本章还在实际三电平逆变器驱动电机平台上对前面的算法进行了验证,实现了基于优化矢量表的三电平DTC无速度传感器运行。直流母线电压为560V,电机参数同7.4.3节,采用引入转矩估计的龙贝格观测器,速度外环采用FLC,系数为Ke=1,Kce=400,Ku=4000,转矩滞环和磁链滞环的宽度分别为0.2pu和0.03pu。系统采样频率为30kHz。
图7-24所示是电机从静止起动到1500r/min的波形。可以看出,未引入预励磁时起动电流比较大(峰值15A),而引入预励磁后有效地减少了起动电流(峰值9A),与仿真结果基本一致,并且起动转矩很大,由于闭环控制的作用,预励磁过程中的电流大小可以有效控制,如图7-25所示。
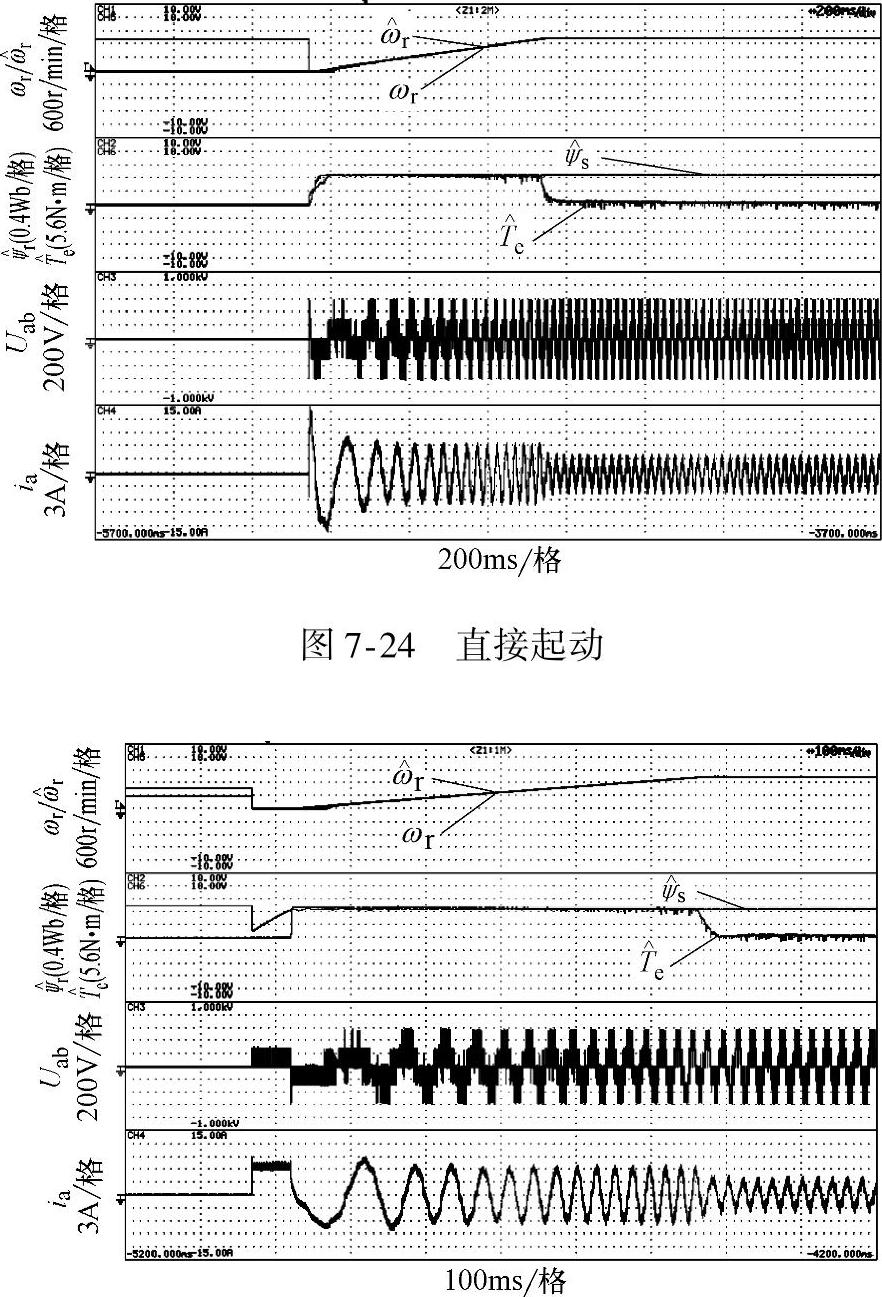
图7-25 预励磁起动
