在三电平逆变器驱动电机平台上实现了间接转矩控制及其无速度传感器运行。实验条件和参数同7.4.4节,采用引入转矩估计的龙贝格观测器,速度外环采用FLC,系数为Ke=1,Kce=140,Ku=1000,系统采样频率为5kHz,系统框图如图7-54所示。
图7-59和图7-60所示是针对起动性能进行的研究,前者是仅磁链指令采用斜坡函数的起动波形,后者进一步加入了直流预励磁,相应的最大起动电流从25A降到了不到9A,证明采用预励磁加斜坡可以有效地减少起动电流,与仿真结果相符;另外,从图中看出转速和磁链也具有良好的动静态性能。
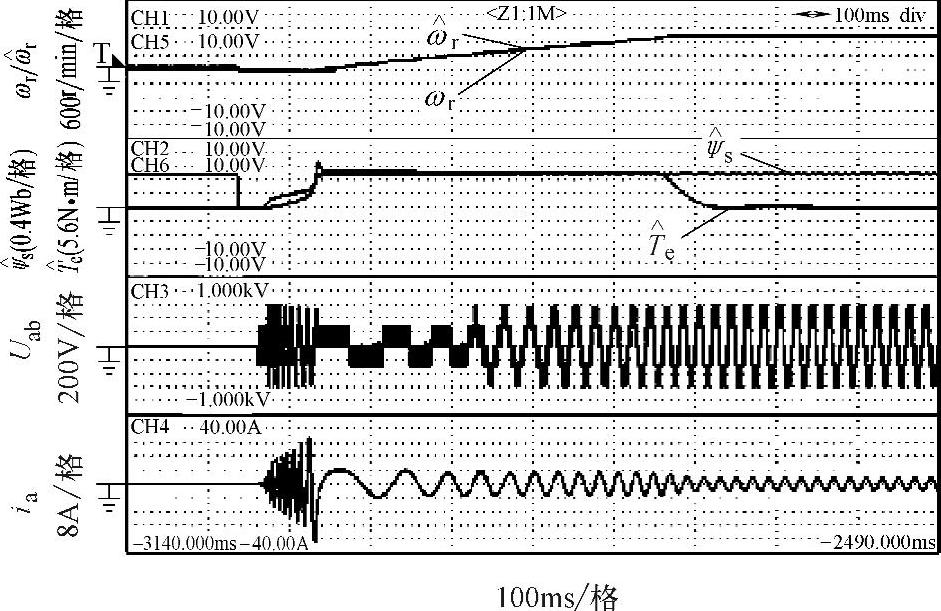
图7-59 起动(斜坡函数)
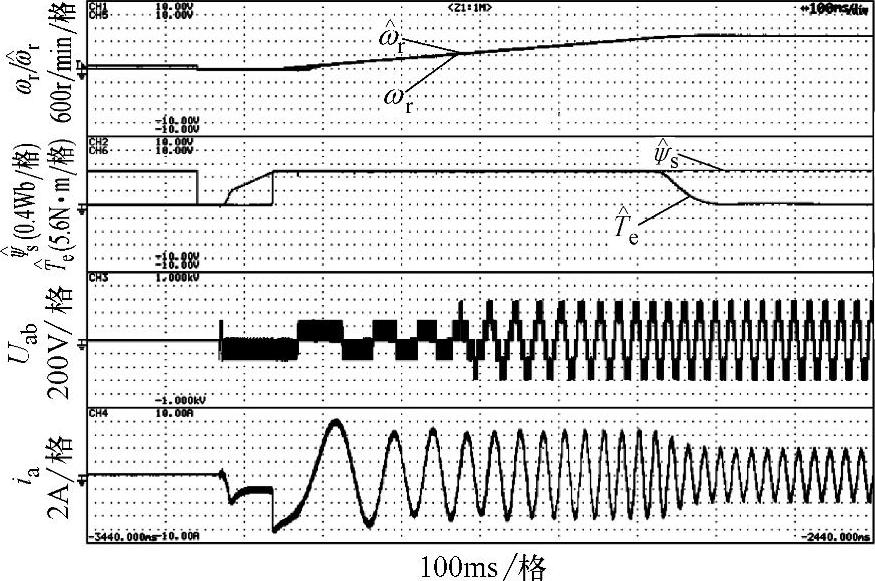
图7-60 起动(预励磁+斜坡)
