作为控制原理,它的PID算法与FX机完全是相同的。它的PID控制框图如图3-65所示。
与其他厂商PLC一样,PLC运算总是取决于采样周期。周期间隔时间到,而PID指令又处于运行状态,才执行PID运算。其过程如图3-66所示。
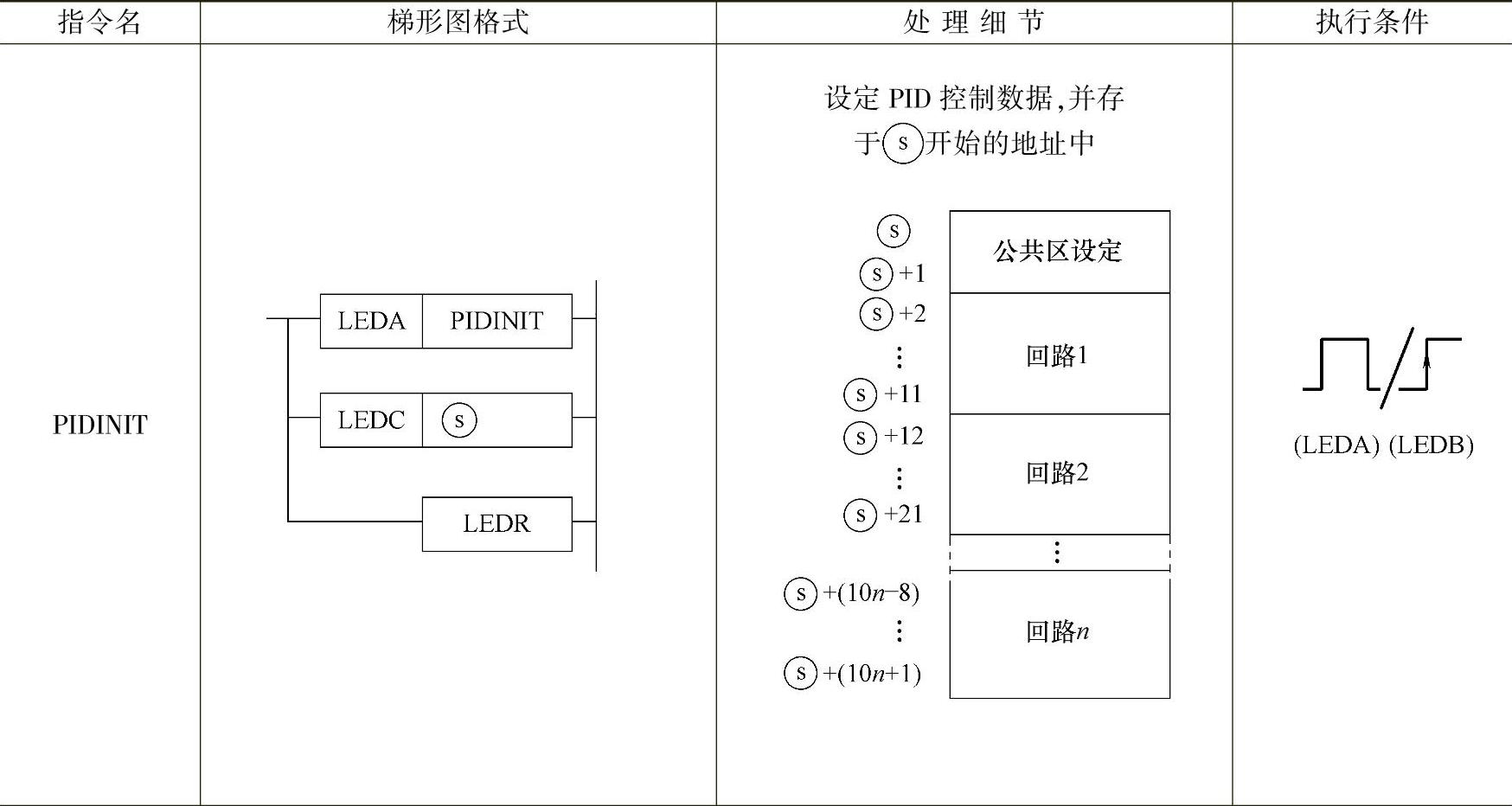
它有多条处理PID指令,而不是一条,见表3-7。
