图3-39表示了无静差控制的算法框图。这种控制可完全消除静差。与图3-37不同的只是,这里的控制值不是由偏差E与“设定值”相加产生,而是在每进行一次此类运算时,自身与偏差E相加。这样,可实现即使无偏差,但也可使R大于设定值为R0,实现补充控制。

图3-39 无静差控制算法框图
图3-40为与图3-39对应的梯形图程序。
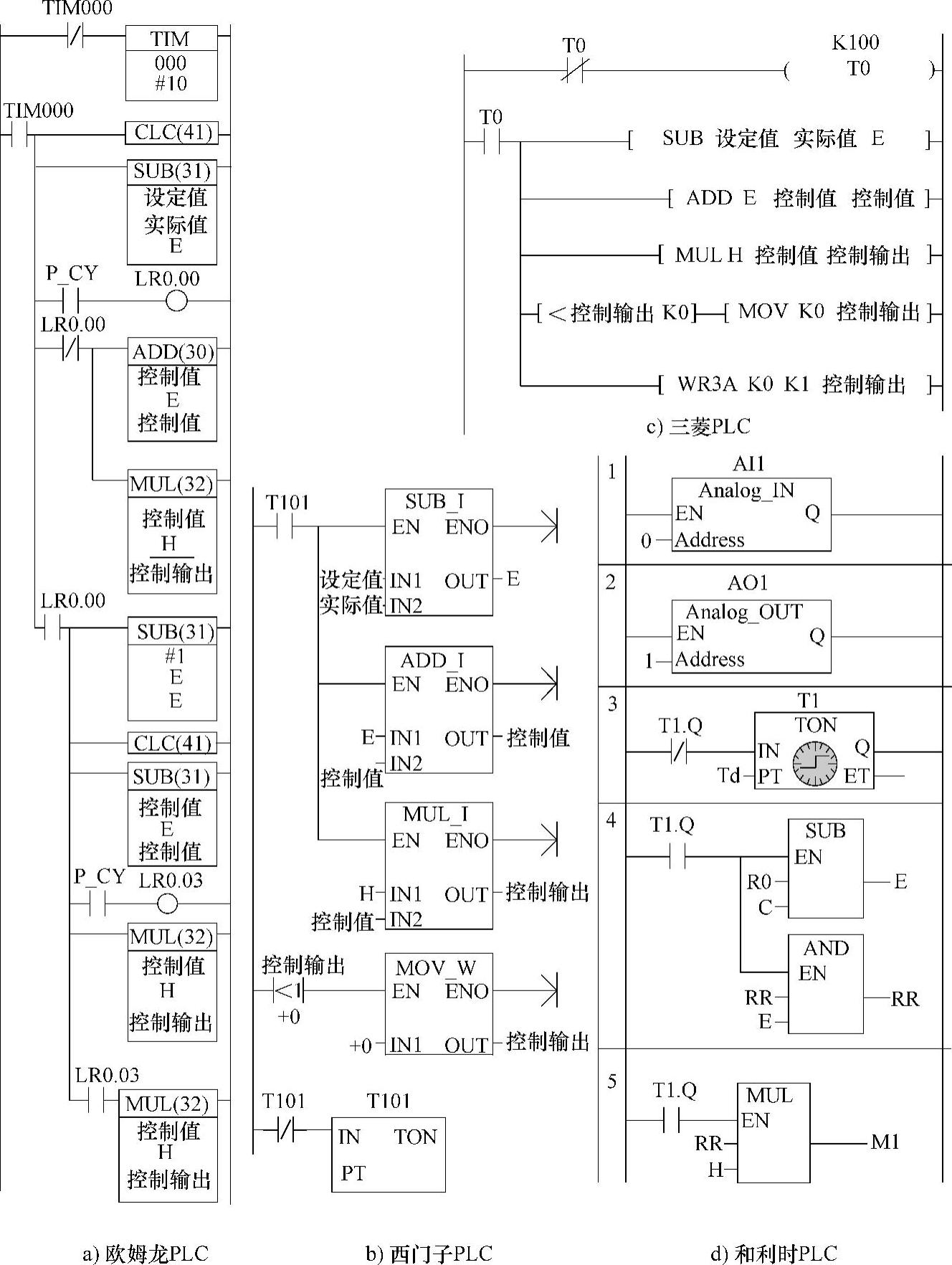
图3-40 无静差控制梯形图程序
从图3-40a可知,当“无静差控制”ON,则执行如图程序。先是定时器TIM 000工作。每1s,其常开触点TIM 000 ON一次,则控制程序执行一次。这么做的目的是,控制输出改变后要等待一定时间再处理,以适应系统时延特性。否则会出现超调,以至于系统振荡。这里定时间隔为1s,如系统时延较大,还可加大。本程序与图3-33程序不同的只是用E与“控制值”累加(或累减),代替E与“设定值”的加(或减)。
图3-40b、c、d与其不同的只是用十六进制数,且也没有进位位参与计算问题。(www.daowen.com)
图3-40d中节1、2为使能模拟量输入、输出模块。节3为调用定时功能块,以产生定时脉冲。并用其去起动误差累加运算。节4、5进行偏差累加,即无偏差控制计算。当然,这里变量须与模拟量输入、输出通道地址关联。如果必要,还要作些数值换算。
由于这里用了累加、累减,相当于加入积分环节。所以,只要存在偏差,即“设定值”减“实际值”不为0,那么,每进行一次运算都将使“控制值”变化。直到“控制值”变化到使系统实际值等于设定值时,即“设定值”减“实际值”为0,不存在偏差时,“控制值”才保持不变。这也就实现了设定值对系统的无静差控制。
无静差控制可消除所有由干扰产生的误差,这是它的优点。但同样存在系统能否稳定工作的问题。而系统要是不稳定,那即使静态精度再高,也是不允许的。所以,还得寻找更好的控制办法。以下将介绍的PID控制就是一个较好的办法。
提示1:离散系统闭环控制振荡有两种原因:静态原因及动态原因。
提示2:静态原因是系统离散性。系统离散,就不可能任意要求的调节量都存在。如设定值正是这个不存在调节量,那是永远做不到的。而硬要这么做,只好振荡了,即出现调节量一会儿比设定值大,一会儿比设定值小,总也稳定不下来。正如,要买1斤鸡蛋,很难做到买的正好是一斤,要不稍多一点,要不就是稍差一点。显然,提高分辨率(如鸡蛋很小)可减少这个振荡。
提示3:动态原因是系统惯性、时延。前者在实际的系统中也总是存在的。减少惯性,减少时延,选择合适放大倍数,可避免出现振荡。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