图7-61考察了ITC在突加突减100%额定负载时的性能。由于转速环采用FLC,可以看出转速的跌落很小而且很快恢复到原来的稳定值,对负载干扰具有较强的鲁棒性,而且磁链在动态过程中基本恒定。
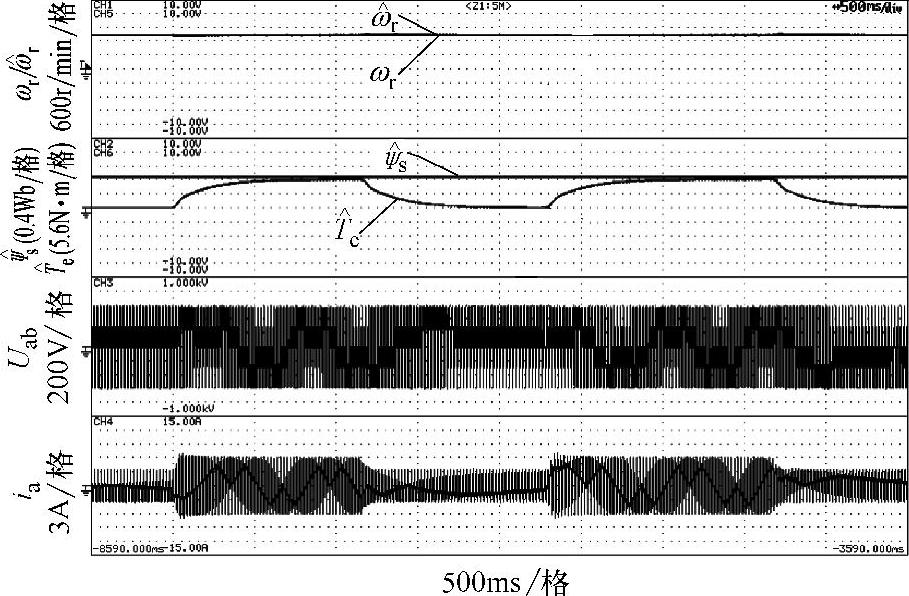
图7-61 1500r/min突加减100%额定负载
图7-62和图7-63分别考察了系统在高速1500r/min和低速150r/min正反转的性能。可以看出,无论高速还是低速,估计转速都可以很好地跟踪实际转速,动态过程中定子磁链保持恒定,系统都具有良好的动态性能。(https://www.daowen.com)
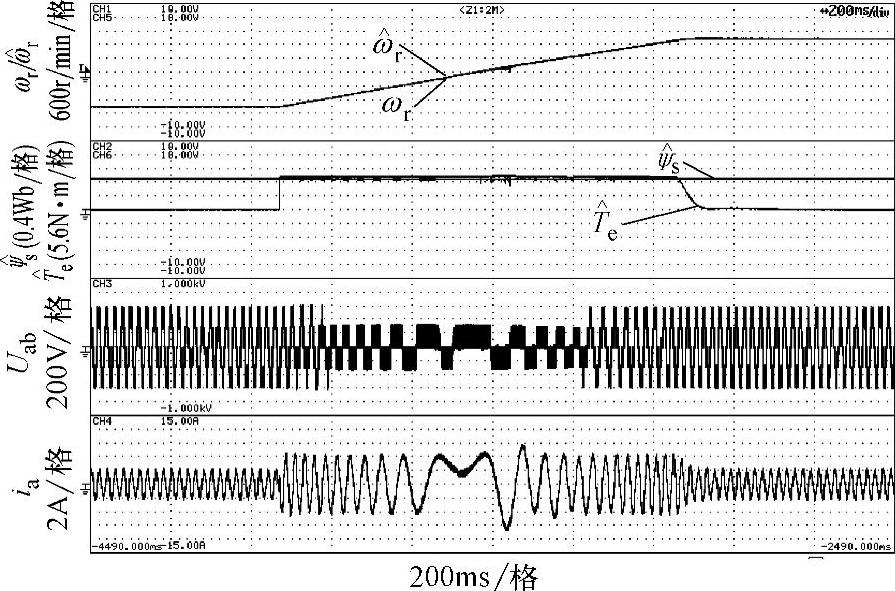
图7-62 1500r/min正反转
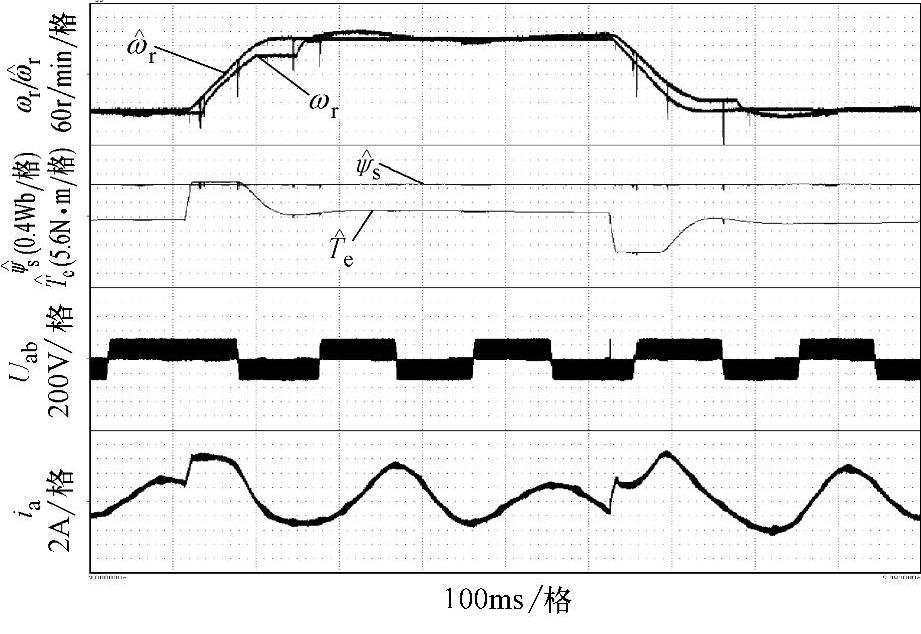
