在实际三电平逆变器驱动电机平台上实现了基于离散空间矢量调制的三电平DTC无速度传感器运行。实验条件和参数同7.4.4节,仅优化矢量表换成表7-3所示的合成矢量,另外系统采样频率为10kHz。
图7-33和图7-34所示分别是有预励磁和无预励磁时电机从静止起动到1500r/min的波形。从中可以看出,引入预励磁后有效地减少了起动电流(从16A降到了10A)。
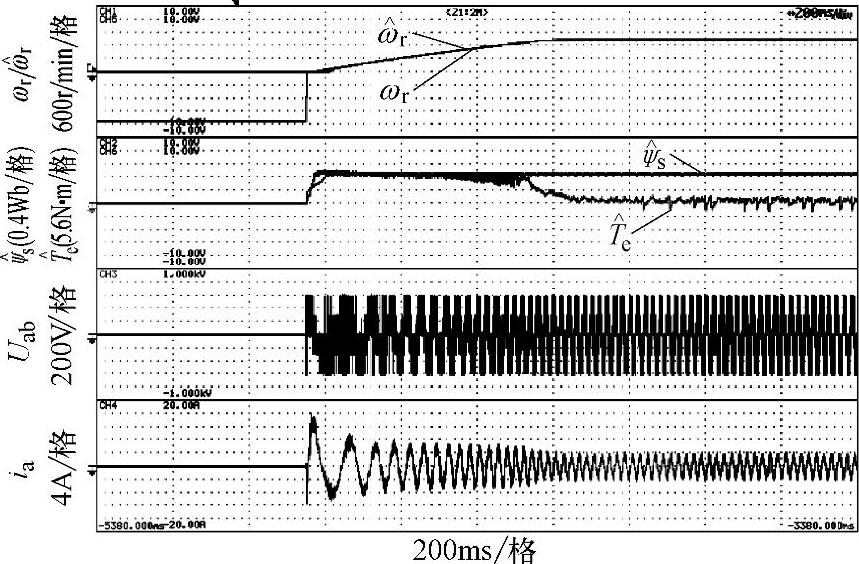
图7-33 直接起动
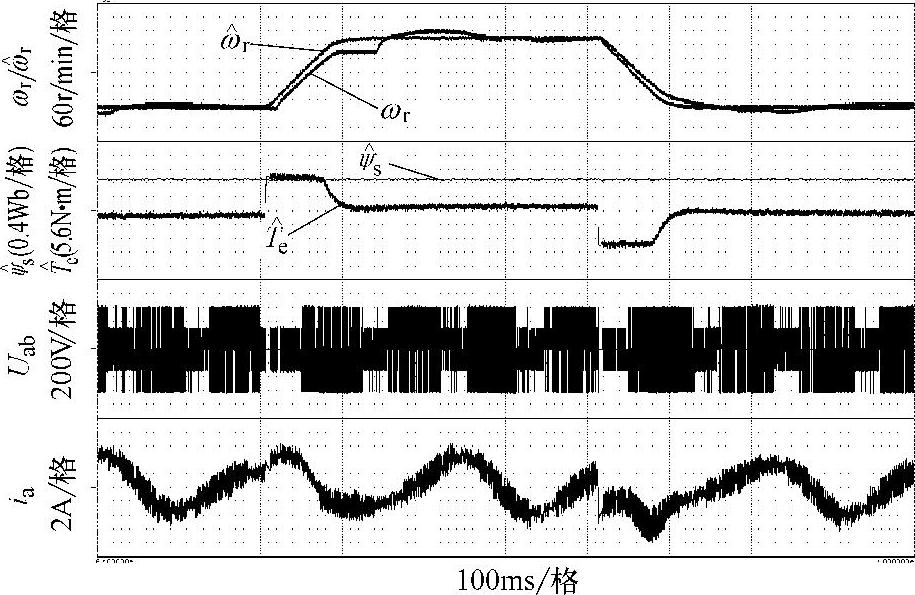
图7-35考察了DTC在突加突减负载的性能。可以看出,转矩响应迅速,磁链基本恒定,但转速上出现了一定跌落,分析原因认为是合成矢量的幅值不够,不像基于优化矢量表的DTC可以使用任何矢量,具有较高的直流母线电压利用率,而合成矢量采用的是固定幅值和相位的矢量,幅值过大对低速性能有影响,而过小又会使直流母线电压利用率降低,而转速较高时需要较高的电压。