表3-7 QCPU/QnACPU PID指令
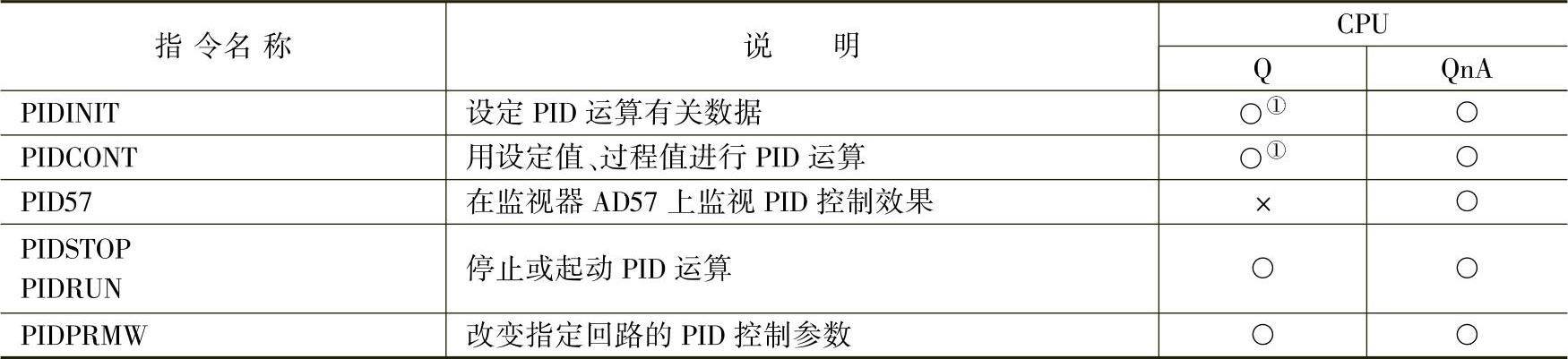
①可设定为用或不用。
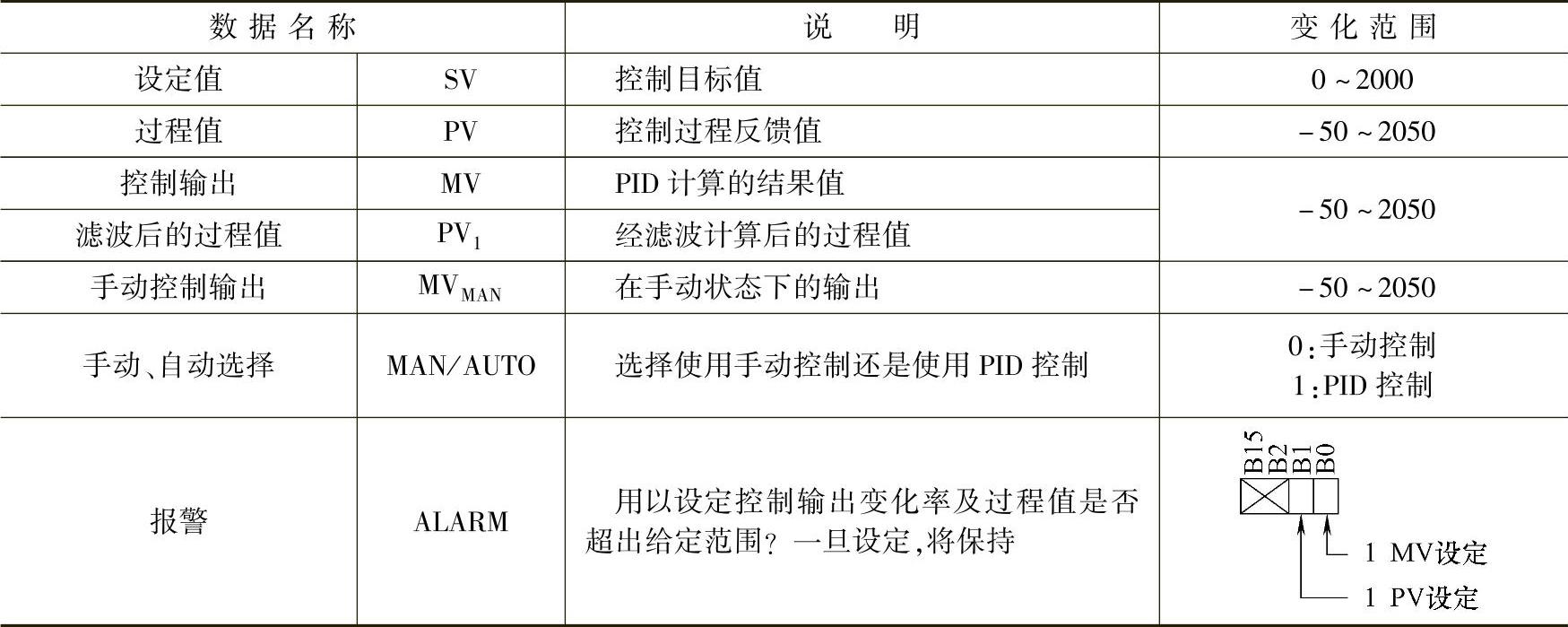
可知,对AnA、QnU及QCPU-A机型有:PITINIT(用于PID参数设定)、PIDCONT