重写异步电机在静止坐标系下的定子电压方程为
us=Rsis+pψs (7-1)
由式(7-1)可知,定子电压直接控制着定子磁链,忽略定子电阻,则有定子磁链矢量的增量总是沿着定子电压矢量的方向变化。通过选择合适的矢量,可以控制定子磁链沿着预定的轨迹变化,从而控制定子磁链。进一步分析可知,当施加的电压矢量和当前定子磁链的夹角小于90°时定子磁链幅值增加,当施加的电压矢量和当前定子磁链的夹角大于90°时定子磁链幅值减少,当施加的电压矢量和当前定子磁链的夹角等于90°时定子磁链幅值不变。由于忽略了定子电压压降等因素,这只是比较粗略的分析,在低速时误差较大。
异步电机的电磁转矩可以用定子磁链和转子磁链的叉积表示为

式中 δsr——定转子磁链矢量的夹角。
当定转子磁链幅值不变时,可以通过快速改变它们之间的夹角实现快速改变转矩的目的。
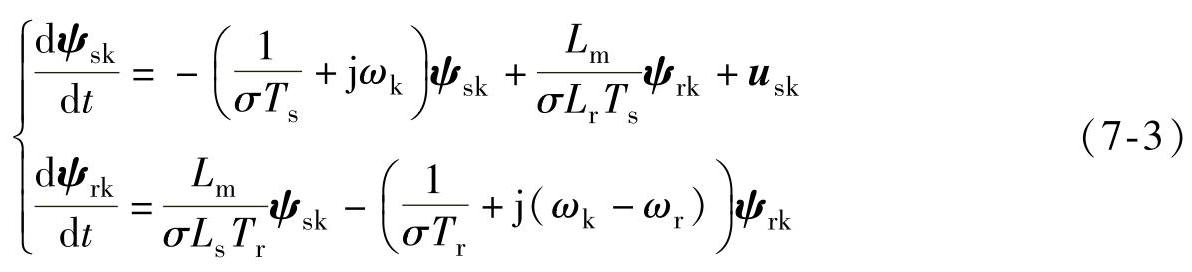
以定子磁链和转子磁链为状态变量描述的电机方程为
 (https://www.daowen.com)
(https://www.daowen.com)
式中 σ=1-L2m/(LsLr),Ts=Ls/Rs,Tr=Lr/Rr
令式(7-3)中的第二式中ωk=0,可得在静止坐标系下定转子磁链的关系为

式(7-4)表明在定子磁链矢量作用下,转子磁链矢量的动态响应具有一阶滞后特性。当定子磁链矢量发生变化时,转子磁链矢量的变化总是要滞后于定子磁链矢量的变化[5]。直接转矩控制就是检测磁链和转矩的变化,通过施加不同的定子电压矢量使定子磁链快速变化,进而改变定子磁链和转子磁链的夹角,从而达到控制转矩的目的。
一个典型的基本DTC系统框图如图7-20所示[45]。与矢量控制系统一样,它也是分别控制异步电机的转速和磁链,在给定转矩后面设置转矩控制内环,可以抑制磁链变化对转速子系统的影响,从而使转速和磁链实现近似解耦。由于采用了转矩反馈的砰砰控制,在加减速和负载变化的动态过程中,可以获得快速的转矩响应。
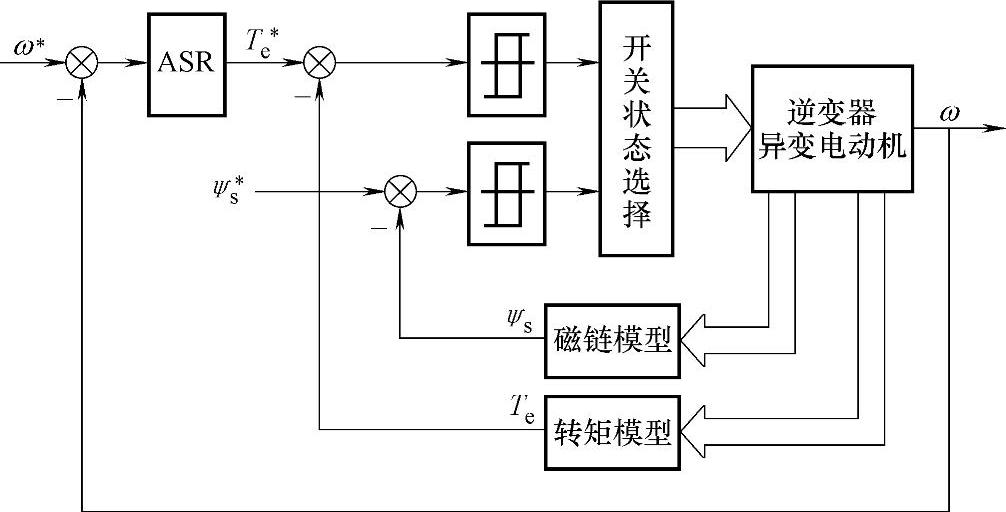
图7-20 基本DTC系统框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





