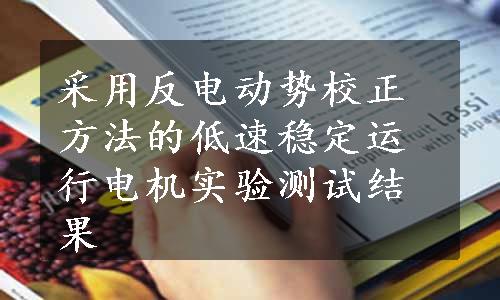
通过异步电机无速度传感器矢量控制综合实验平台来验证通过反电动势校正方法估算的转子磁链角和转速的准确性,并对整个无速度传感器矢量控制系统的低、高速动静态性能进行实验测试。图6-6所示为无速度传感器矢量控制系统的结构框图。
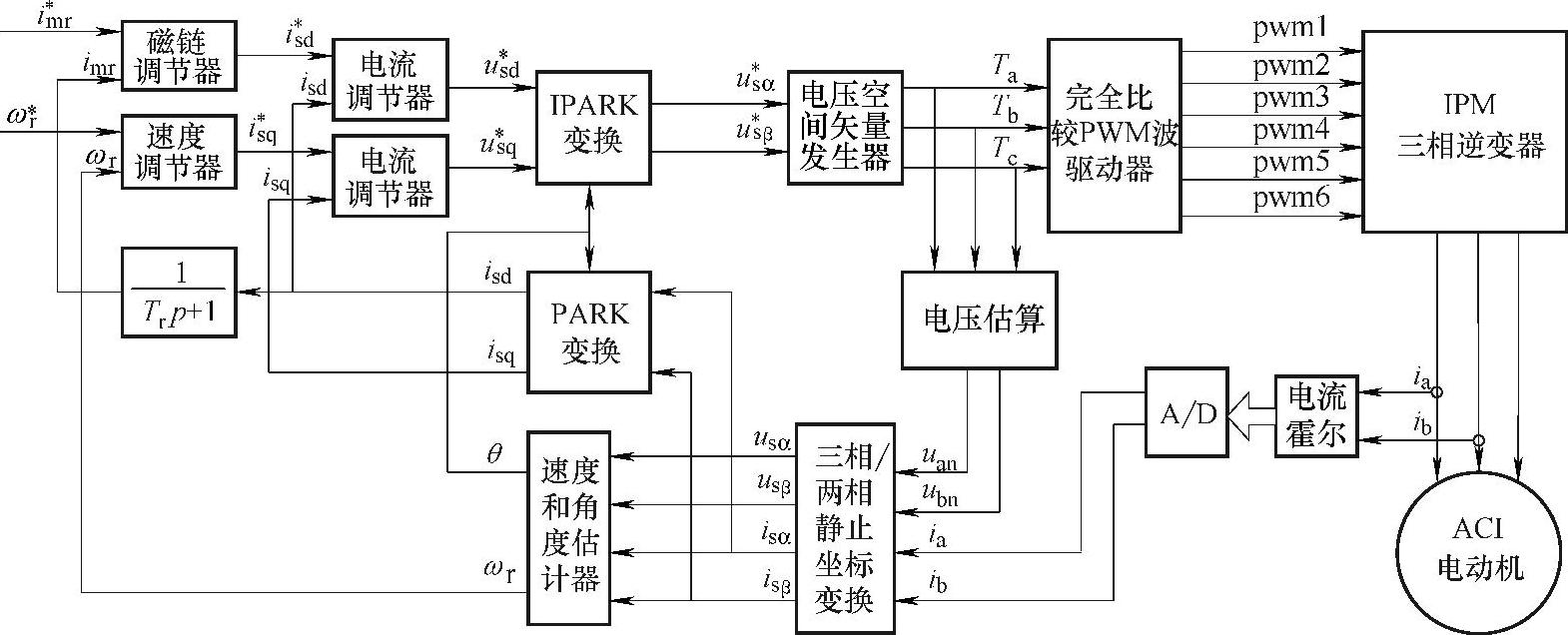
图6-6 无速度传感器矢量控制系统的结构框图
整个控制系统采用TI公司的TMS320F2812 DSP芯片来实现控制算法,实验所用异步电动机额定参数为:Pn=4kW;Un=380V;In=8.8A;ωn=1440r/min;极对数P=2。通过离线辨识获得电机参数为:Rs=1.252Ω;Rr=0.933Ω;Lm=0.1403H;Ls=Lr=0.1482H;J=0.0139kg·m2。