(用于PID控制运算)、PID57(用于PID监控显示)指令。而对QCPU-Q有PITINIT(用于PID参数设定)、PIDCONT(用于PID控制运算)、PIDPRMW(用于PID参数改变)、PIDSTOP(用于指定回路PID控制停止)、PIDRUN(用于指定已停止的回路PID控制重新开始)指令。它可进行多个(可多达32)回路的PID控制,但各回路的参数是集中放置在统一设定数据区中。其中PIDINIT、PIDCONT、PIDSTOP、PIDRUN及PIDPRMW指令参数及设定范围见表3-8、表3-9、表3-10、表3-11。
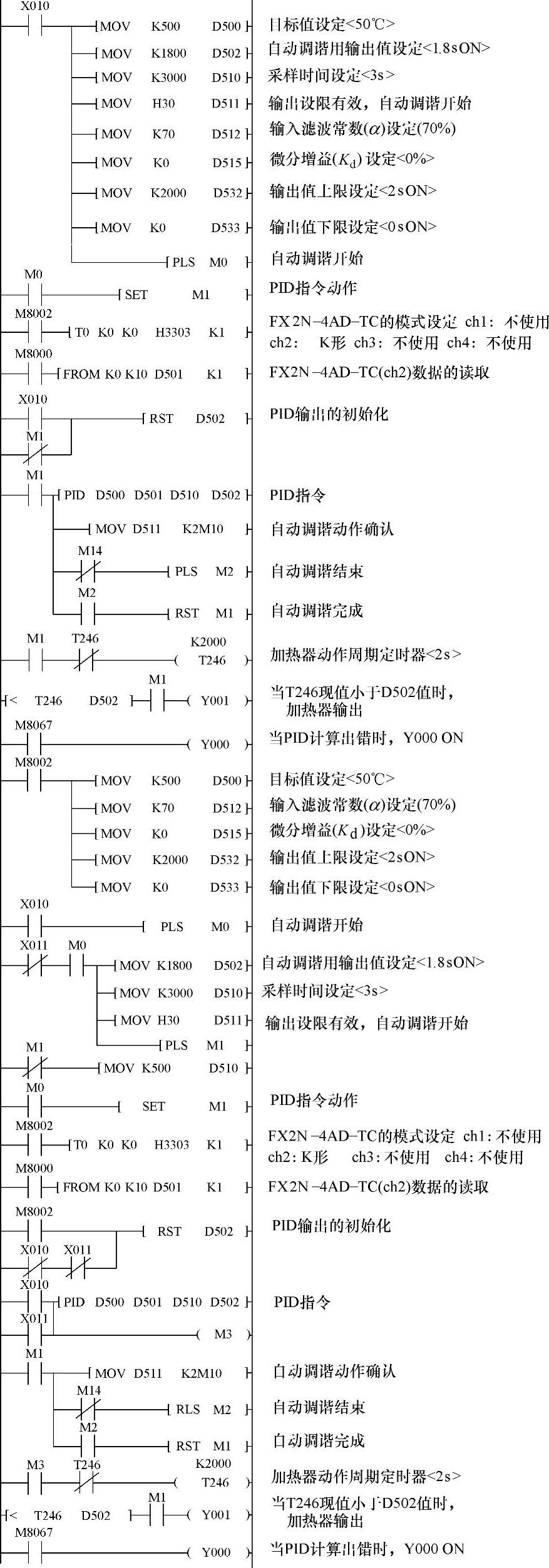
图3-64 自动调谐及PID控制程序
