1.适应控制(AdaptiveControl)概念
适应原为生物学的术语。指的是生物能改变自己的习性以适应新的环境的一种特征。自适应控制是指这样的控制,它能不断地检测系统的信息,自动调整控制的参数以及算法、结构,以适应环境条件或过程参数的变化,以使系统始终具有较高的控制性能。
适应控制所依据的是系统在线辨识及自身调整。即在系统的运行过程中,依据对象的输入、输出数据,不断地辨识系统。使控制变得越来越准确,越来越接近于实际。
如当系统在设计阶段,由于对象特性的初始信息比较缺乏,系统在刚投入运行时可能不理想。但在实施控制的同时,进行在线辨识及自身调整,控制系统逐渐适应,最终将调整到一个满意的工作状态。再比如某些控制对象,其特性可能在运行过程中要发生较大的变化,但通过在线辨识和改变控制器参数,系统也能逐渐适应。
对哪些对象特性或扰动特性变化范围很大,同时又要求经常保持高性能指标的一类系统,采取自适应控制是合适的。
图3-98所示为自适应控制系统的结构。
从图3-98可知,它比普通的反馈控制系统增加了一个适应控制回路。自适应控制器根据受控对象的输入、输出关系,辨识受控对象和外部干扰的特性。随后根据辨识的结果校正反馈控制规律,以适应环境特性的变化。无论辨识,还是控制规律的设计,都可采用不同的方法。它们的不同组合能形成适应控制的不同方案。
2.适应控制特点
如果自动调节对付的是输入的干扰,而自适应控制对付的是整个环境的干扰。与常规反馈控制相比,有以下特点:①能辨识环境条件过程参数的变化,建立被控过程的模型;②在辨识的基础上能综合一种新的控制算法;③根据综合出的控制策略自动地修正控制器参数值。
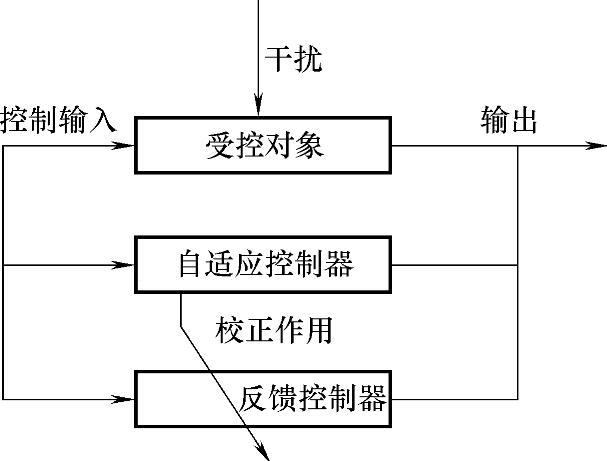
图3-98 自适应控制系统结构
3.适应控制发展
适应控制系统主要类型有:自校正控制系统、模型参考适应控制和自寻最优控制系统。
自校正调节器具有对系统或控制器参数进行在线估计的能力,可通过实时地识别系统和环境的变化来相应地自动修改参数,使闭环控制系统达到期望的性能指标或控制目标,有一定的适应性。(https://www.daowen.com)
在经典控制理论和最优控制理论中,控制器的设计方法是建立在系统数学模型不变或事先已知的基础上的。但很多实际系统的数学模型是无法确切了解的,并且随着环境变化系统特性也在改变。因此通常的非适应控制技术不能在线建立数学模型,也不能实时调整系统的参数。
为了克服通常的控制技术的这些缺点,R.卡尔曼于1958年提出自校正调节器的设想。但由于当时适应控制理论尚未充分发展,又缺乏适用的计算机,卡尔曼的设想未能得到进一步的发展,更未能付诸实施。
1970年,V.彼特卡把自校正调节器的理论研究推广到随机情况。其后,随着随机控制理论、系统辨识理论和计算机技术的发展,自校正调节器的研究和应用迅速发展起来。
1973年,K.J.阿斯特勒姆和B.维滕马克提出一种简易可行的自校正调节器实现方案,引起广泛重视。在这个方案中,用一个表示输入输出关系的线性差分方程(可以包含干扰项)作为系统的预测数学模型(称为可控自回归滑动平均模型,缩写为CARMA),用递推最小二乘法在线估计模型的参数,直接得到一个输出方差最小的自校正调节器。这种方案中系统的组成结构简单,容易实现,并易于在工业过程控制中推广。它的缺点是对于非最小相位系统控制过程可能发散。
1975年,D.W.克拉克和P.J.高思罗普又提出广义输出最小方差的自校正调节器方案,不但能限制控制输入的幅度,还能限制输出与设定值之间的误差,能同时用于最小相位系统和非最小相位系统。
1979年,P.E.韦尔斯泰德等人提出具有零极点配置功能的自校正调节器,能够在线整定系统或控制器的参数,使闭环系统的零点和极点配置到指定部位上去。随后,针对各种不同性质的系统(多变量系统、非线性系统、分布参数系统、时变系统和连续系统等)提出了相应的自校正调节器方案。此外,还出现了一些专用性的自校正调节器,如自校正LQG(线性二次高斯)调节器,自校正PID(比例积分微分)调节器等。
在工作原理上,自校正调节器是以分离原理为依据的,把参数的估计和控制律的计算分开进行。参数估计采用递推方法,计算量较小,易于用计算机实现。自校正调节器已在不少工程技术领域(如造纸、化工、冶金、水泥、热力、船舶和飞机的自动驾驶装置、机械手等)中被采用,取得了较好效果。
适应控制系统主要用于过程模型未知或过程模型结构已知和参数未知且随机的系统中控制器参数的调整。
近年来,对适应控制的研究,大都建立在系统是逆稳定的基础上。而且在适应控制器中由Riccati方程确定的量。近期,有人通过对“一步超前”适应控制器的分析,提出“输入匹配”方法,将系统的信号跟踪问题转化为对系统输入的研究。还有人用随机梯度算法,建立了关于“输入匹配”全局收敛的“一步超前”最优适应控制器。又有人建立了随机系统“一步超前”最优适应控制的最小二乘算法,估计出由该算法辨识系统参数的收敛速率。适应控制系统的进一步发展,将走向“自学习”系统和“智能控制”系统。
4.适应控制应用
适应控制在PLC控制中可设想的应用大体是,在控制算法上,如有几个算法可适用各种不同的“环境情况”。那么,系统工作时,在可检测反馈量的同时,还要检测这个“环境情况”,并依检测的“环境情况”的不同或变化,而选择控制的算法。以使系统的控制达到最好的效果。
不仅在算法上,其他的,如控制结构、控制参数,也都可准备多种方案,供系统“环境情况”变化时选择,以使系统能“适应”“环境变化”,始终能在最佳的状态下工作。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





