此指令不能放在IL(02)和ILC(03)、JMP(04)和JME(05)指令之间,或放在子程序中,或放在步指令(STEP(08)/SNXT(09))中。否则不能执行。
当指令的执行条件OFF时,本指令不执行,但设定的参数保留,控制值由输出字D的内容确定。这时,直接写D,改变它的值,可实现手动控制。
当指令的执行条件第一次从OFF到ON时,先读参数,初始化工作区,然后执行PID运算,并把结果值送给D。要注意的是,对CS1机之前的机型,一旦指令开始执行,参数改变将不起作用。
当指令的执行条件继续ON时,执行本指令,但只在设定采样时间到的周期才执行。图3-53示出PLC扫描周期与采样周期(设为100ms)以及执行本指令间的关系。
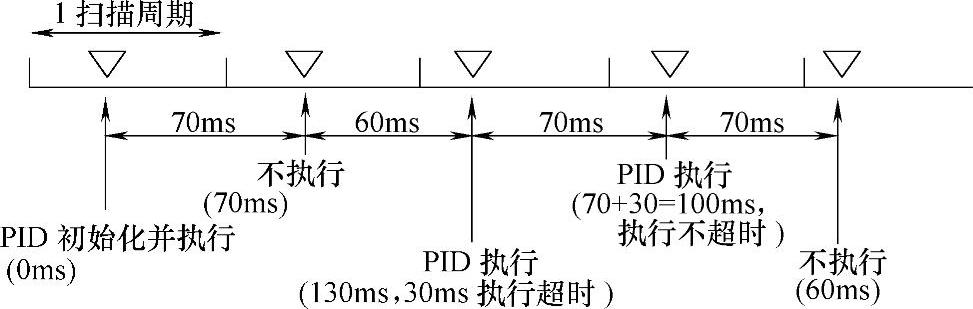
图3-53 扫描周期与采样周期关系
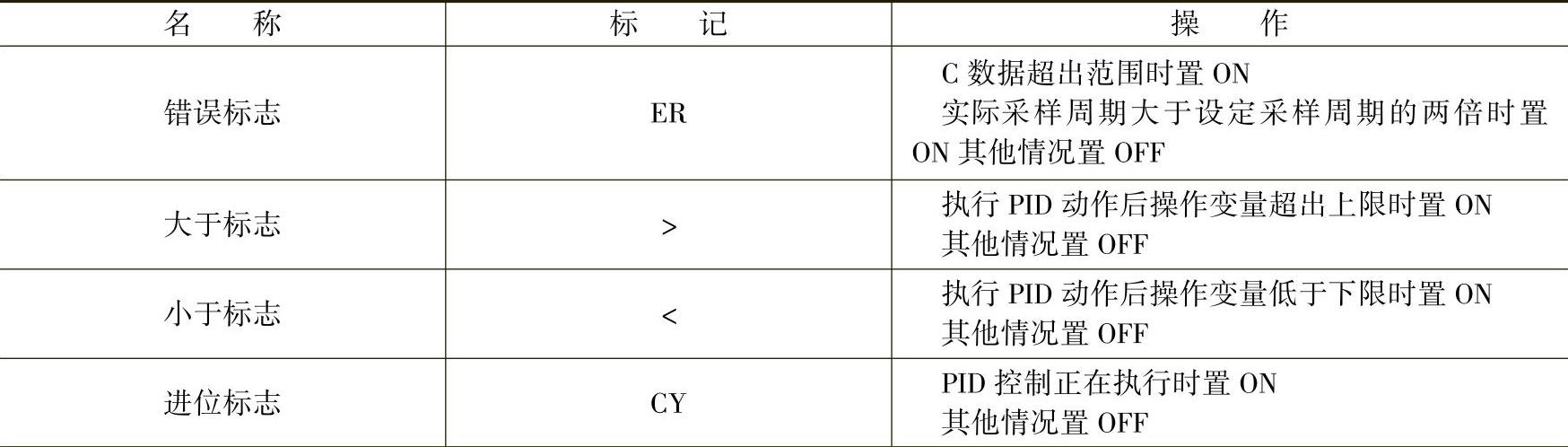
如果C数据超出范围,将产生一个错误,PLC错误标志位ON。如果实际采样周期大于指定采样周期的两倍,将产生一个错误,错误标志置ON,而PID控制继续执行。
PID执行时进位标志置ON。
对CS1机,执行PID动作后,操作变量超过上限,大于标志置ON,此时计算结果以上限值输出。执行PID动作后,操作变量低于下限,小于标志置ON,此时计算结果按下限值输出。
表3-3为执行PID指令时,在不同情况下,各标志位的取值。一般可通过对这些值的判断,得知本指令是否得以正确执行。
表3-3 执行PID指令时标志位状态
(1)PID指令使用实例之一。其梯形图程序如图3-54所示,它用于某电动机转速PID控制。PLC为CPM2A CPU60。
从图3-54可知,当“PID指令控制”触点ON,则执行本控制程序。这里有用得就只有一条PID指令。这PID指令有三个操作数:DM942,存储实际值,十六进制格式;DM900,存储控制参数的首地址,占33个字;DM950,存储PID运算结果,十六进制格式。
这里的关键是设定好控制参数。本例的有关设定值为
DM 0900:#5F,控制的目标值,十六进制格式,不过这里的5F只是转速象征值;
DM 0901:#40,比例带,BCD格式;
DM 0902:#100,积分常数,BCD格式;
DM 0903:#80,微分常数,BCD格式;(https://www.daowen.com)