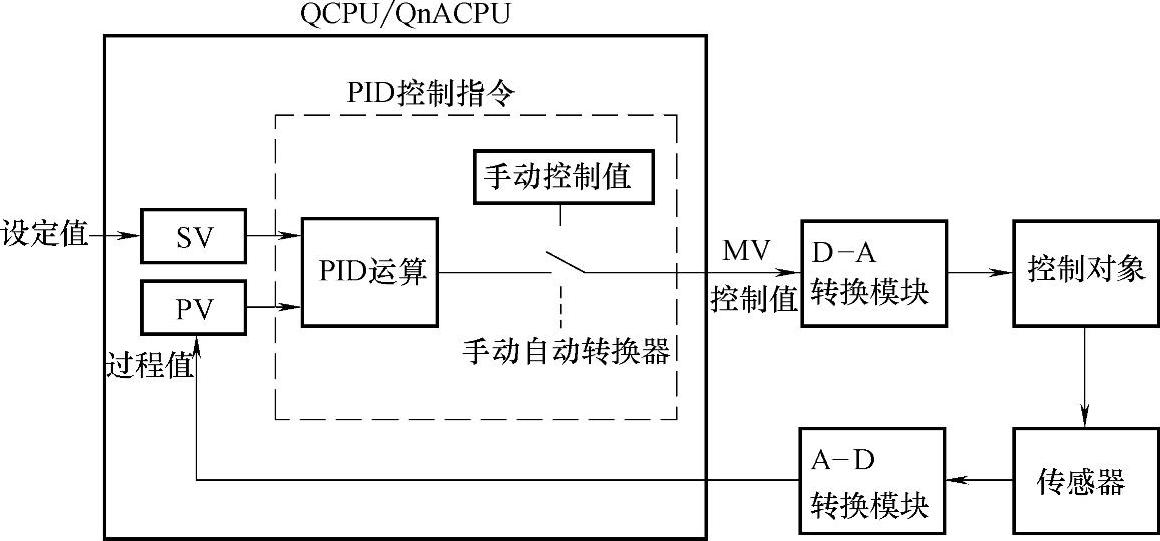
图3-65 PID控制框图
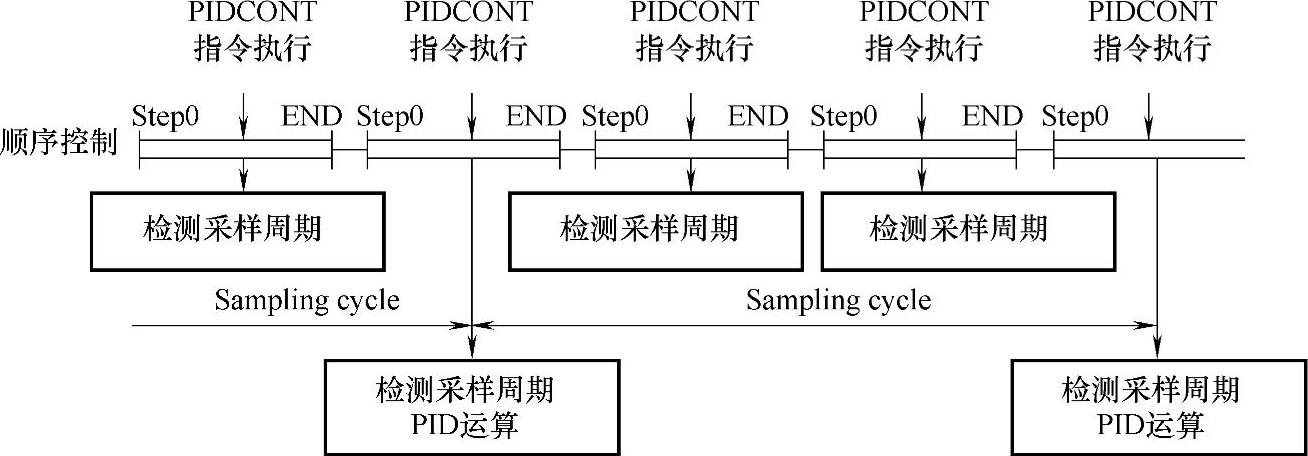
图3-66 PID指令执行过程
表3-8 PIDINIT、PIDCONT等指令参数
(续)(www.daowen.com)
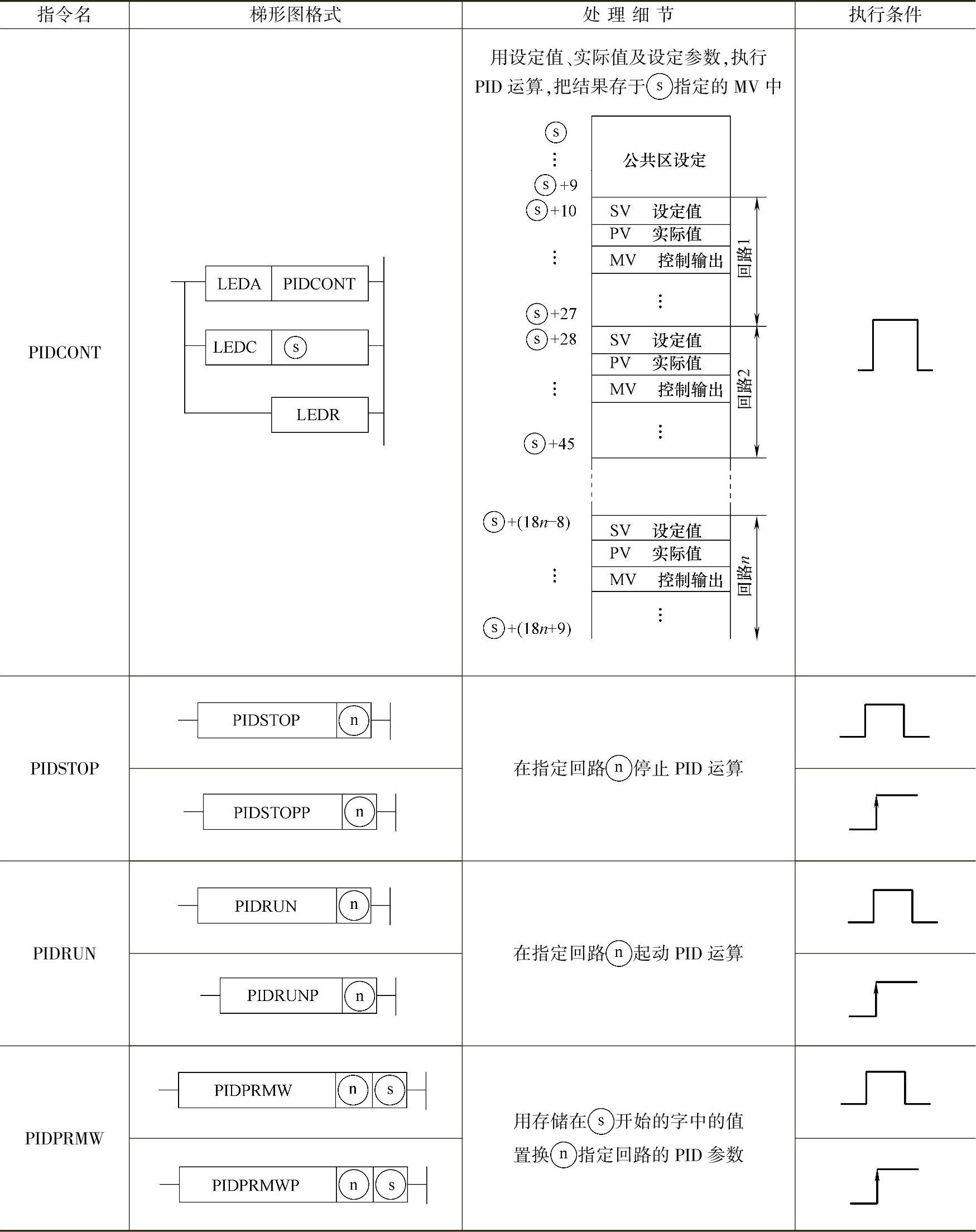