另外,还考察了DTC在突加突减负载的响应。从图7-26可以看出,在100%负载干扰情况下,转速仅有略微波动然后很快恢复原来稳态值,具有很强的抗干扰能力。需要指出的是,引入过渡矢量虽然保证了矢量切换的安全,但同时对系统的动态和稳态响应造成了影响,表现在电机从正转到反转时不能稳定运行,有大量纹波存在,其原因是过渡矢量的引入。图7-27所示为电机150r/min正反转波形。
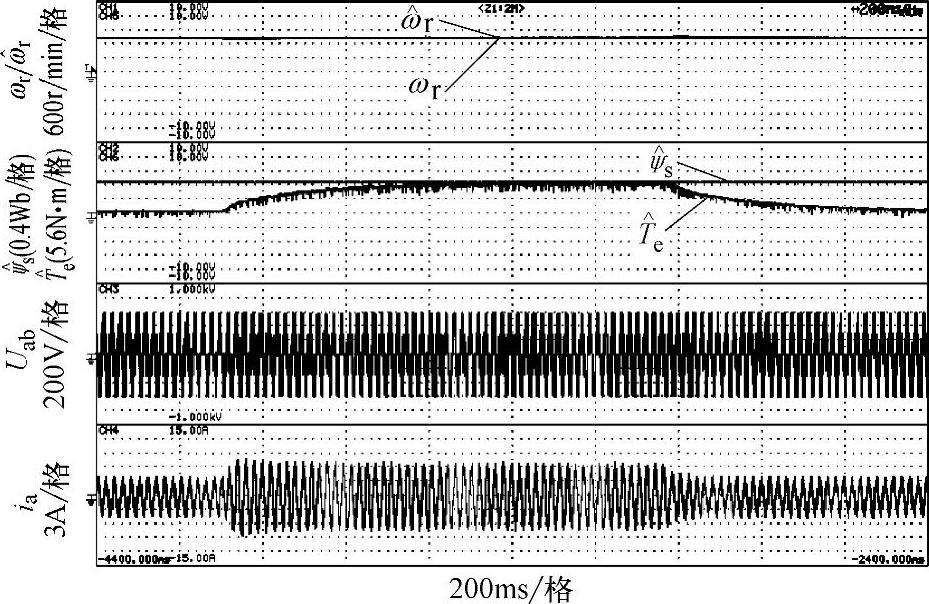
图7-26 1500r/min突加减100%额定负载
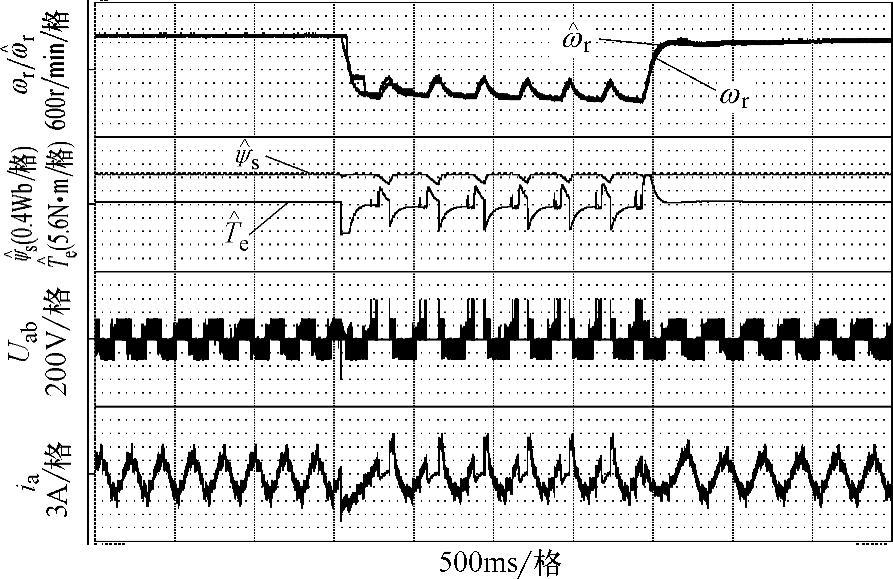
图7-27 150r/min正反转(https://www.daowen.com)
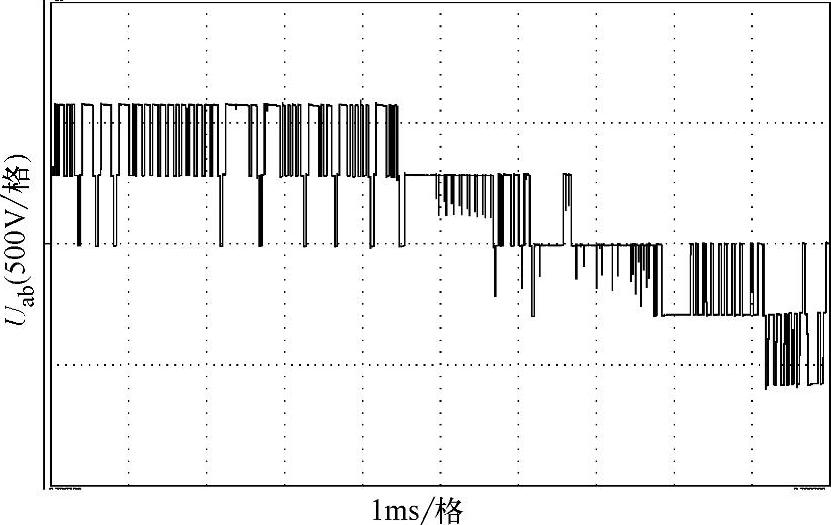
