1.PID功能块
LM机不仅有微分、积分功能块,还有PID控制功能块。目前,多数PLC也多有类似的PID指令、函数块、功能块、单元或回路控制单元。所以可不必使用前文所示的程序而直接调用这些指令、功能块、单元或回路控制单元进行PID控制,则更为方便。
图3-81所示为LM机PID功能块梯形图符号。其有关参数说明见表3-16。该功能块对输入的数值进行比例、积分、微分控制。计算公式为
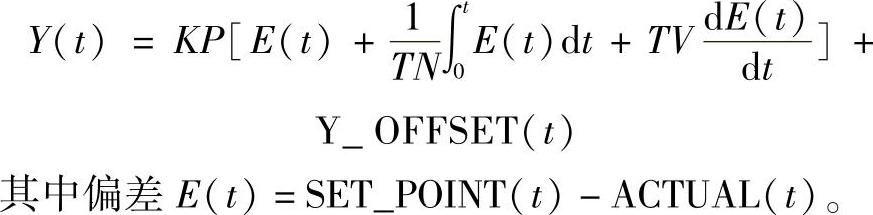
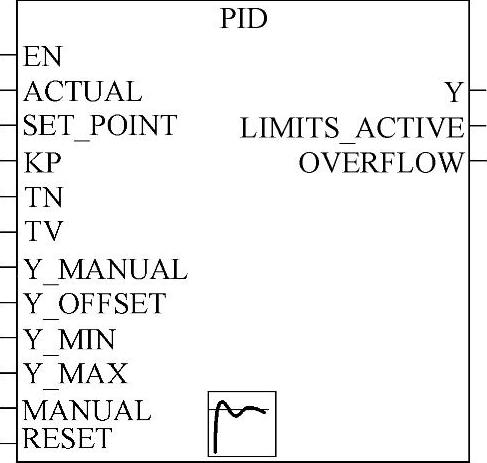
图3-81 和利时LM机PID功能块
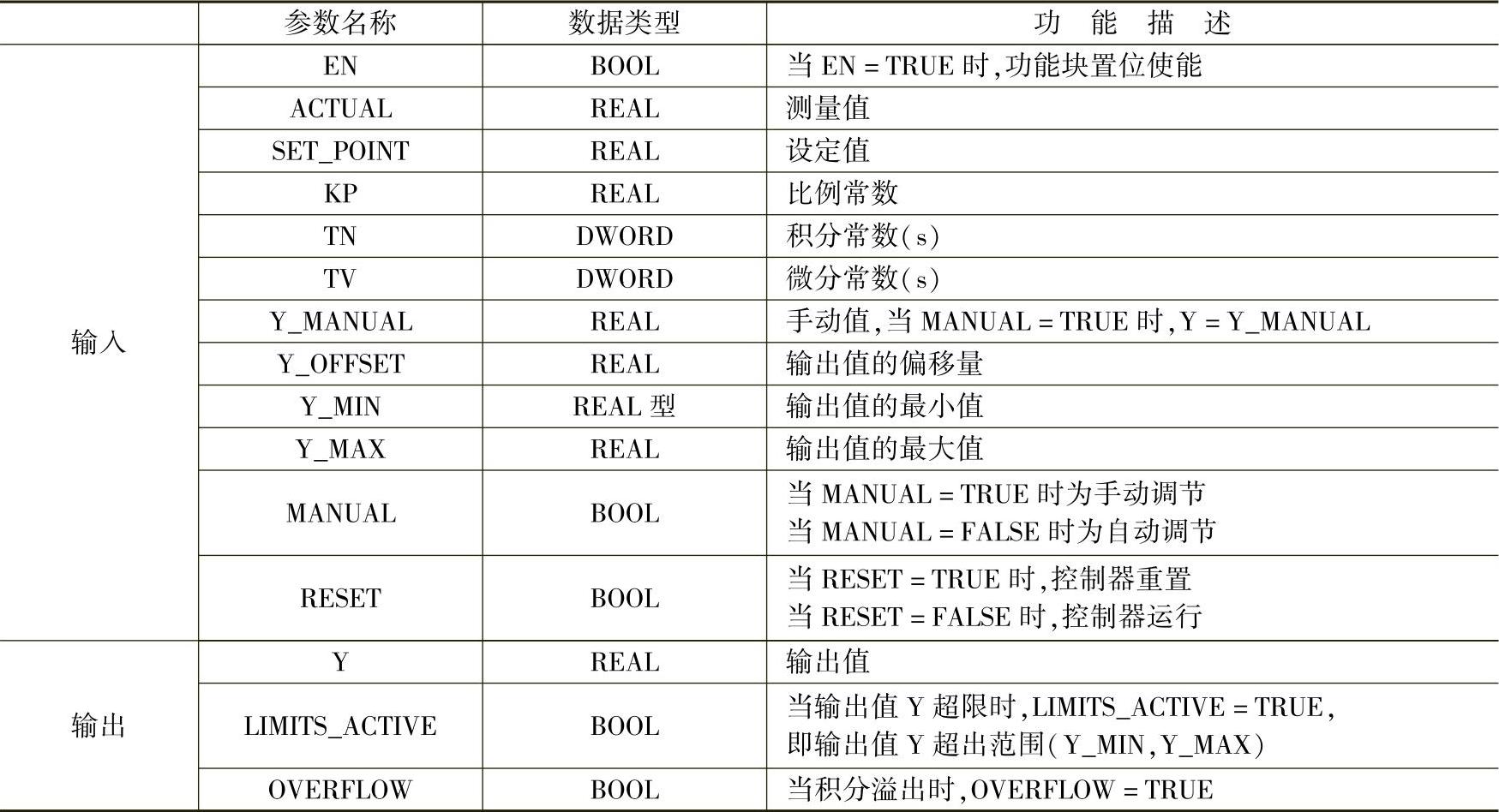
表3-16 PID功能块参数说明
2.PID功能块调用
有了PID功能块,编写模拟量控制程序是比较简单的。在进行PLC系统配置后,其主要编程工作有:
调用模拟输入、输出功能块,激活这些模块的功能。