表3-9 PID指令公共区参数

表3-10 PID指令各回路参数
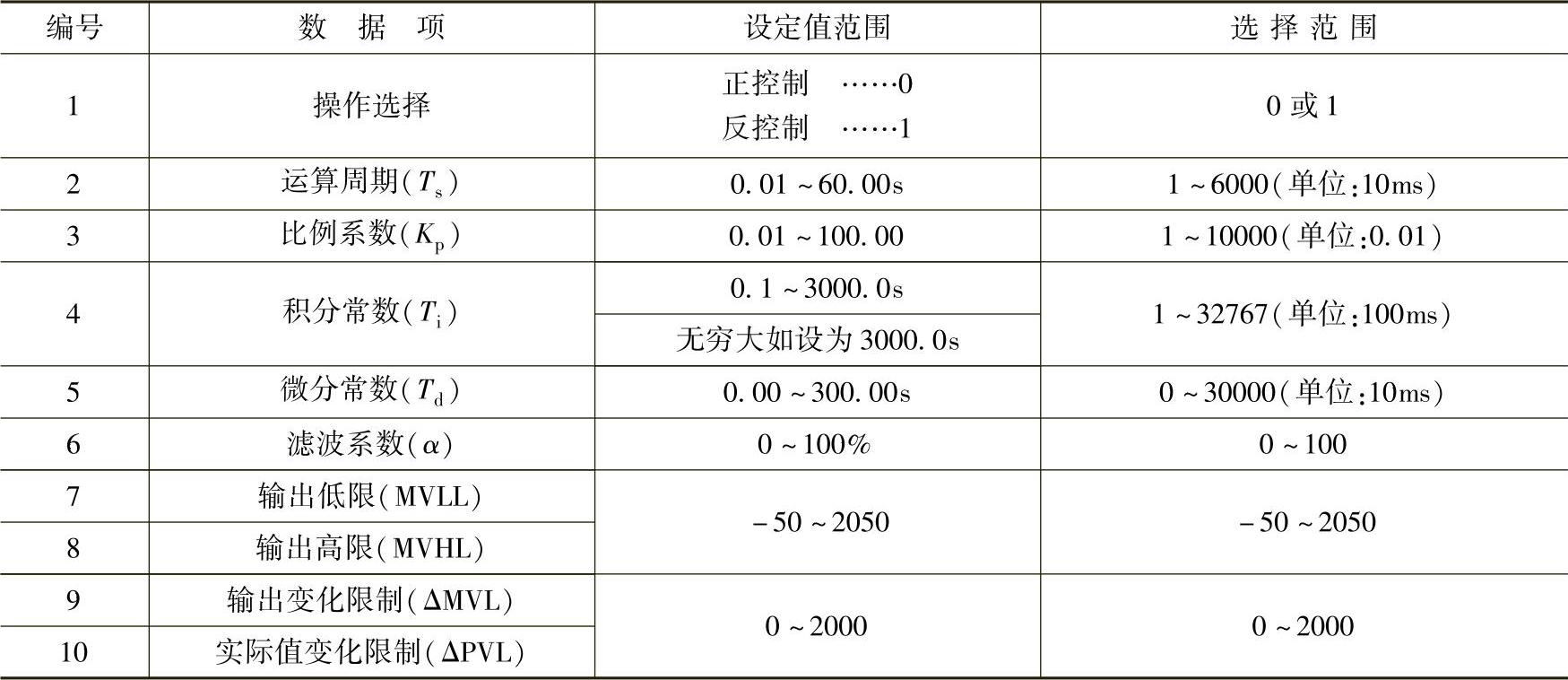
表3-11 PID参数设定范围
以下是三菱PID指令手册上介绍的使用PI指令实例,但把监视程序省略。图3-67为它的系统配置,而图3-68所示的为梯形图程序。
