物体运动最多有6个自由度,3个移动和3个转动。独立运动控制是指在各自由度上的运动互不相关,彼此独立。对这样运动系统,不管有多少轴,都可看成单轴(自由度或坐标)运动。其控制较简单。只是使运动部件从某位置出发,在一个坐标(轴)上,按要求的速度移动到另一个位置。或从某位置出发,在一个坐标(轴)上,先加速运动,到目标速度后,以不变的速度继续运动,快到终点时,先减速,到终点时停止,或稍停后以新的速度向新目标运动,或直接以新的速度向新目标运动等。
如果为双轴或多轴的,也简单。只是单轴控制的简单重复。
此类运动控制也称点位控制。在PCB钻床、SMT、晶片自动输送、IC插装机、引线焊接机、纸板运送机驱动、包装系统、码垛机、激光内雕机、激光划片机、坐标检验、激光测量与逆向工程、键盘测试、来料检验、显微仪、定位控制、PCB测试、焊点超声扫描检测、自动织袋机、地毯编织机、定长剪切,折弯机控制应用程序指令、运动指令、反馈元件电路板特型铣、晶片切割机等,都有它的应用。
1.单段位置控制
在单轴(某个坐标)上,当工作命令发出后,可使部件按指定速度(指定脉冲频率),完成指定位移量(指定脉冲数)的位移,即这里称的“位置控制”。组成这样系统的硬件可以是:小型PLC、步进电动机及配套设施与运动部件。PLC则是通过运行程序,用脉冲输出口设施这个控制。
图4-65所示即为PLC实现这个控制的程序。其作用是当“工作”ON后,将使脉冲输出口发出1000个,频率为每秒10次的脉冲。进而使运动部件产生相应于1000个脉冲当量的运动。程序的算法是:先传送控制数据进行,然后执行相关脉冲输出指令。
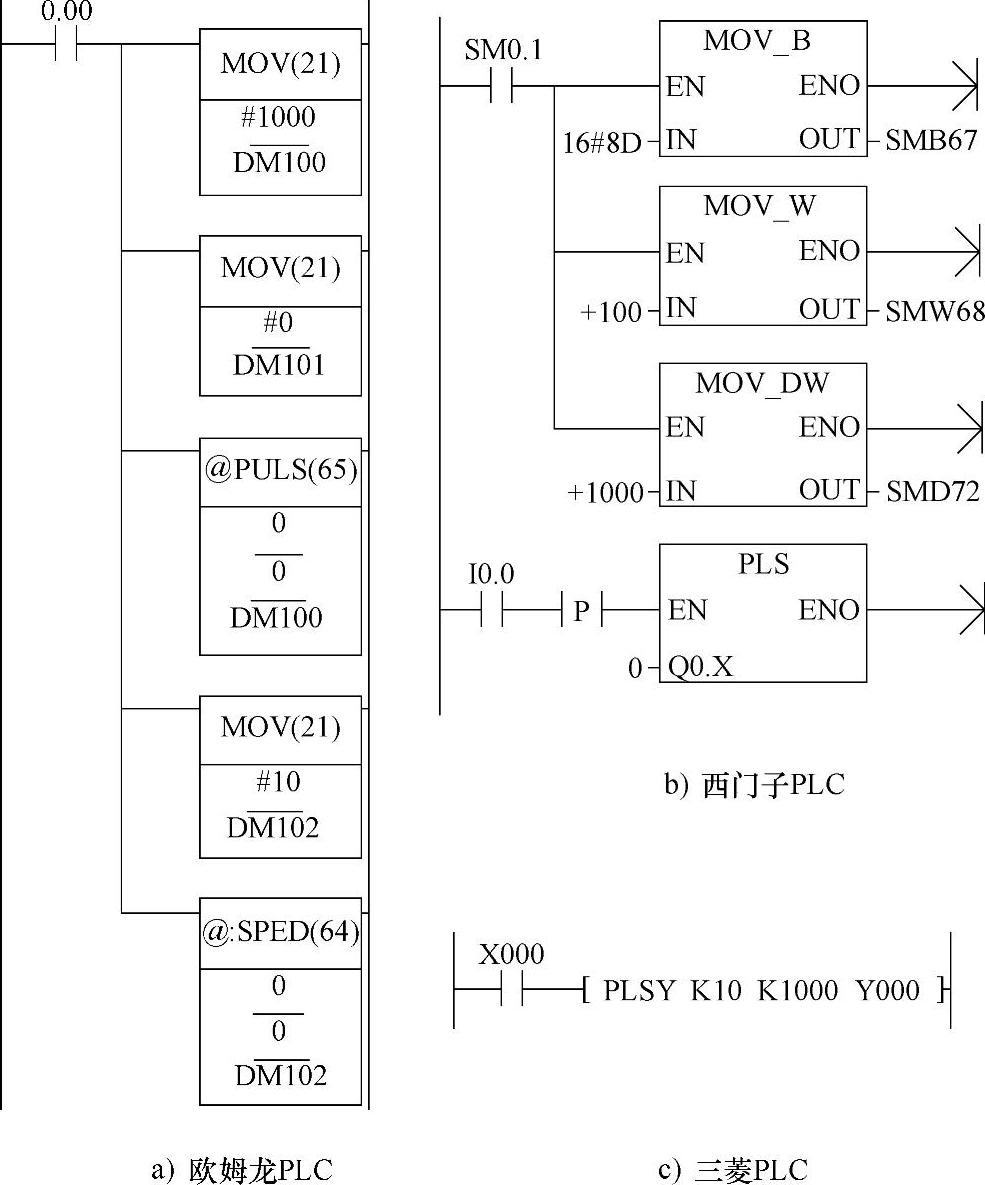
图4-65 位置控制程序
图4-65a为CPM2A用的程序。它先把1000个脉冲数传送给DM101(高位)、DM100(低位)。然后微分执行“PULS”指令,选择010.00为脉冲发送口,选择独立工作模式,选择用DM101(高位、0)、DM100(低位、1000)确定脉冲数。再把10传送给DM102,并执行“SPED”指令,选择010.00为脉冲发送口,选择独立工作模式,选择用DM102确定脉冲频率。显然,根据这组指令,即可使PLC向10.00口发出频率为10的1000个脉冲,进而使部件按上述要求运动。
