运动控制CPU的性能可与PLC自身CPU相比的运动控制模块。除了按预定程序要求,向模块的脉冲输出口,发送要求的脉冲量;同时它还有脉冲量读入端,可接收脉冲反馈信号;此外还有开关量控制功能。
由于它可获得脉冲反馈信号,故可使用交流伺服电动机,用闭环的方法,实现运动控制。从而可获得更好的运动控制效果。由于它还有开关量控制功能,故在进行运动控制的同时,还可进行开关量控制。
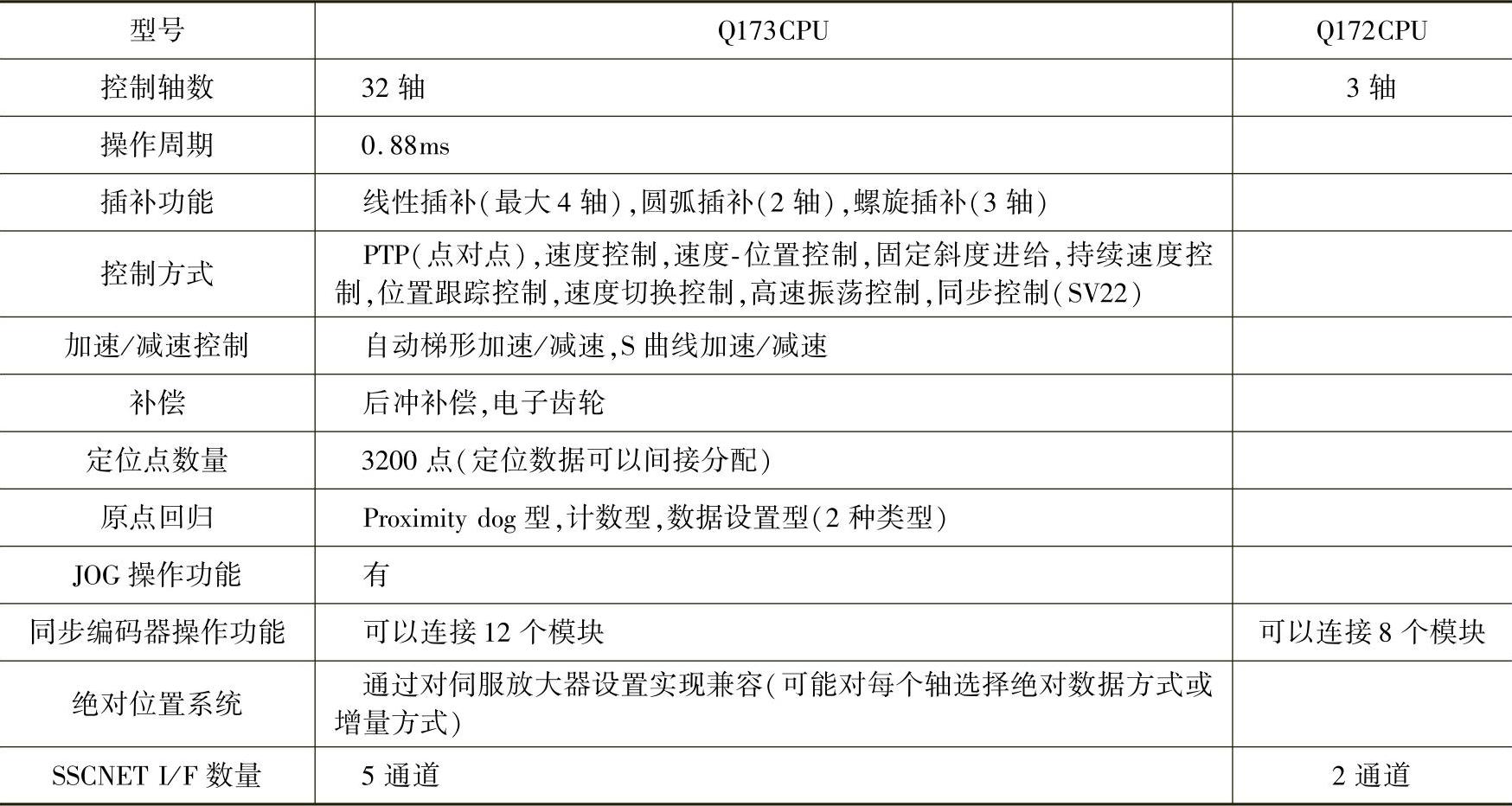
三菱PLC的运动CPU有:Q172CPU及Q173CPU。前者为8轴,后者为32轴。其性能参数见表4-32。
表4-32 Q运动控制器性能参数
它可以和PLC CPU安装在同一基板上,配置成多CPU系统。最多可采用4个CPU(包括一个PLC CPU,3个运动控制CPU)。这样一个系统最多可以控制96轴。(www.daowen.com)
运动控制CPU通过三菱伺服系统控制网络SSCNETⅢ(Servo System Controller Network)的专用高速总线与伺服放大器连接。它的通信速度已高达50Mbit/s,是第一代SSCNET的9倍(SS-CENT 5.625Mbit/s)。通信距离最长可达800m,是第一代SSCNET的26倍(SSCENT 30m)。通信周期也由原来的0.88ms提高到现在的0.44ms。在SSCNETⅢ中没有脉冲指令频率的限制,控制器和伺服放大器能做到完全同步,大大提高定位控制的准确性。SSCNETⅢ的使用可节省连线,便于伺服系统的网络化管理。同时采用光缆,抗噪声能力显著提高。
SSCNETⅢ与三菱电机的最新伺服放大器MR-J3配合使用,可实现高速度(HF-KP系列电机,最高转速6000r/min)和高精度(HF-KP系列电动机,分辨率:262144p/r),进行更加高速的平滑控制。
运动控制CPU使用独特的Motion SFC语言编程,具有可视性。实际的运动顺序在程序上直接反映出来,易于组织程序结构并通过监控工具进行调试。可知,使用运动控制CPU的编程也不是一般PLC意义上的编程,也是另一个专门的课题。所以也不便再进一步讨论了。
此外,西门子新推出的CPU 317T-2 DP也称为运动控制PLC。可实现2~8轴的控制(最多可达16轴)的运动控制。
再,有的中小型机,也可专用与运动控制,如欧姆龙的CJ1、2M以及CP1H的Y型机。这类PLC配置有较多的脉冲输入、输出点及相应的脉冲输入、输出处理指令。如CJ2M机可配置4组三相脉冲输入及四组不同脉冲(正反向脉冲或脉冲加正反方向控制)输出,同时还可配置4组可调制脉宽的脉冲输出。因而可方便地实现多轴的运动控制要求。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