DSP系统时钟设为150MHz,PWM调制频率为3kHz。功率模块采用三菱的PM50RSA120,电流信号检测采用LEM的霍尔传感器LA58-P,母线电压信号检测采用宇波的霍尔传感器CHV-25P。相电压信号通过PWM占空比和母线电压值来估算,转速和转子磁链角通过反电动势校正方法估算。
图6-7所示为电机在0.5Hz正反转运行时的给定速度、采样速度和估计速度的波形曲线比较。图中,Ch4(绿)为速度给定波形;Ch3(红)为编码器采样速度波形;Ch2(浅蓝)为估计速度波形;Ch1(蓝)为电流波形。图6-8所示为电机在0.5Hz正反转运行时的给定速度、采样速度和估计速度的波形曲线重合比较图。
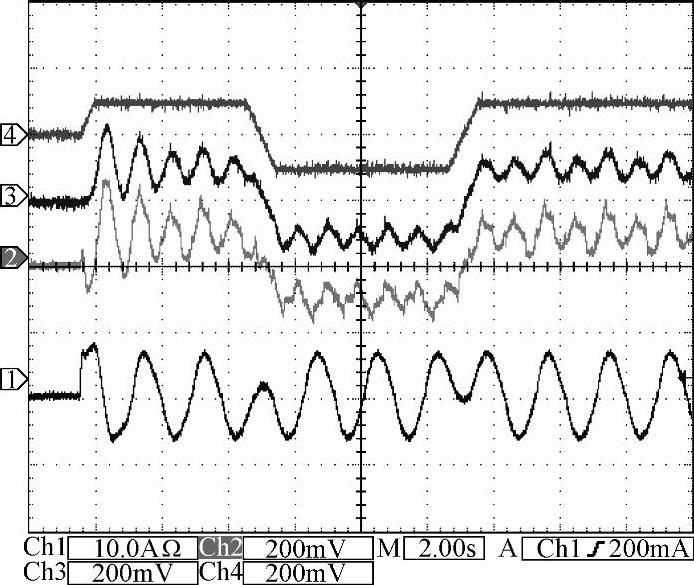
图6-7 0.5Hz正反转时的速度估计波形曲线
图6-8 0.5Hz正反转时的速度估计波形曲线重合
图6-9所示为电机在0.5Hz起动运行时的采样速度和估计速度比较波形及转子磁链角估计波形。图中,Ch4(绿)为转子磁链角估计波形;Ch3(红)为编码器采样速度波形;Ch2(浅蓝)为估计速度波形,为了便于直观比较,两速度曲线重叠;Ch1为电机起动运行时的电流波形。图6-10所示为电机在0.5Hz正反转运行时的转子磁链角估计波形。
图6-11和图6-12所示为电机在2Hz起动运行时的给定速度、采样速度和估计速度的跟踪比较波形及转子磁链角估计波形。图6-13和图6-14所示为电机在2Hz正反转运行时的给定速度、采样速度和估计速度的跟踪比较波形及转子磁链角估计波形。
