【摘要】:在MATLAB/Simulink中进行了仿真,电机参数同7.4.3节。由于在控制器中采用了SMC和FLC,转速和转矩具有良好的动态响应,而磁通在0.05s即达到额定值,相应的起动电流也比较大,原因为磁通指令一开始即为额定值,相应的磁链环输出处于饱和状态。图7-41 新型定子磁场定向控制框图图7-42 SVM-DTC仿真结果(预励磁)如果将磁通指令通过一个斜坡函数后再施加到控制器上,就有可能减少起动电流。仿真结果表明,仅仅依靠斜坡函数依然会导致较大的起动电流,如图7-43所示。
在MATLAB/Simulink中进行了仿真,电机参数同7.4.3节。转速环采用FLC,磁通和转矩环采用SMC,定子磁通和转速观测采用带转矩观测的龙贝格观测器,系统框图如图7-41所示。仿真条件为电机直接从静止空载起动到1500r/min,在0.3s时突加60%额定负载。起动电流过大是DTC经常遇到的一个问题,前面采用直流预励磁的方法来达到减少起动电流的效果,仿真表明如果仅采用直流预励磁的方法直接起动电机会有较大的起动电流,如图7-42所示。由于在控制器中采用了SMC和FLC,转速和转矩具有良好的动态响应,而磁通在0.05s即达到额定值,相应的起动电流也比较大,原因为磁通指令一开始即为额定值,相应的磁链环输出处于饱和状态。另外,系统中缺乏对电流的直接限幅控制,从而导致过大的起动电流。
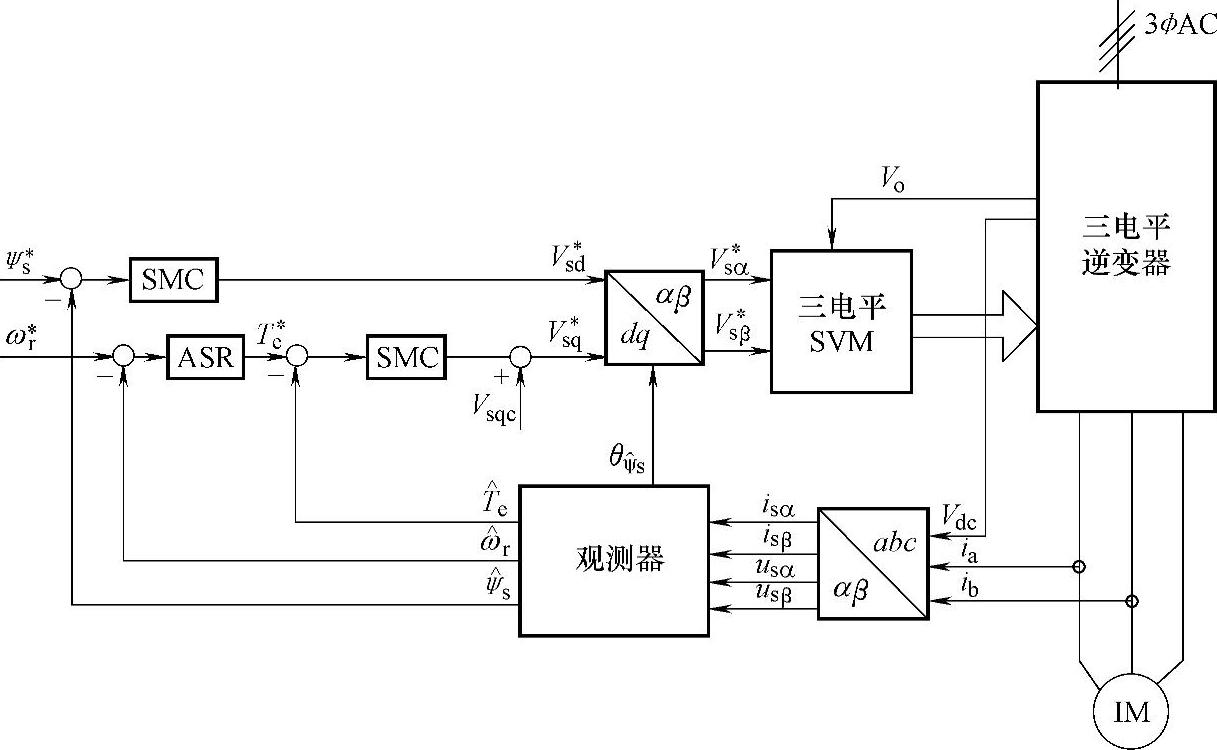
图7-41 新型定子磁场定向控制框图
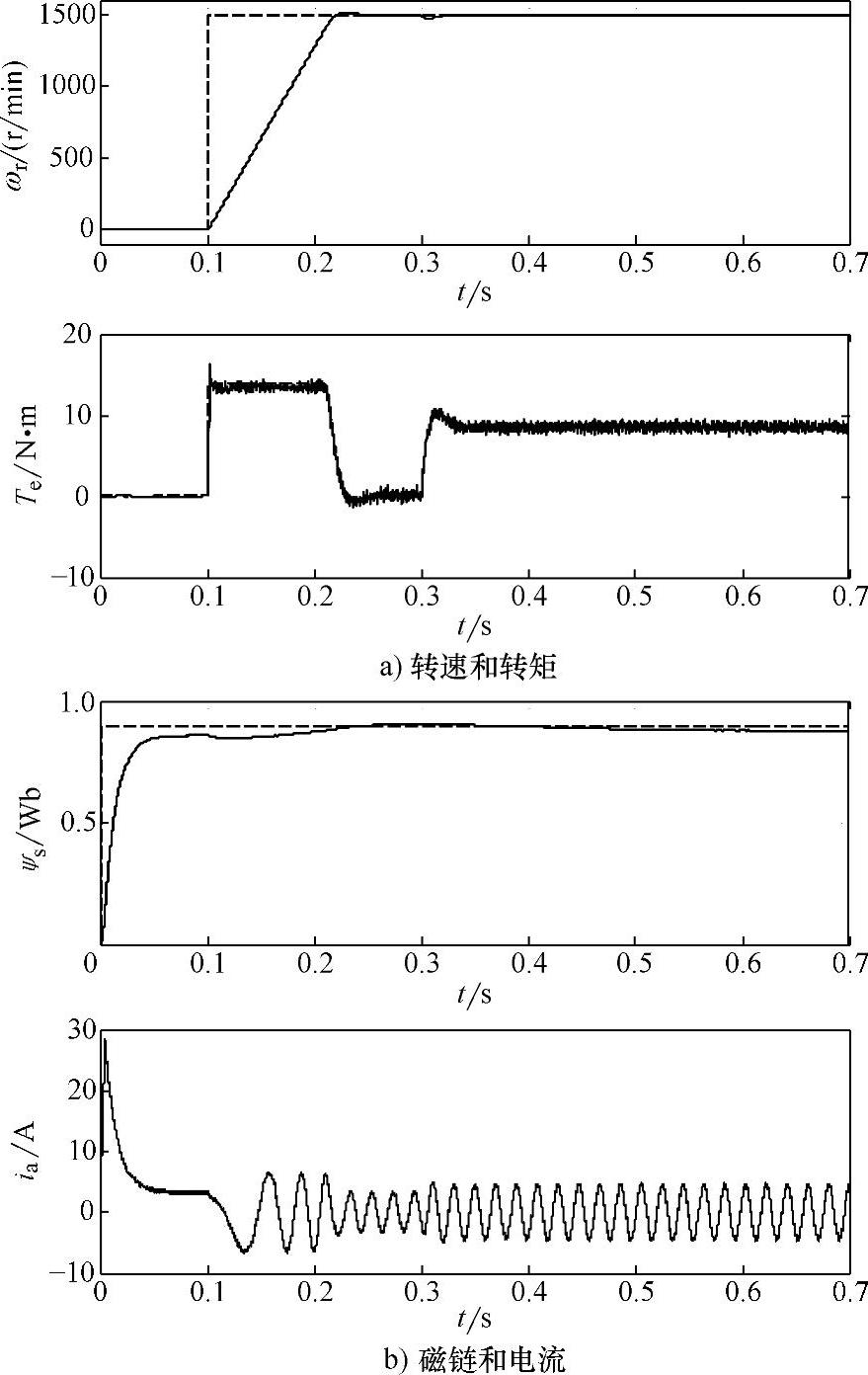