图4-65b为S7-200的程序。它先对SM67设定,设为16#8D,指定单段PTO输出。使用Q0.0口输出脉冲,其输出周期设定为100ms(频率为10Hz),脉冲数为1000。
图4-65c为FX2N的程序。它使用Y000口输出脉冲,参数为即时数。指定输出出频率为10Hz,脉冲数为1000。
提示:CPM2A的PLUS及SPED指令,S7-200的PLS指令微分执行,即可按设定的脉冲数输出脉冲。如一直执行,则不受脉冲数设定限制,将一直发送脉冲。当指令停止执行,还得把设定的脉冲发送完毕后,才停止发送脉冲。
提示:与上不同,FX2N的“PLSY”指令必须连续执行,一旦停止执行,即使指定的脉冲数没有发送完毕,也不再发送脉冲。但是,一旦又恢复执行,脉冲将继续发送,直到设定脉冲数发送完毕。
2.加、减速度及位置控制
在单轴(某个坐标)上,当工作命令发出后,为了工作平稳,可使部件按指定的加速度(指定脉冲频率增加率或指定加速时间),指定的目标速度(指定输出脉冲频率),指定减速度(指定脉冲频减小率或指定减速时间),完成指定位移量(指定脉冲数)的位移,即这里称的“加、减速度运动控制”。组成这样系统的硬件也可是:小型PLC、步进电动机及配套设施与运动部件。PLC则是通过运行程序,用脉冲输出口设施这个控制。
图4-66所示为加、减速度位置控制的一个例子。它要求用5s时间,把输出脉冲频率增加到100Hz,减速时则是用5s时间,从100Hz减速到最小频率。
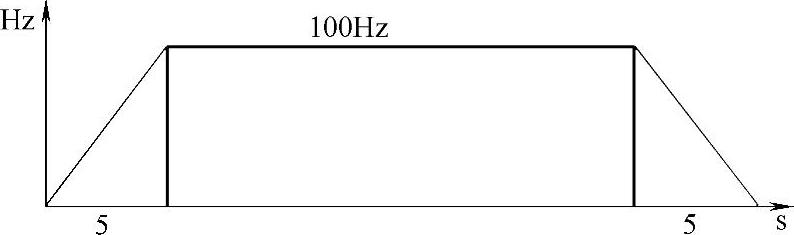
图4-66 输出频率变化简图
图4-67所示即为相关PLC实现这个控制的程序。其作用是当“工作”ON后,将使脉冲输出频率逐渐增加,5s后达100Hz。输出脉冲总数20000个。当发送脉冲接近时,减速,于5s后减速到最小值,并停止发送。程序的算法也是:先传送控制数据进行设定,然后执行相关脉冲输出指令。