图7-63 150r/min正反转
图7-64和图7-65考察了系统的低速性能,分别是电机在15r/min空载稳态运行和30r/min带额定负载稳态运行的实验结果。需要说明的是,低速时图中实际转速出现了较大波动,这是测速码盘精度所致,并非实际转速如此,从电流波形上也可以看出正弦度良好。由于采用的是观测转速闭环,可以看出估计转速比较平稳,证明基于FLC的ITC在低速时也有良好的性能。
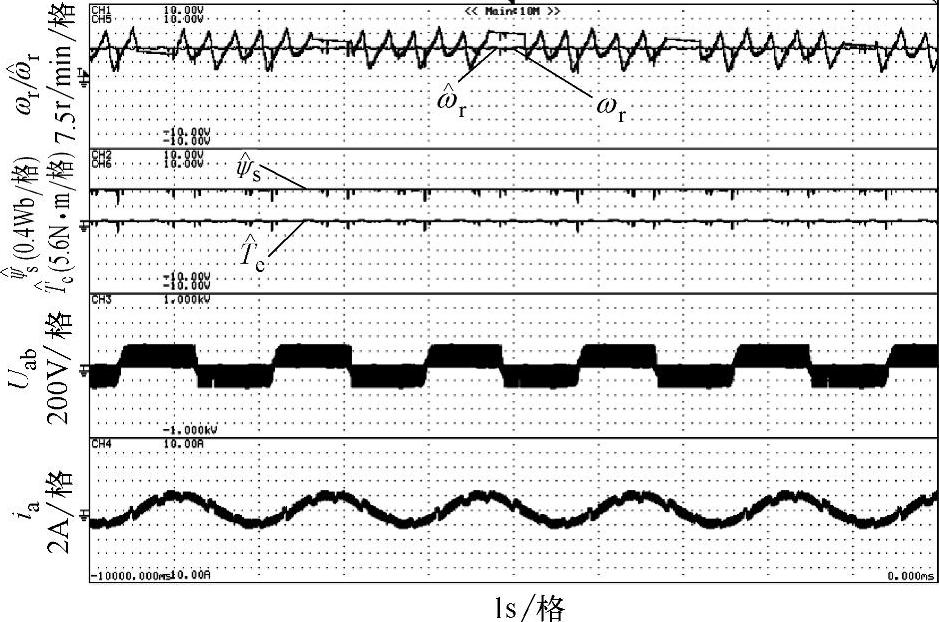
图7-64 15r/min空载稳态波形
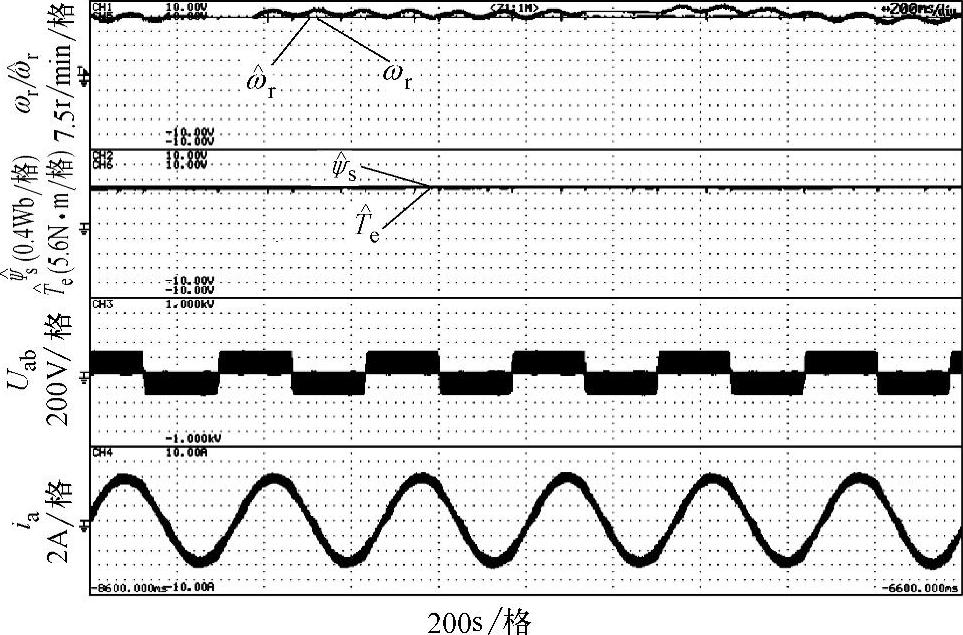
图7-65 30r/min满载稳态波形
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