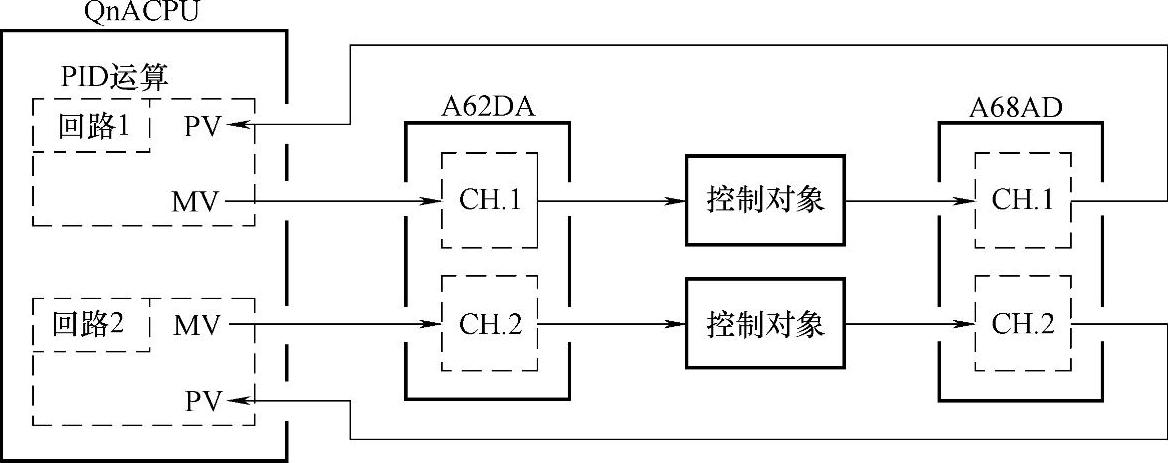
图3-67 PID控制系统实例
从图3-67可知,该系统有两个PID控制回路。模拟量输入模块为A68AD,模拟量输出模块为A62DA。其I/O地址分别为X/Y80~X/Y9F及X/YA0~X/YBF。各占16个位。而图3-68有指令使用注解,可对照地进行阅读。
