数确定实际中心距a′ag。
3)传动副I(a-g副)角变位几何参数的计算
①由z∑ag及 ,查图2-15或图2-16线图,得Δyag值。
,查图2-15或图2-16线图,得Δyag值。
②x∑ag=yag+Δyag
③根据滑动率相等原理,按下式分配变位系数:
式中,当太阳轮相对于行星架是主动时,取ψ=0.08~0.12,通常取ψ=0.10;当太阳轮相对于行星架是从动时,取ψ=0~0.04。
而xg=x∑ag-xa
④按 之值查图2-17线图,得啮合角α′ag。
之值查图2-17线图,得啮合角α′ag。
4)传动副Ⅱ(g-b副)角度变位几何参数的计算
①按同心条件得a′ag=a′gb,由z∑gb=zb-zg及 ,查图2-15或图5-16之线图,得Δygb值。
,查图2-15或图5-16之线图,得Δygb值。
②x∑gb=xb-xg=ygb+Δygb
③xb=x∑gb+xg(xg采用a-g副计算确定的数值)。
④根据 ,查图2-17线图,得啮合角α′gb。
,查图2-17线图,得啮合角α′gb。
在行星齿轮传动中,由行星齿轮传动的同心条件得知,两对啮合副(a-g副,g-b副)的中心距必须相等,即a′ag=a′gb。因此,传动副I(a-g副)采用较大的正角度变位,传动副Ⅱ(g-b副)也必然是大的正角度变位。这时,内齿圈的变位系数xb较大,会过于削弱内齿圈的弯曲强度,这是不利的。通常,将初定的行星轮齿数zg′减少1~2个齿,再进行角度变位,这样可使a-g副具有尽可能大的正角度变位,其啮合角α′ag=22°~26°,而g-b副为高度变位或负角度变位,啮合角α′gb=17°~20°为宜。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