图6-15所示为电机在5Hz起动和停止运行时的给定速度、采样速度和估计速度的跟踪比较波形。图6-16所示为电机在5Hz正反转运行时的采样速度和估计速度的跟踪比较波形及转子磁链角估计波形。
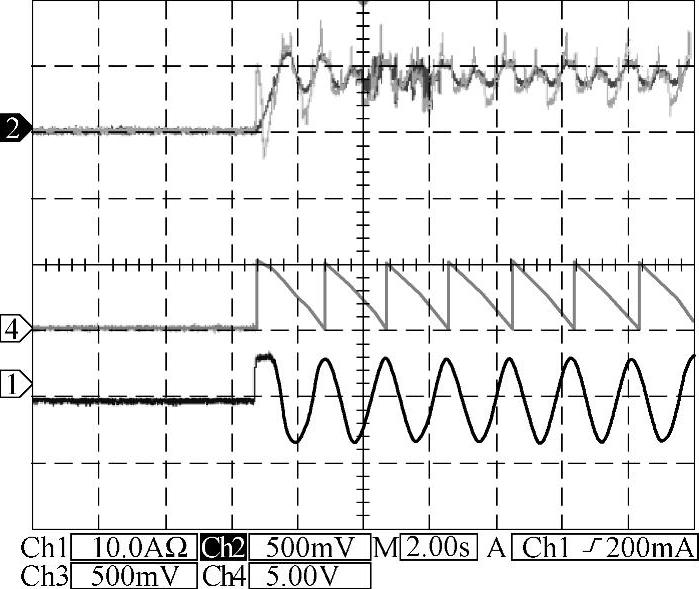
图6-9 0.5Hz起动时速度和角度估计波形
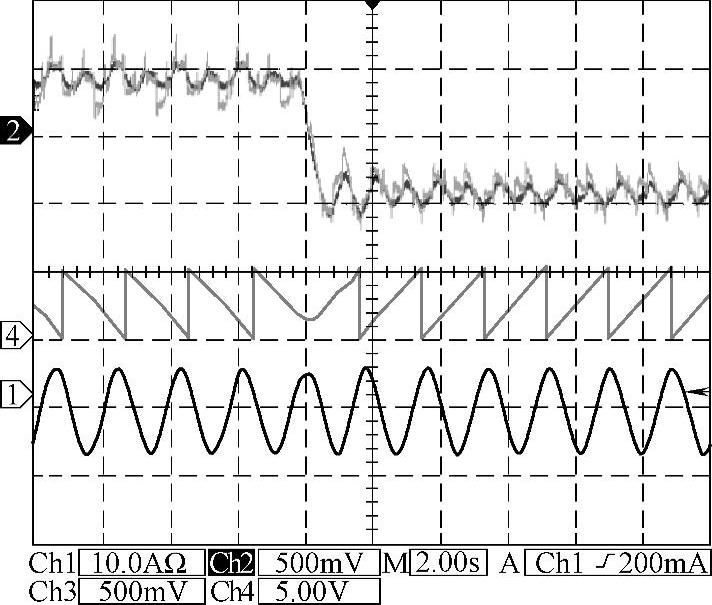
图6-10 0.5Hz正反转时速度和角度估计波形
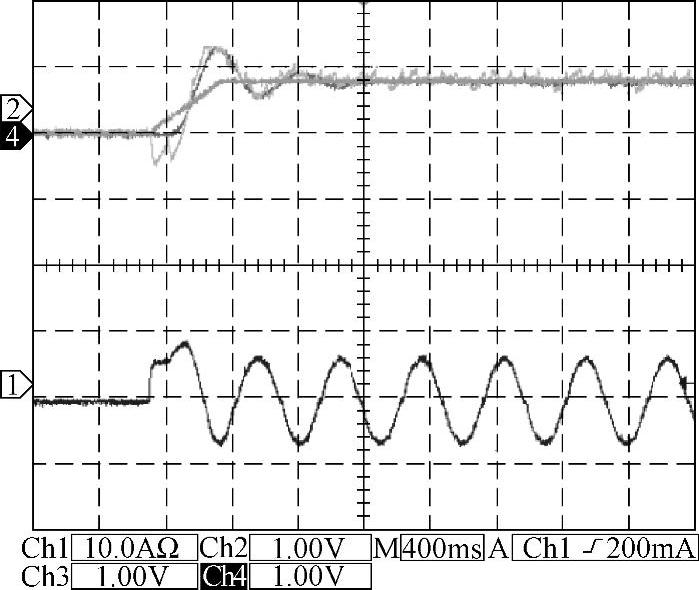
图6-11 2Hz起动时速度估计波形(www.daowen.com)
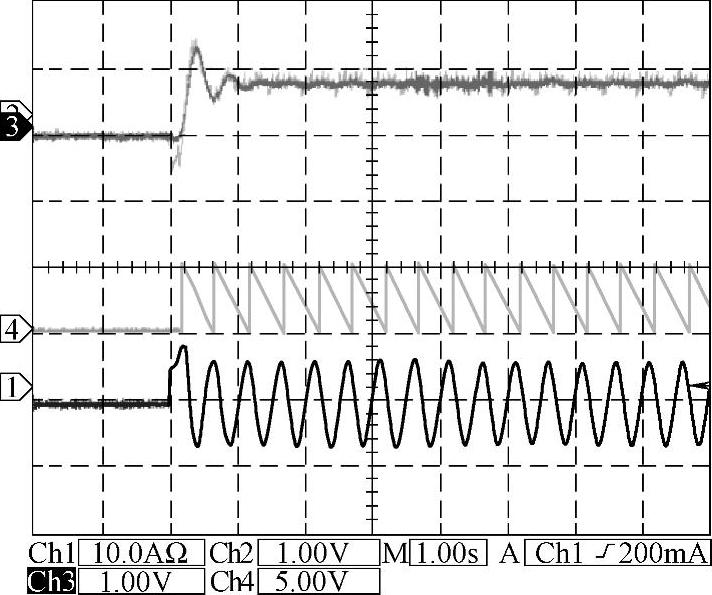