DM 0904:#10,采样周期,BCD格式,单位100ms,本例采样周期为1s;
DM 0905:#0,反向控制;
DM 0906:#0,输入、输出范围为8位,即0~FF。
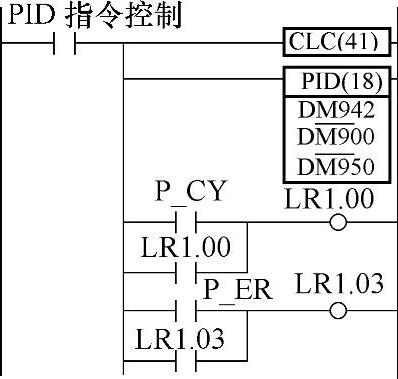
图3-54 PID指令使用实例1
这里还对P_CY及P_ER是否ON作了记录,目的是看参数设定是否正确。如图3-54所示,如出现LR1.00 ON,说明本指令已执行。如LR1.03 ON,说明执行本指令出错,将得不到预期的结果。
可知,用PID指令实现控制,编程非常简单,一条指令加参数正确设定即可。
提示:如果控制参数设置得当,执行条件ON,本指令执行,进位位P_CY ON。可用它观测本指令是否已执行。也可人为地改变指令控制的输出值,即指令操作数D的内容,如不可改变,也说明指令已执行。
提示:对如CPM2A这样的PLC,PID指令为扩展指令,使用前应先对其功能号进行设定。设定后还要下载给PLC。对CPM2A机,在下载前还应把DM6602的高字节设为01,这意味着允许下载扩展指令功能码的设定。
(2)PID指令使用实例之二。其梯形图程序如图3-55所示。
从图3-55可知,在000000的上升沿(从OFF~ON),工作区D00209~D00238按D00200~D00208中的参数(如下所示)进行了初始化。工作区被初始化后,将执行PID运算,并将操作变量输出到0020。当000000为ON时,PID控制依据D00200~D00208中的设置,以采样周期间隔执行,操作变量输出到0020。但是,在000000置为ON后,如果改变比列带(P)、积分常量(TiK)、微分常量,用在PID计算中的PID常量将不会改变。
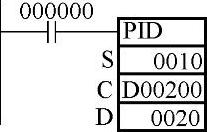
图3-55 PID指令使用实例2

提示:当000000为OFF时,其输出值可用手工设定,如同手工对其操作。
欧姆龙公司新型PLC还新增有PIDAT指令,其参数可进行自整定。是否进行自整定,由自整定命令位控制。
整定命令位控制ON,开始自整定,强制使控制变量发生变化(最大值控制变量←→最小值控制变量),监视控制系统的特性,从选定特性中计算出PID常数。自整定完成,此命令位置为OFF,同时,改用新的常数恢复PID控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