图7-42 SVM-DTC仿真结果(预励磁)(https://www.daowen.com)
如果将磁通指令通过一个斜坡函数后再施加到控制器上,就有可能减少起动电流。仿真结果表明,仅仅依靠斜坡函数依然会导致较大的起动电流,如图7-43所示。采用斜坡函数和预励磁相结合的方法,可以有效地减少起动电流,而且励磁时间可以由斜坡函数来控制,等磁通建立后起动电机,可以保证足够的起动转矩,如图7-44所示。
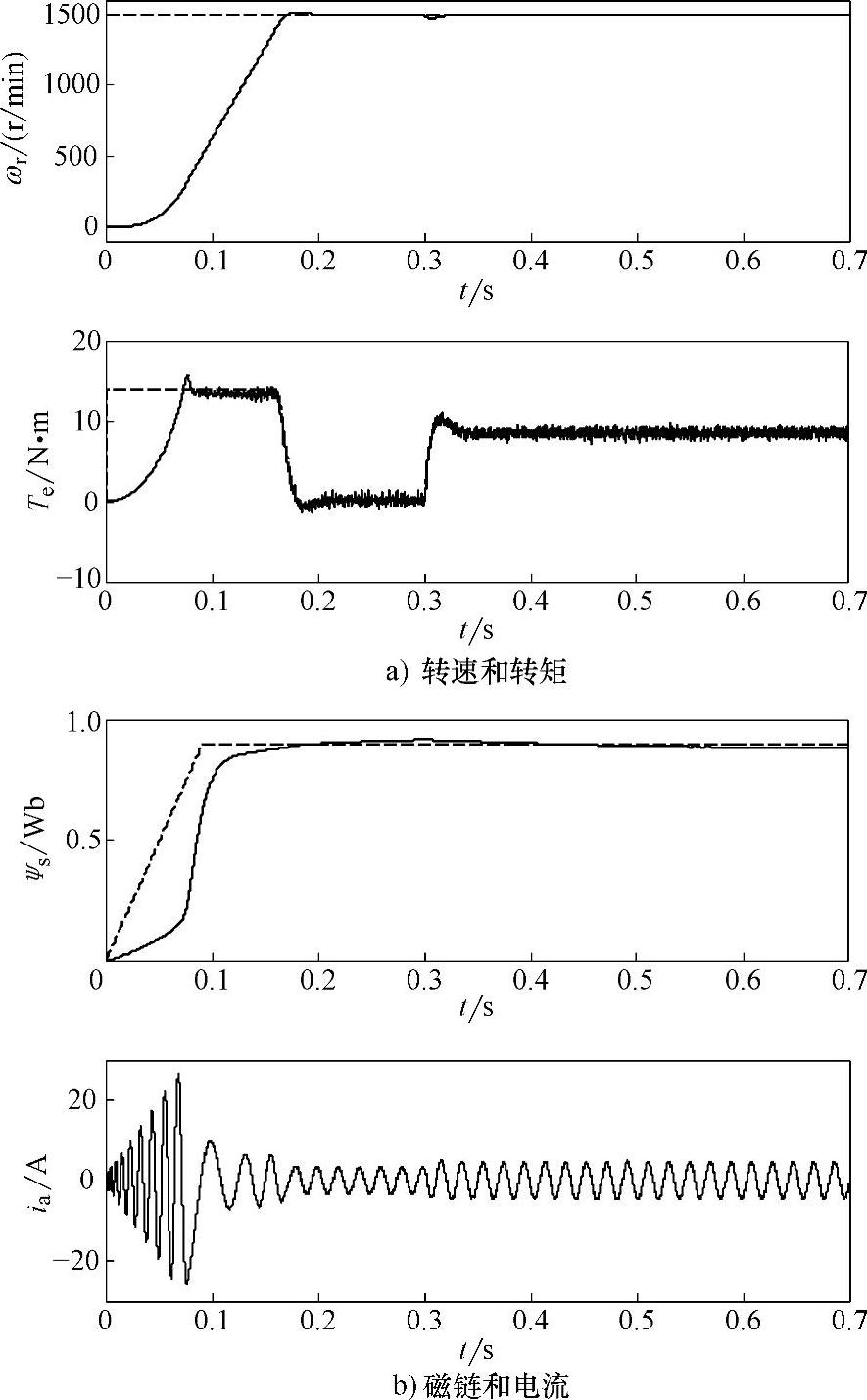
图7-43 SVM-DTC仿真结果(磁通指令采用斜坡函数)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