该问题可以通过提高直流母线电压来解决,更有效的方法是采用幅值可变方向不变的合成矢量,根据转速和负载大小进行实时调节,但增加了实现的复杂性。另外,采用表7-3还有效地解决了7.4.4节中电机正反转的问题。图7-36所示是电机在150r/min正反转的波形。图7-37所示是电机空载稳定运行在1500r/min时的线电压波形的局部放大。可以看出,电压每次跳变只有一个台阶,证明了表7-3的正确性。
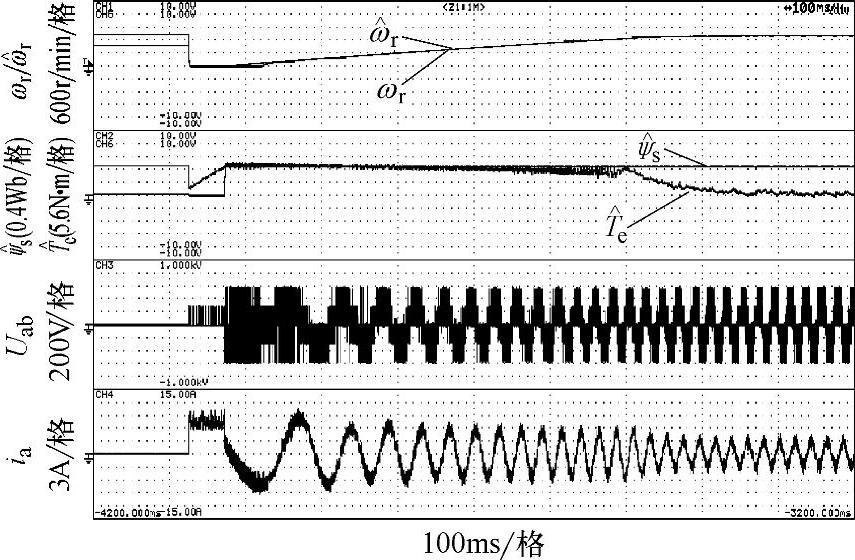
图7-34 预励磁起动
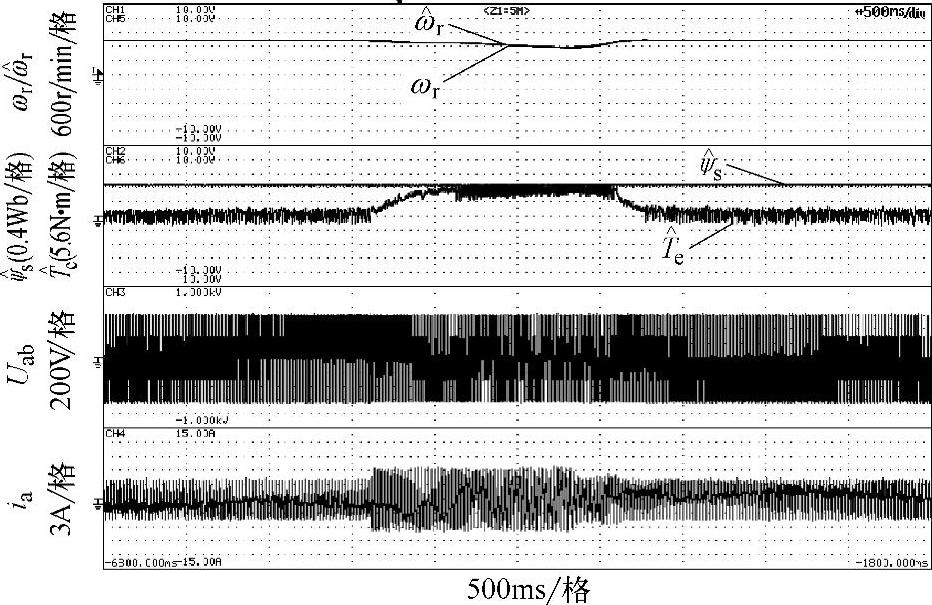
图7-35 1500r/min突加减100%额定负载
 (www.daowen.com)