图7-28 1500r/min时线电压稳态波形(放大)
从图7-28所示的电机线电压稳态波形可以看出,线电压没有过高的跳变,证明了前面提出的矢量切换原则的正确性。最后还考察了基于优化矢量表DTC的低速性能,图7-29所示是电机在60r/min空载稳态的波形,图7-30所示是电机稳定运行在30r/min并且带100%额定负载的波形。可以看出,在低速时基于优化矢量表的DTC也具有较好的性能。
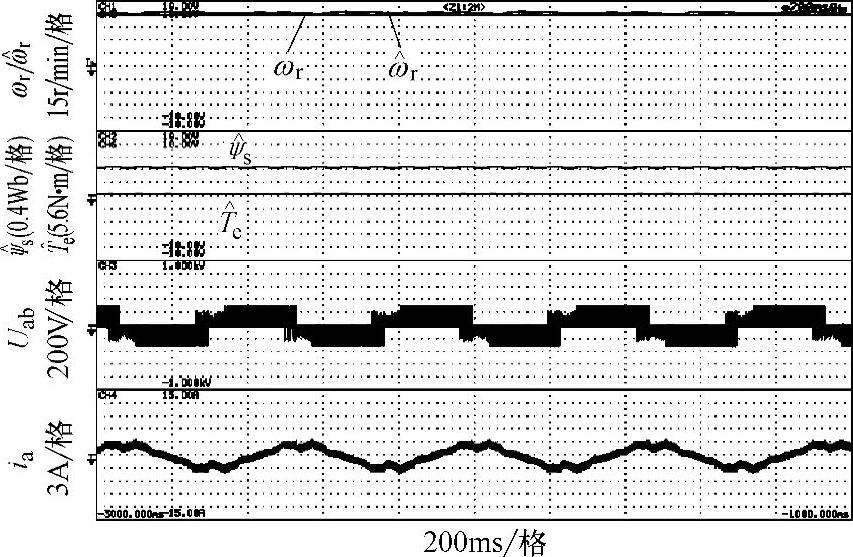
图7-29 60r/min空载稳态波形
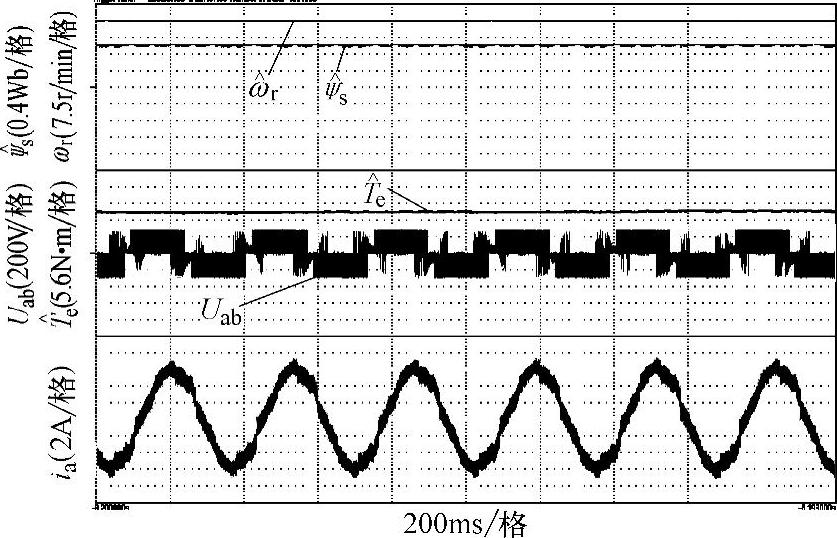
图7-30 30r/min满载稳态波形
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






