【摘要】:在MATLAB/Simulink中进行了仿真,电机参数为:2.2kW,2对极,380V/50Hz,定子电阻为2.8452Ω,转子电阻为2.4129Ω,互感为0.2687H,定子漏感和转子漏感均为12.8mH,转动惯量为0.01kg·m2。转速环采用FLC,定子磁通和转速观测采用带转矩观测的龙贝格观测器。图7-22 基于优化矢量表的三电平DTC系统框图起动电流过大是DTC中经常遇到的问题。图7-23 基于优化矢量表的三电平DTC仿真结果图7-23 基于优化矢量表的三电平DTC仿真结果(续)
在MATLAB/Simulink中进行了仿真,电机参数为:2.2kW,2对极,380V/50Hz,定子电阻为2.8452Ω,转子电阻为2.4129Ω,互感为0.2687H,定子漏感和转子漏感均为12.8mH,转动惯量为0.01kg·m2。系统框图如图7-22所示。转速环采用FLC,定子磁通和转速观测采用带转矩观测的龙贝格观测器。
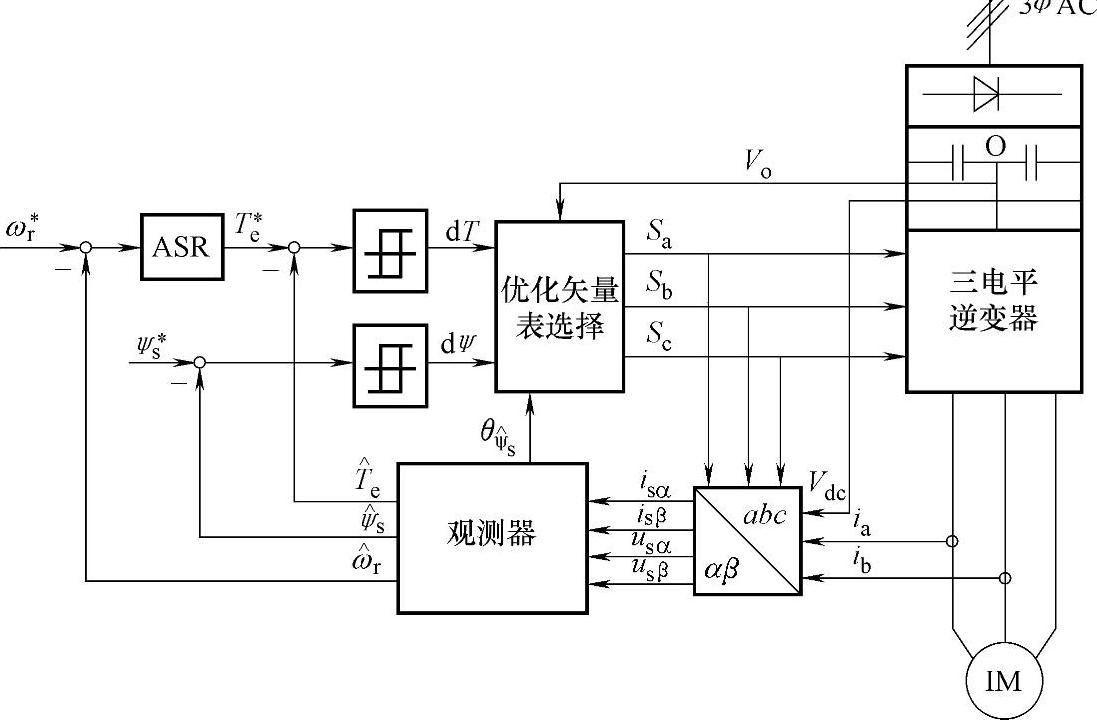
图7-22 基于优化矢量表的三电平DTC系统框图
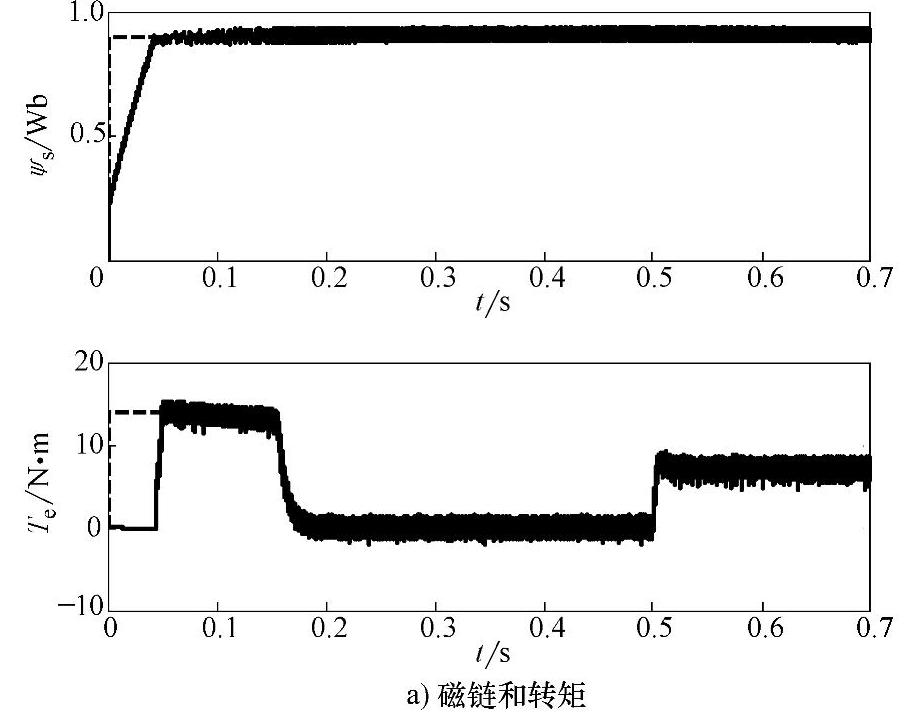
起动电流过大是DTC中经常遇到的问题。这里首先建立磁通,然后才起动电机。磁通建立的方式为直流预励磁,即采用斩波方式在零矢量和某一固定大矢量之间切换,电流超过一定幅值就切换到零矢量,有效地实现了起动电流限幅。电机为空载起动,在0.5s时突加50%额定负载。仿真结果如图7-23所示。从图7-23a和图7-23b可以看出,磁链和转速的动态响应十分迅速,实际值很好地跟踪了指令值,突加负载时转速略有波动后立即恢复到正常值。由于实行了直流预励磁,电机起动电流最大为9A左右,并且启动转矩很大。因为加入了矢量过渡措施,从图7-23c可以看出,中点电位得到了很好的控制,波动范围限制在±2V以内,从图7-23d所示的稳态线电压波形可以看出没有过高的电压跳变,证明了7.4.2节矢量切换原则的正确性,保证了三电平逆变器的安全稳定运行。
 (https://www.daowen.com)
(https://www.daowen.com)
图7-23 基于优化矢量表的三电平DTC仿真结果
图7-23 基于优化矢量表的三电平DTC仿真结果(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






