反电动势在不同坐标系下的轴分量如图6-1所示。图中,Esd和Esq为估算的反电动势的d-q轴分量。当两相同步旋转坐标系经过转子磁链定向后有θ′=θ。励磁电流恒定时,转子磁链保持不变,反电动势的d轴分量Esd应为零。将式(6-2)代入式(6-9)可以得到反电动势在d-q轴的分量为

如果估算得出的反电动势d轴分量Esd不为零,说明转子磁场定向不准确,估计的转子磁链角与真实转子磁链角有误差,两者之间的误差角为Δθ=θestim-θ。在图6-1中,估算的反电动势d轴分量Ed>0,使得Δθ>0。
如果Ed<0,则Δθ<0,如图6-2所示。
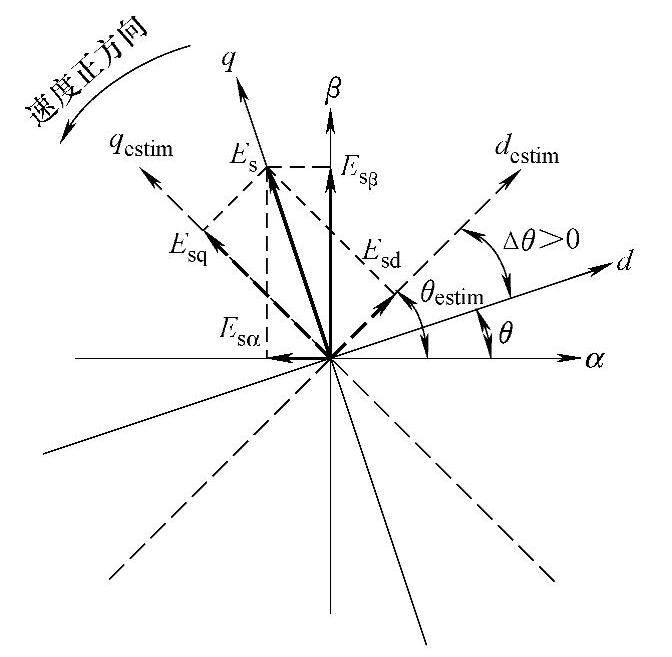
图6-1 Esd>0时的角度估计和正速度方向
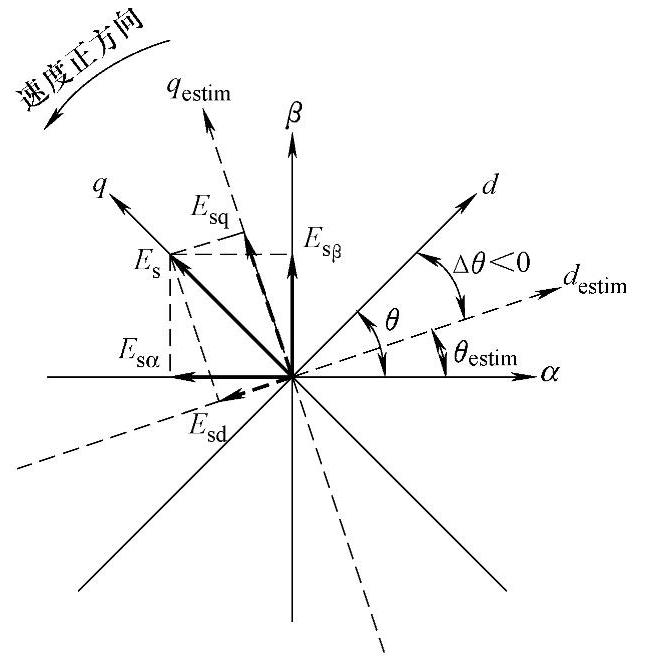
图6-2 Esd<0时的角度估计和正速度方向
在对反电动势估算值与实际反电动势值之间的误差进行校正时,如果采用一种简单方法,即将误差Δθ直接从估计角度θestim中减去,可能会导致数值的不稳定。解决角度估计校正问题的一个办法是用速度代替角度。由于角度是速度的积分,这种方法可以避免直接数值处理带来的不稳定性。
由式(6-10)可得出同步转速的计算关系式为

如果角度估计有误差,将会产生非零的Esd,而且Esd越大,则角度估计误差就越大。解决的办法是在估算同步转速时加入一个反电动势校正项,即

根据电机旋转方向和估算的反电动势d轴分量Esd的正负,可以确定同步转速估计时反电动势校正项的取值,如表6-1所示。
表6-1 反电动势校正项参考表
 (https://www.daowen.com)
(https://www.daowen.com)
当电机正速方向运行时,Esq>0。如果估算出来的Esd>0,会使估算的转子磁链角θestim比真实转子磁链角θ偏大,即Δθ>0,如图6-1所示。由于是正速运行,说明估算的同步转速偏大,因此可加入一个负值校正项 ,来减少估算的同步转速值。如果估算出来的Esd<0,会使估算的转子磁链角θestim比真实转子磁链角θ偏小,即Δθ<0,如图6-2所示。由于是正速运行,说明估算的同步转速偏小,因此可加入一个正值校正项
,来减少估算的同步转速值。如果估算出来的Esd<0,会使估算的转子磁链角θestim比真实转子磁链角θ偏小,即Δθ<0,如图6-2所示。由于是正速运行,说明估算的同步转速偏小,因此可加入一个正值校正项 ,来增大估算的同步转速值。
,来增大估算的同步转速值。
当电机反速方向运行时,Esq<0。如果估算出来的Esd<0,会使估算的转子磁链角θestim比真实转子磁链角θ偏大,即Δθ>0,如图6-3所示。由于是反速运行,说明估算的同步转速偏小,因此可加入一个负值校正项 ,来增大估算的同步转速绝对值。如果估算出来的Esd>0,会使估算的转子磁链角θestim比真实转子磁链角θ偏小,即Δθ<0,如图6-4所示。由于是反速运行,说明估算的同步转速偏大,因此可加入一个正值校正项
,来增大估算的同步转速绝对值。如果估算出来的Esd>0,会使估算的转子磁链角θestim比真实转子磁链角θ偏小,即Δθ<0,如图6-4所示。由于是反速运行,说明估算的同步转速偏大,因此可加入一个正值校正项 ,来减少估算的同步转速绝对值。
,来减少估算的同步转速绝对值。