图4-67a为CPM2A用的程序。它先把20传送给DM101(高位)、0传给DM100(低位)。然后微分执行“PULS”指令,选择010.00为脉冲发送口,选择独立工作模式,选择用DM101、DM100确定脉冲数(即指定20000个脉冲)。再把20传送给DM110,把100传送给DM111,把20传送给DM112,并执行“ACC”指令,选择010.00为脉冲发送口,选择独立工作模式,选择用DM110确定脉冲频率增加率(即指定脉冲频率增加率为20),选择用DM111确定脉冲频率(即指定脉冲频率为100),选择用DM112确定脉冲频率减小率(即指定脉冲频率减小率为20)。显然,根据这组指令,即可使PLC向10.00口发出脉冲,进而使部件按上述要求运动。
图4-67b为S7-200的程序。先是执行初始化程序,数据传送,进行设定。VB67设定值为十六进制数A8,意即多段脉冲输出,时基为毫秒。VD168设定值为500,意即多段输出偏移数为500。VB500(偏移指定开始地址)设定值为3,意即选定3段输出。VW501设定值为2510,意即选定第1段周期为2510ms。VW503设定值为-10,意即选定第1段每发一个脉冲周期减小为10ms。VD505设定值为250,意即选定第1段发送250个脉冲……之后,当I0.0ON则执行PLS指令,将按上述设定,先是加速发送250个脉冲,进而等速率(周期100ms)发送19500个脉冲,最后减速率发送250个脉冲。也可实现上述要求。
图4-67c为FX2N的程序。它使用Y001口输出脉冲,参数为即时数,不必数据赋值。指定输出出频率为100Hz,脉冲数为20000,加、减频率时间为5000ms,即5s。
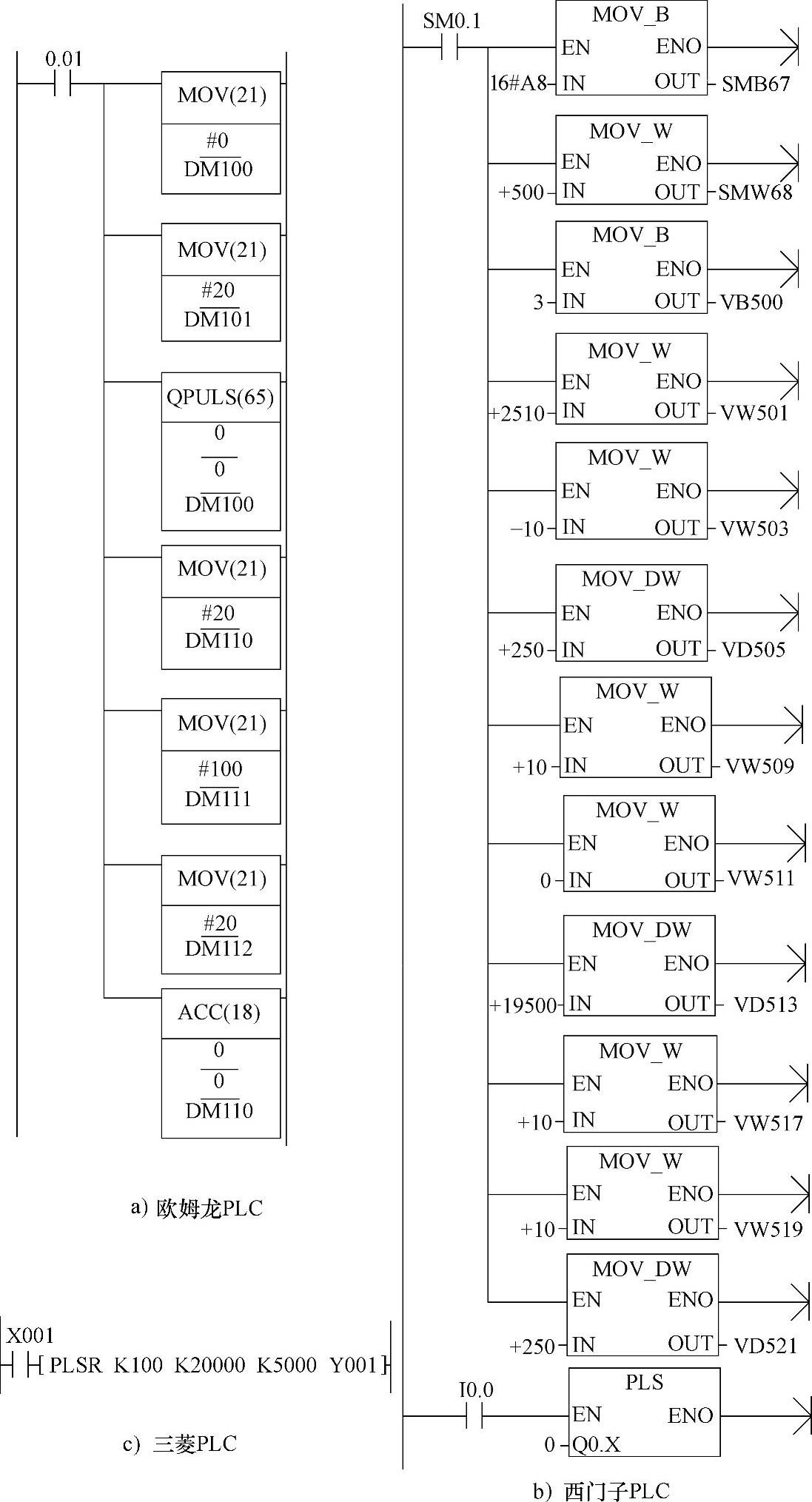
图4-67 加、减速度位置控制程序
提示:相关PLC都可实现上述运动要求。图4-67c最简单,但它的加速率与减速率,只能设为相等,不够灵活。