图6-12 2Hz起动时速度和角度估计波形
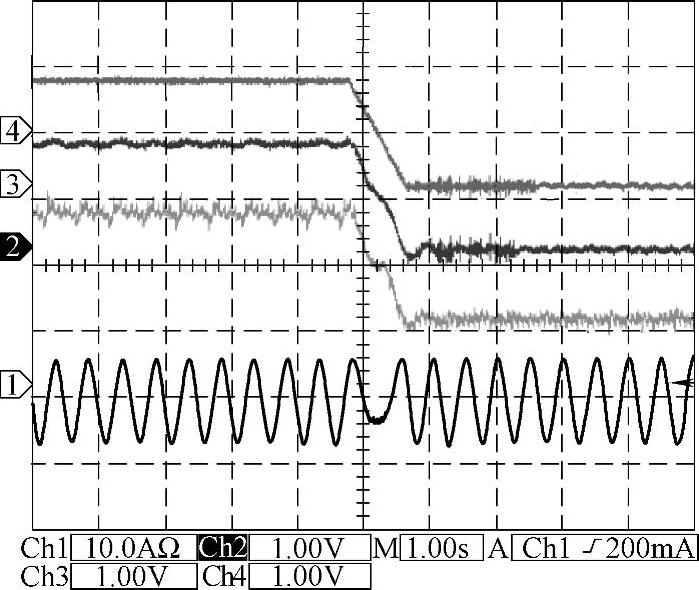
图6-13 2Hz正反转时的速度估计波形
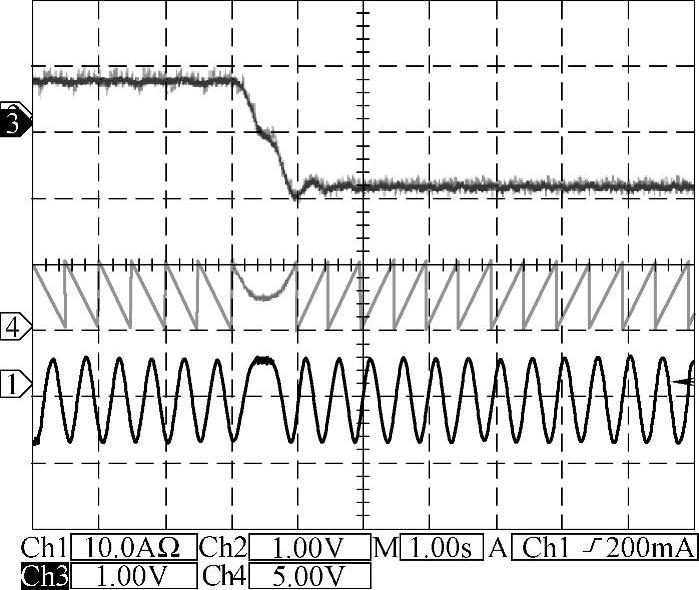
图6-14 2Hz正反转时速度和角度估计波形
图6-17所示为电机在5Hz加减载运行时的采样速度和估计速度的跟踪比较波形及转子磁链角估计波形。图6-18所示为电机在5Hz加减载并带载正反转运行时的采样速度和估计速度的跟踪比较波形及转子磁链角估计波形。
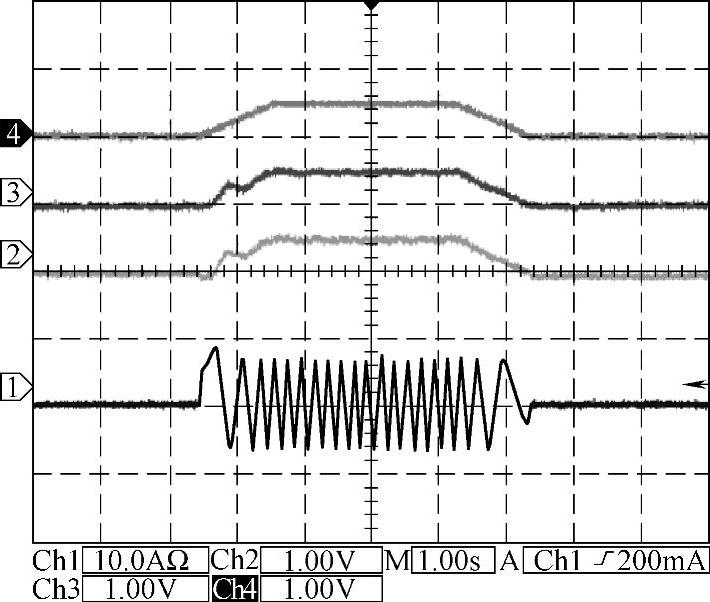
图6-15 5Hz起动停止时速度估计波形
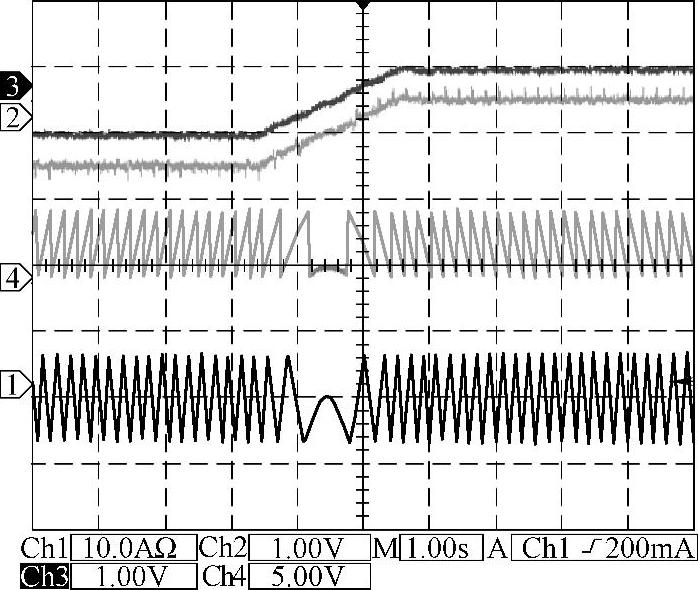