图6-3 Esd<0时的角度估计和反速度方向
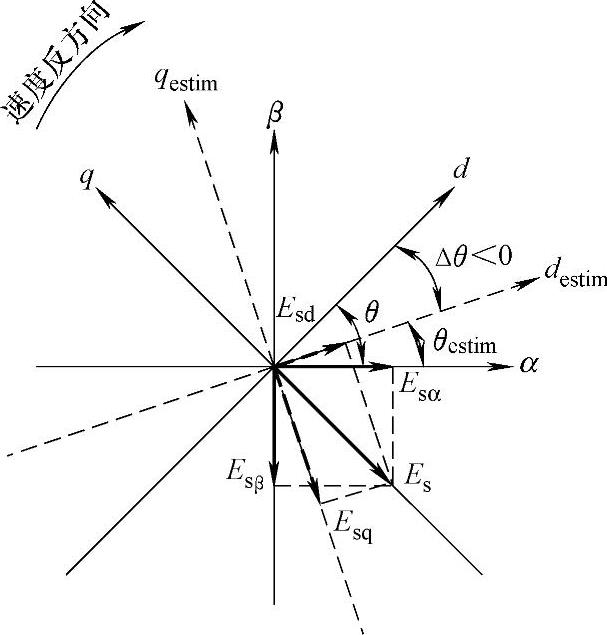
图6-4 Esd>0时的角度估计和反速度方向
将估算的同步转速积分,可得转子磁链角为
θ=∫ωedt (6-13)
由经过转子磁场定向的两相同步旋转坐标系下的转差公式为
由此可以得到电机的电角度转速为
ωr=ωe-ωsl (6-14)
转子磁链角度和速度估计框图如图6-5所示。
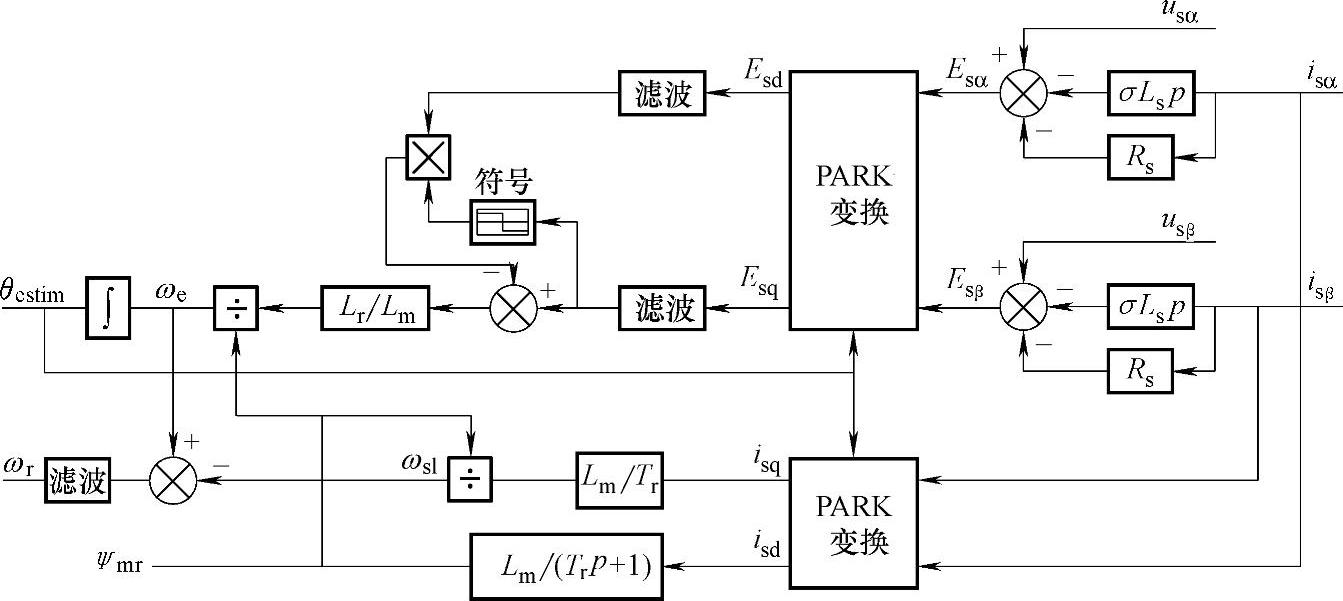
图6-5 转子磁链角度和速度估计框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