利用模拟量输入通道地址,采集模拟量值,并作必要的数值转换。
利用设定值与模拟量输入值计算偏差值。
调用定时功能块,生成脉冲控制信号,以控制PID计算节奏。
调用PID功能块,并初步设定控制参数。(https://www.daowen.com)
将PID控制输出作必要的数值转换,传送给模拟量输出通道。
在现场的实际程序调试中,最后整定PID参数。
因为现场的情况比较复杂,特别要牵涉到动力学问题,不好在此具体介绍。以下仅用正弦函数规律的偏差信号,进行PID控制为例,用PowerPro编程软件的视图,观察这个控制输出的变化。
这个程序的变量,声明如下:
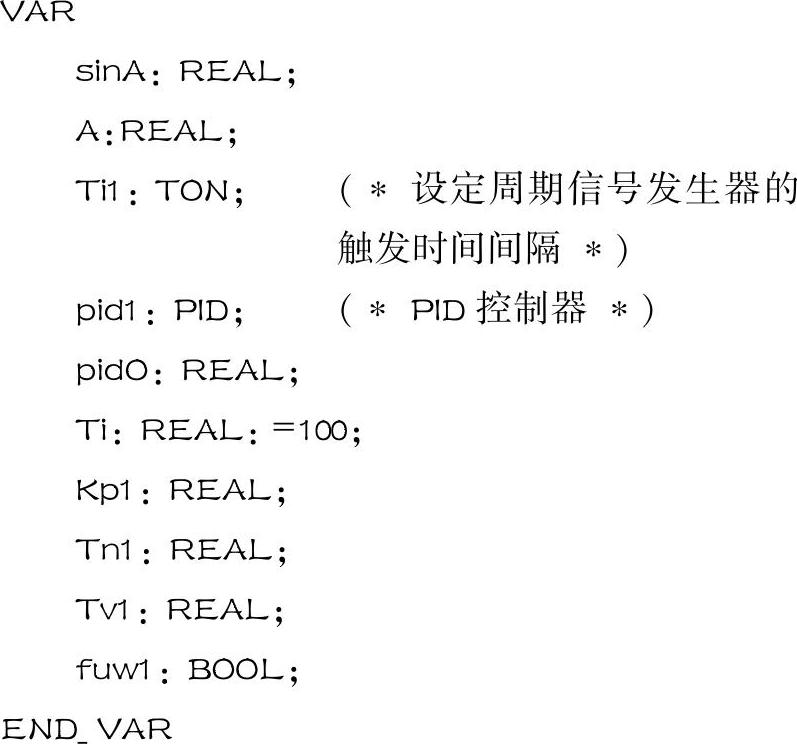
其梯形图程序如图3-82所示。图中节1为调用定时功能块,生成100ms的脉冲信号,以控制PID运算节奏。这个时间间隔是用好PID控制首先要处理好参数,是很关键的。节2位进行正弦偏差信号生成。节3为调用PID功能块。