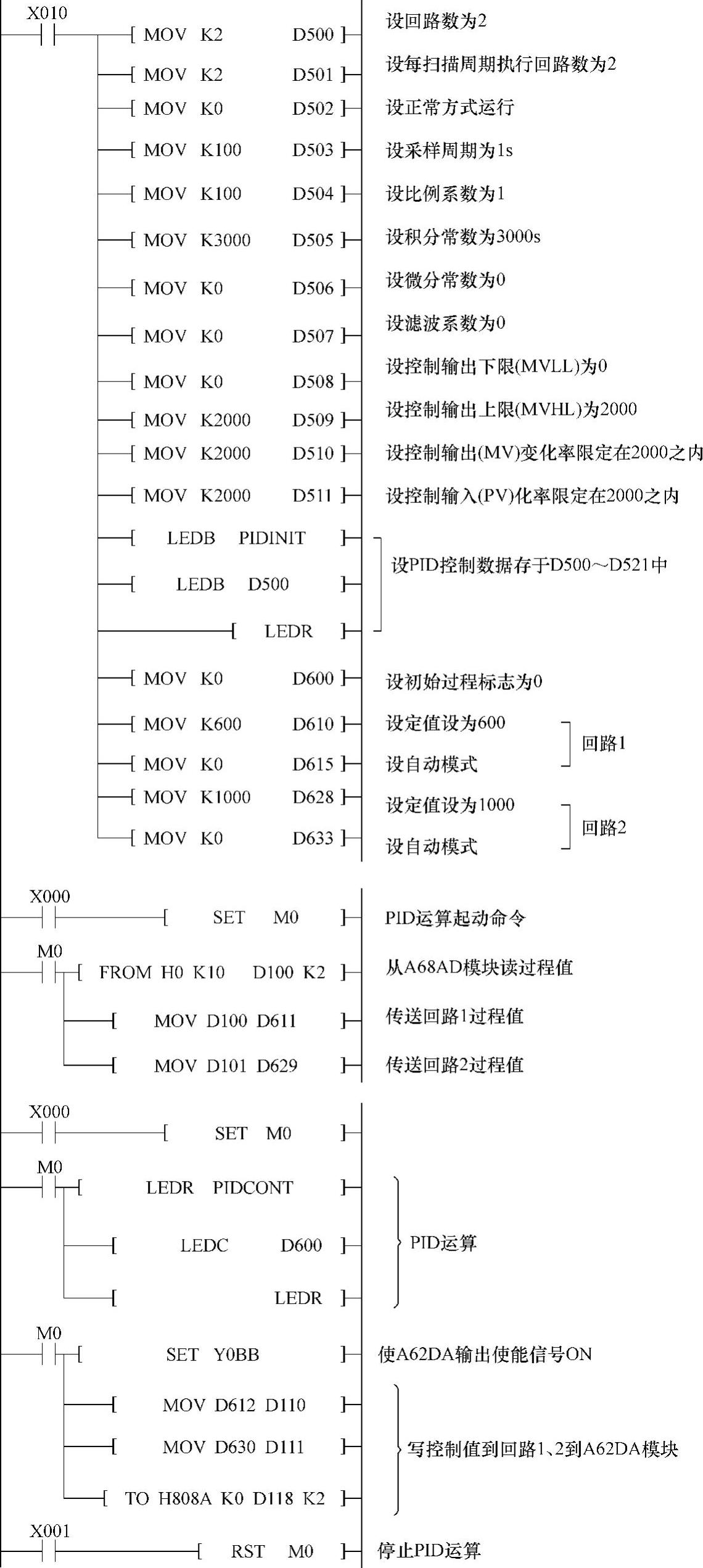
图3-68 PID控制梯形图程序
提示:编写用PID指令进行模拟量控制程序,是比较容易的。但怎样在实际程序调试中修改控制参数,以取得较好的控制效果才是不易的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