图6-16 5Hz正反转时速度和角度估计波形
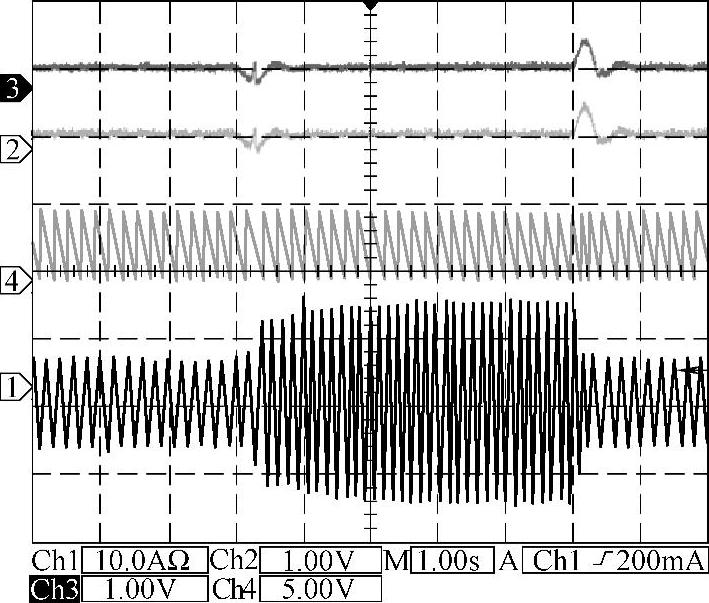
图6-17 5Hz加减载时速度估计波形
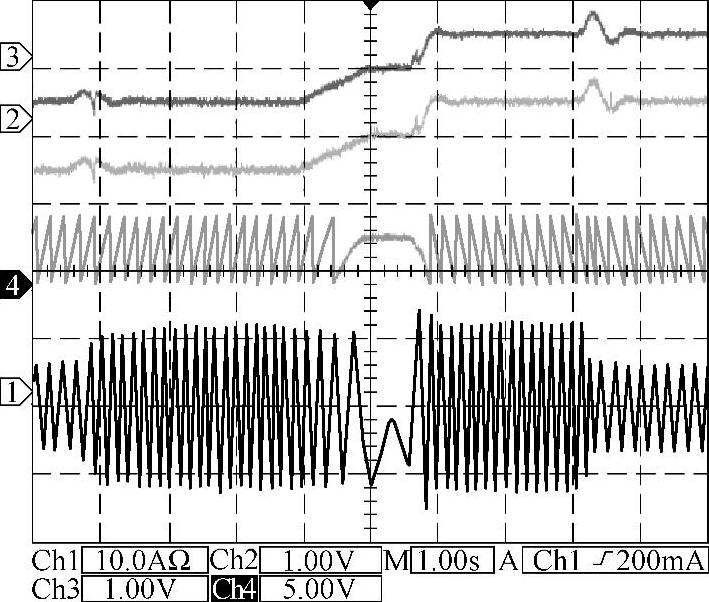
图6-18 5Hz加减载带载正反转时速度估计波形
以上实验测试结果表明,采用反电动势校正方法对速度和转子磁链角进行估算,并运用带电压补偿的相电压估算方法,电机可以实现0.5Hz低速稳定运行,估计的速度与采样速度的大小和相位基本一致,波动小,跟踪响应快,转子磁链角估计曲线比较平滑。转子磁场定向准确,电流波形稳定正弦,电机运行平稳。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