图3-83所示是当误差(Er)按正弦规律变化时,PID功能块输出的情况,是使用PowerPro的视图监视的。从图3-83可知,误差如按正弦函数规律变化,如用PID控制,其控制输出是比例、积分、微分共同作用的结果。
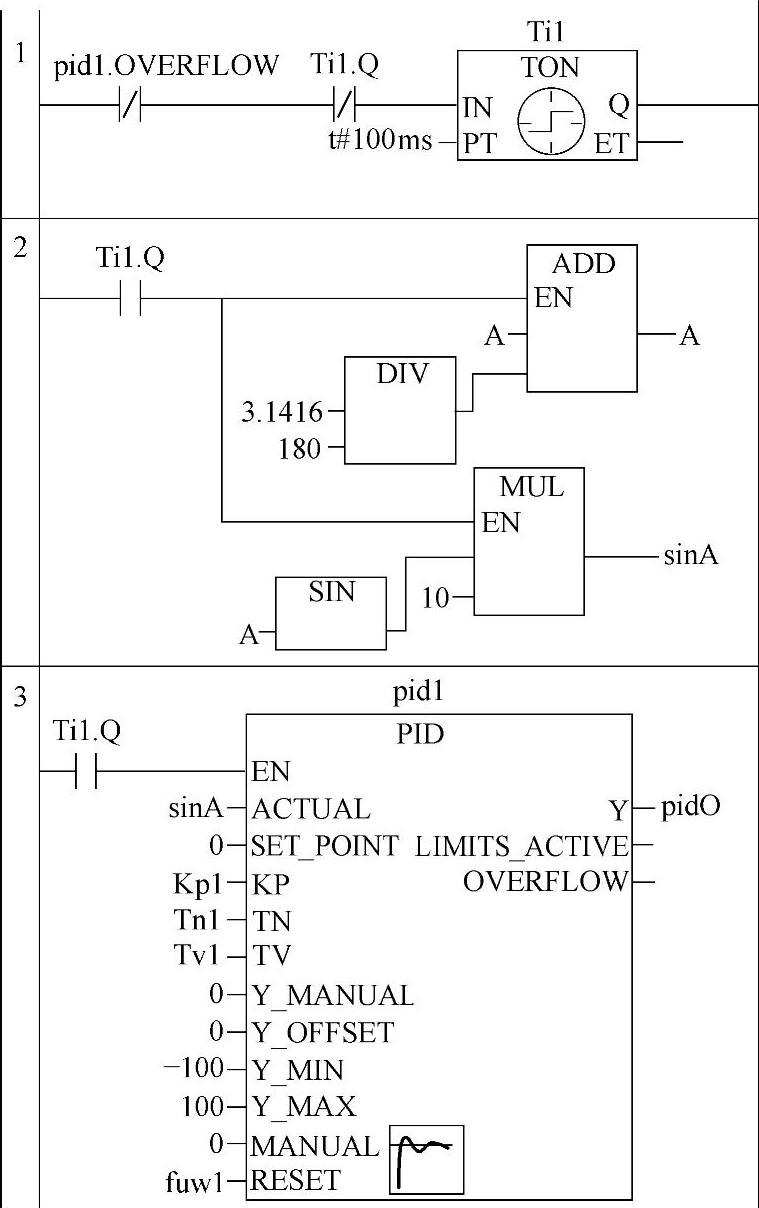
图3-82 PID功能块调用程序
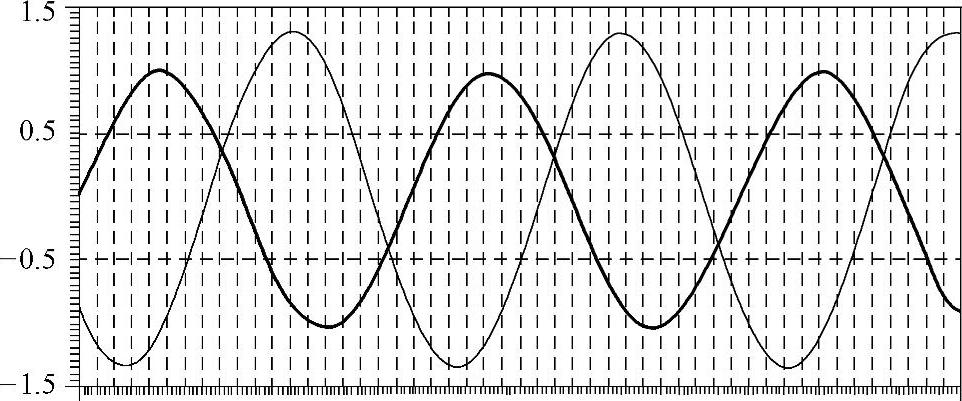
图3-83 执行PID功能块后的sinA及PIDO的图形显示
 sinA误差Er按正弦函数变化;
sinA误差Er按正弦函数变化; PID控制输出
PID控制输出
注:本图只是示出变化趋势,横坐标为时间轴,坐标单位未标明。
在应用PID控制时,要处理好一些问题同以上其他PLC功能块类似,具体略。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