(www.daowen.com)
图7-36 150r/min正反转
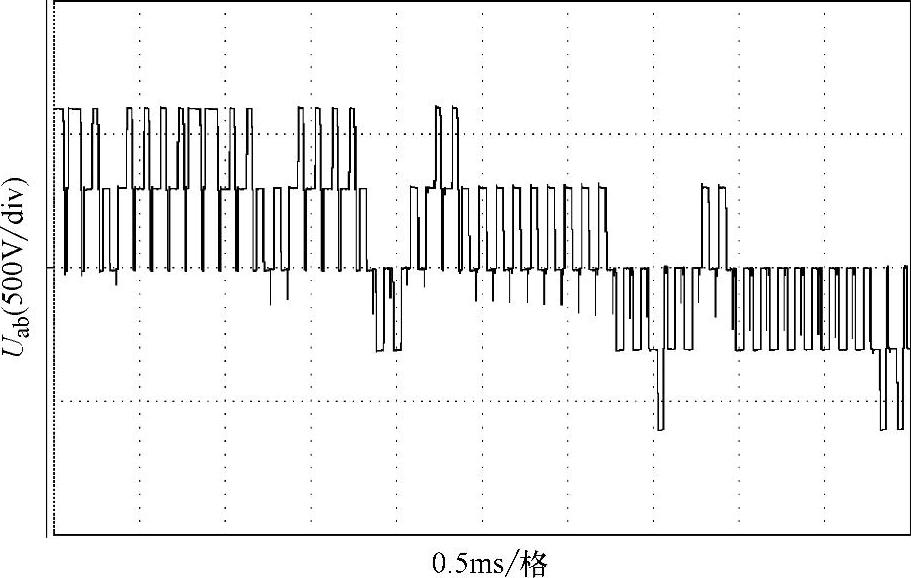
图7-37 1500r/min时线电压稳态波形(放大)
最后还考察了DTC的低速性能。图7-38和图7-39所示分别是电机在6r/min空载稳态运行和30r/min带额定负载稳态运行的实验结果,证明基于离散空间矢量调制的三电平DTC在低速时也有良好的性能。
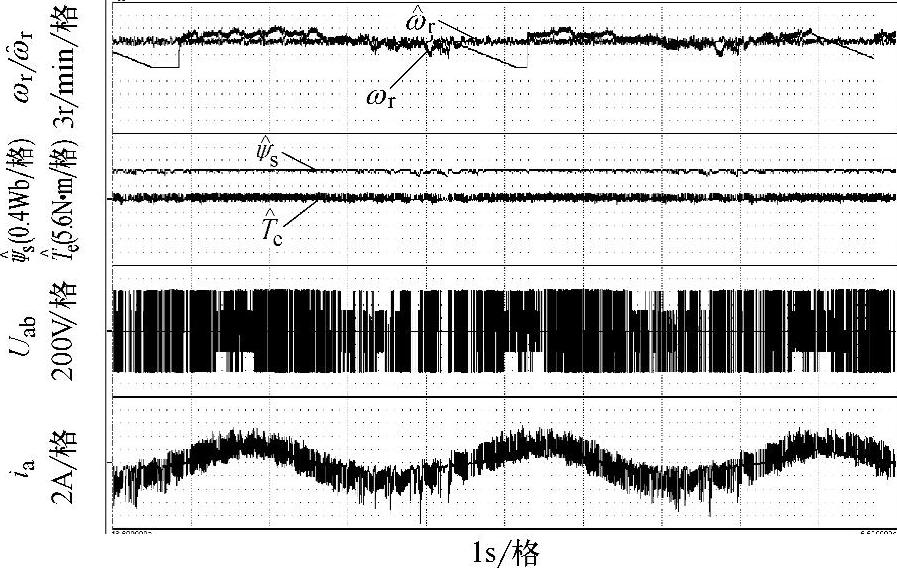
图7-38 6r/min空载稳态波形
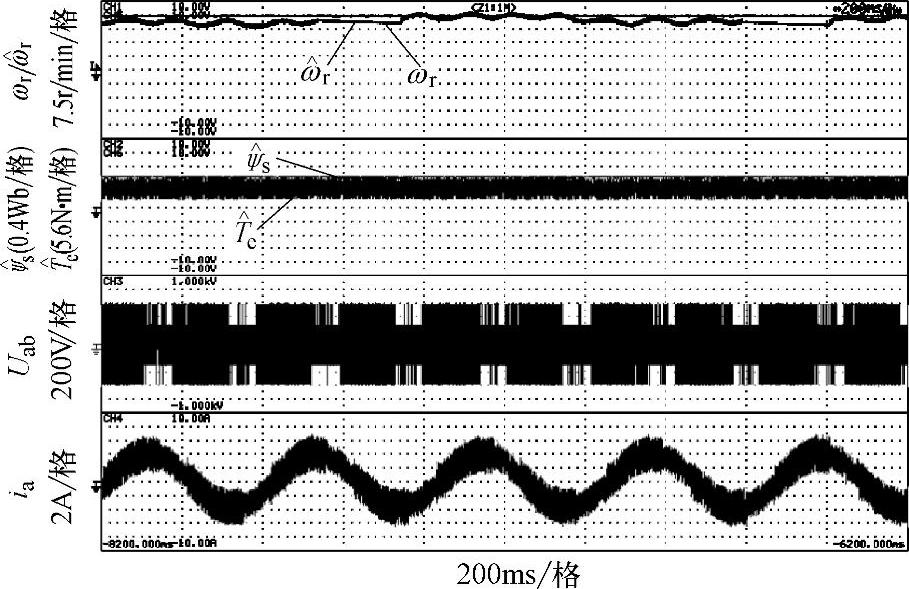
图7-39 30r/min满载稳态波形
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







