【摘要】:图7-40 典型定子磁场定向控制框图为了简化系统,可以把SMC引入到磁链和转矩控制中。由于SMC对干扰具有很强的鲁棒性,式(7-7)中q轴电流可以作为干扰来处理,再结合式(7-5),可以由d轴磁链通过SMC直接得到d轴参考电压,从而简化系统。相应的,把转矩环中的控制器也用SMC来实现。图7-41即为这里提出的新型SVM-DTC。新型SVM-DTC的有效性通过仿真和实验得到了证实。
由式(7-1)~式(7-3)所示的异步电机的数学模型,令ωk=ωψs为定子磁场的同步转速,且令d轴和定子磁场方向重合,即ψsq=0,整理后可得异步电机的数学模型为
由式(7-5)可知,在忽略定子电阻压降下可以通过d轴电压来控制定子磁链,在控制定子磁链恒定的情况下,式(7-9)表明电磁转矩和q轴电流成正比,进一步由式(7-6)可知,忽略交叉耦合项后可以通过q轴电压来控制电磁转矩。
图7-40所示是典型的定子磁场定向的控制框图[46],观察可以发现它需要四个调节器,而且需要一个额外的解耦器来得到d轴参考电流,原因是式(7-7)所示的定子磁链除了与d轴电流有关外,还与q轴电流有关。解耦需要的电流idq如式(7-10)所示,在实际应用中为了提高稳定性和动态性能,通常采用给定值来代替实际d轴和q轴电流参与运算。
 (https://www.daowen.com)
(https://www.daowen.com)
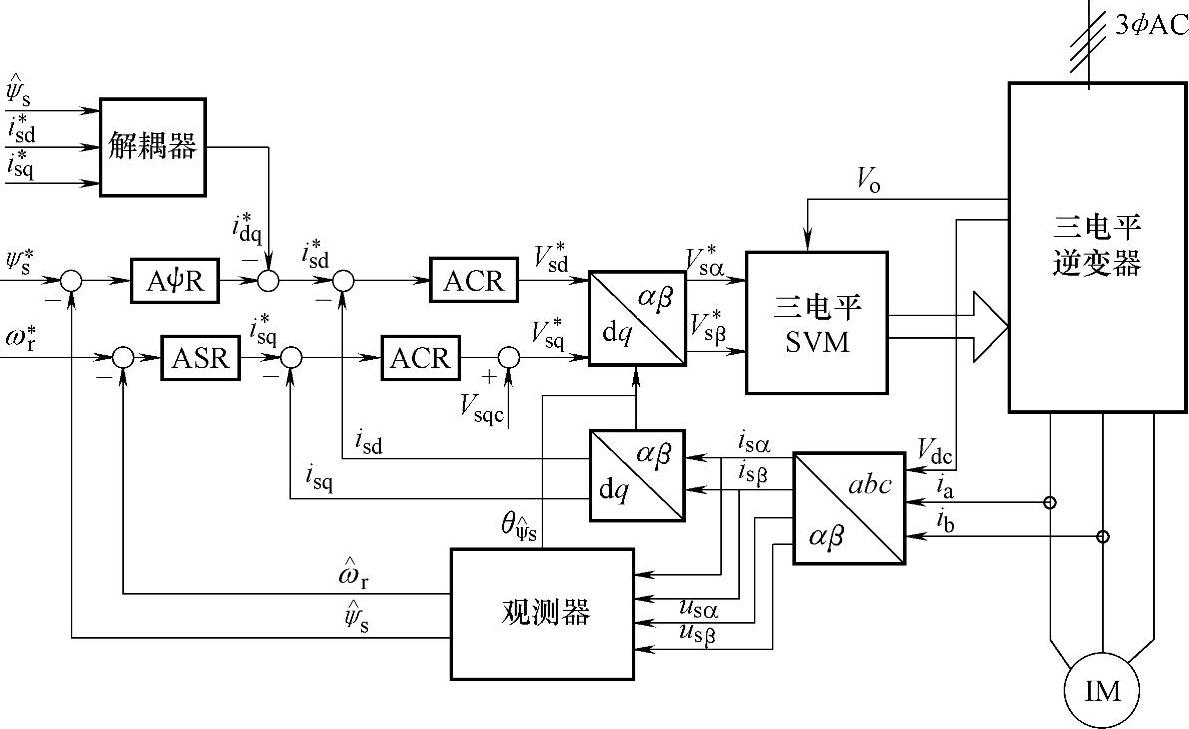
图7-40 典型定子磁场定向控制框图
为了简化系统,可以把SMC引入到磁链和转矩控制中。由于SMC对干扰具有很强的鲁棒性,式(7-7)中q轴电流可以作为干扰来处理,再结合式(7-5),可以由d轴磁链通过SMC直接得到d轴参考电压,从而简化系统。相应的,把转矩环中的控制器也用SMC来实现。图7-41即为这里提出的新型SVM-DTC。相比图7-40,它只需要三个控制器,磁链环采用SMC,简化为一个环,而且不需要解耦补偿,转速环这里采用FLC,以提高抗负载干扰能力和稳态精度,转矩环采用SMC,而且加入了耦合补偿项以提高动态响应。新型SVM-DTC的有效性通过仿真和实验得到了证实。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