提示:相关PLC频率设定上是有区别的。图4-67a都是按脉冲频率设定。图4-67b都是按脉冲周期设定。而图4-67b,等速发送是按频率设定,但加、减速是按时间设定。为此,要实现同一要求,须作相应的换算。而且以本程序为例,为了简化,在可实现上述运动要求时,还是略有差别的。图4-67a开始频率为0,图4-67b开始周期为2510(周期不能为无穷大,最大可设为65535,这里便于计算设为这个值),而图4-67b开始频率由本章第2节式(4-1)计算确定(实际不必计算,自然形成的)。
3.多段位置控制
以上介绍的运动控制程序只能做一次位移。如果要多次位移怎么办?它的算法是先设定第1段数据,并启动第1段位移,待第1段完成后,开始第2段设定,再启动第2段位移……直到所有位移完毕。
图4-68所示为2段位置控制简图。起动后先以频率20Hz发送20000个脉冲,之后,停留2s,再以频率10Hz发送10000个脉冲。

图4-68 2段位置控制简图
实现这个控制算法的要点是:传送脉冲数及要求频率数据;使用脉冲输出指令;判断第1段是否到位,如到位,再传送脉冲数及要求频率数据;再使用脉冲输出指令,直到控制完成。图4-69所示为实现此算法,与图4-68对应的相关PLC程序。
图4-69a为CPM2A机程序。参照图示,其中:
①启动逻辑。(www.daowen.com)
②把脉冲数20000的20传送给DM5(高位)、DM4(低位)。
③把脉冲频率20传送给DM6(单位为10Hz,故传送2)。
④进行第1段输出脉冲与要求脉冲数比较,判断是否到位。由于CPM2A没有脉冲输出完成的标志,这里用硬件把输出脉冲信号输入给高速计数器(000.00点设为进行高速计数)。而特殊继电器248、249则记录着采集的脉冲数。故这里把248、249与设定脉冲数进行比较。
⑤如比较相等,则LR0.00置位。
⑥微分执行“PULS”指令,选择010.01为脉冲发送口,选择独立工作模式,选择用DM4、5确定脉冲数。
⑦微分执行“SPED”指令,选择010.01为脉冲发送口,选择独立工作模式,选择用DM6确定脉冲频率。
⑧如到位,延时2s,作第2段控制,情况同第1段。
⑨启动第2段程序。
⑩复位LR0.00。
提示:欧姆龙PLC没有检测设定的脉冲数是否发送完毕的标志。除了使用上述检测脉冲反馈的方法,还可用定时器或定时中断进行控制。
图4-69b为S7-200程序。它由两部分,主程序及中断程序,组成。参照图示,其中:
①初始化,停止Q0.0正常输出,并起动第1段脉冲输出。
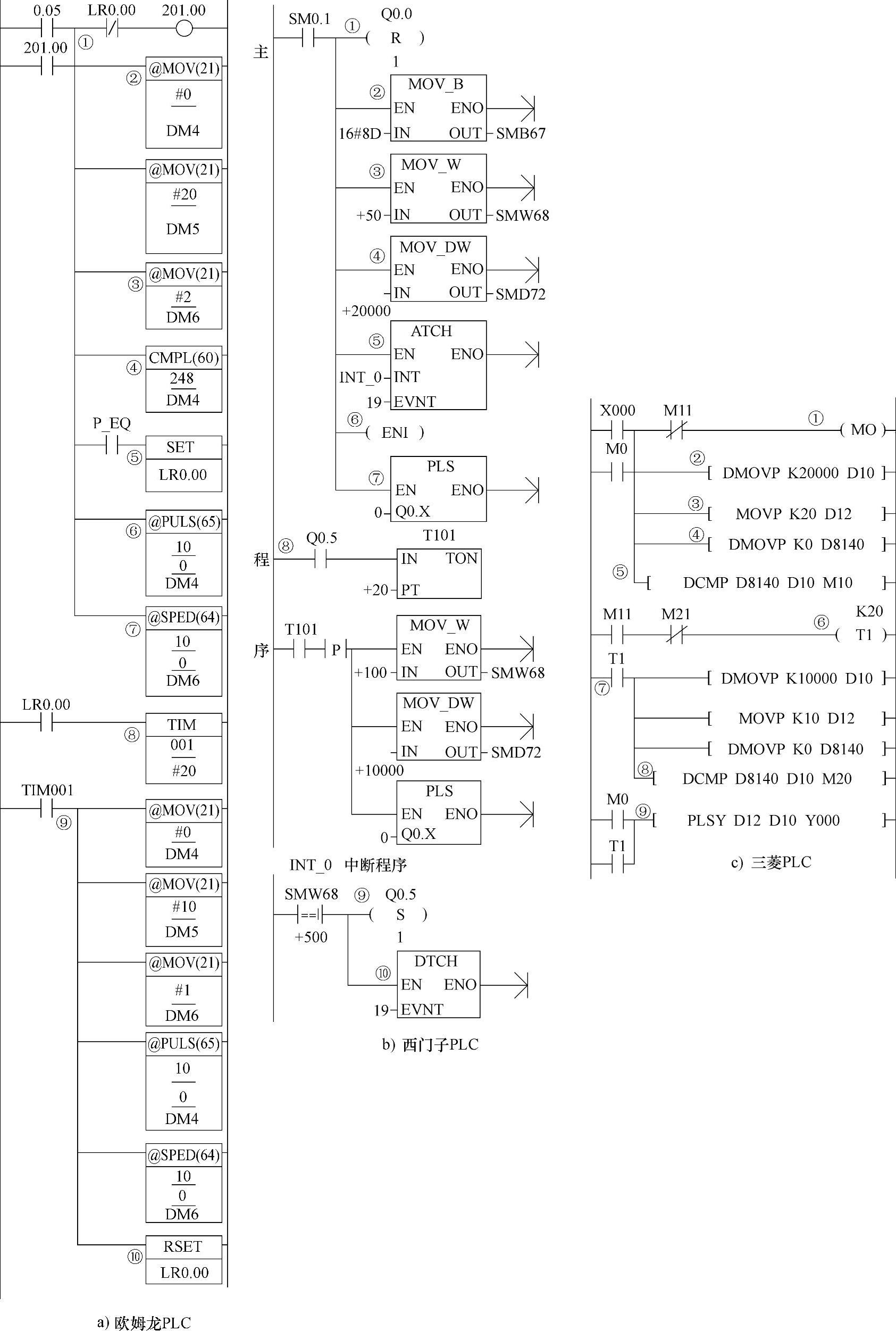
图4-69 2段位置控制PLC程序
②设定脉冲输出模式为PTO。
③设定脉冲周期为50ms(频率20Hz)。
④设定输出脉冲数为20000。
⑤设定脉冲发送完成中断事件19与中断子程序1关联,即当脉冲发送完成,可调用中断子程序1。
⑥开中断。
⑦执行“PLS”指令,选择口0,即Q0.0,输出脉冲。
⑧定时程序,再设定频率、脉冲数,并重新微分执行“PLS”指令,进行第2段控制。
⑨当脉冲发送完毕,执行中断程序0,使Q0.5置位。
⑩中断关联解除。当地2段脉冲发送完毕,不再执行此中断程序。
图4-69c为FX2N机程序。参照图示,其中:
①启动逻辑。
②把脉冲数20000的20传送给D11(高位)、DM10(低位)。
③把脉冲频率20传送给D12(单位为1Hz,故传送20)。
④进行第1段输出脉冲与要求脉冲数比较,判断是否到位。由于FX2N的特殊寄存器D8140、8141存的是Y000已输出的脉冲数,用它与设定数比较。
⑤如D8140、8141等于D10、11,则M11 ON。
⑥把脉冲数10000的20传送给D11(高位)、DM10(低位)。
⑦把脉冲频率10传送给D12(单位为1Hz,故传送20)。
⑧进行第2段输出脉冲与要求脉冲数比较,判断是否到位。如D8140、8141等于D10、11,则M21 ON,使电路复原。
⑨启动脉冲输出。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




