在前面理论研究和计算机仿真的基础上,本节从实验的角度对矢量控制中的三种控制器:PI、滑模控制器和模糊控制器进行了深入比较,包括起动性能、高速正反转、低速运行、突加负载干扰、参数不匹配时的运行等几方面。实验在三电平中点钳位逆变器驱动的异步电机—直流电机机组上进行,实验条件和参数同第2章,采用引入转矩估计的滑模观测器,基于滑模控制器和滑模观测器实现了全滑模无速度传感器矢量控制。
图5-24所示是分别采用三种控制器时电机空载从静止到1500r/min的实验波形对比,从上至下分别为转子磁链和转子转速。先采用直流预励磁的方法建立磁通,然后起动电机,保证足够的起动转矩。从图5-24a可以看出,采用PI时转速有超调,而且磁链有一定波动和静差,而采用SMC和FLC时,磁链和转速具有良好的动态响应和稳态精度,尤其SMC的动态响应良好,几乎没有超调,但磁链和转速的稳态精度相比FLC略差,而采用FLC时则具有最好的稳态精度,仅转速存在极小超调。这与采用定点DSP和线性插值实现FLC有关,加细插值的表格可以进一步提高精度,但同时加大了对存储量的要求。
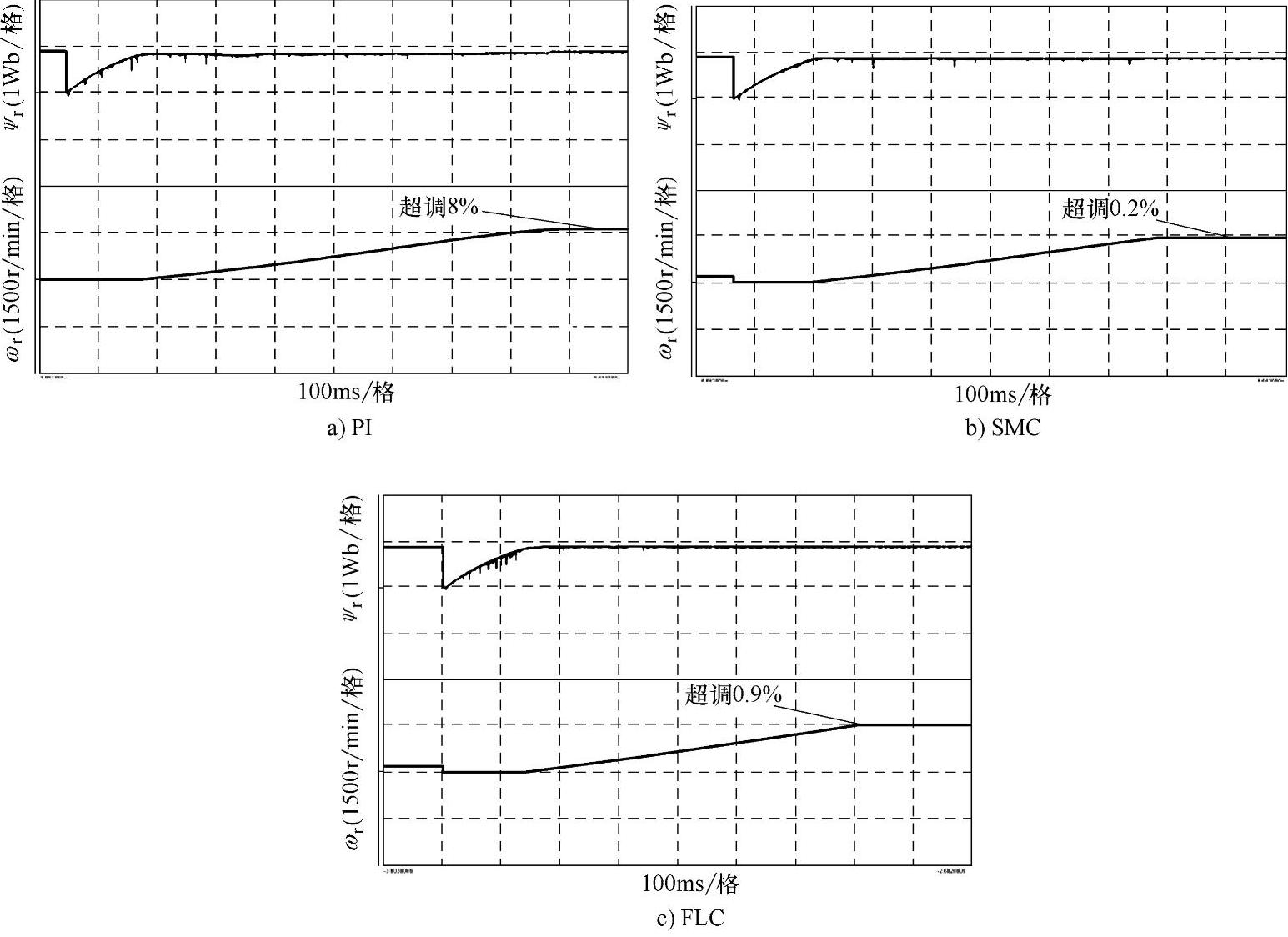
图5-24 0→1500r/min
图5-25和图5-26考察了采用三种控制器分别在高速1500r/min和低速150r/min时正反转的性能。从图5-25中可以看出,采用PI时转子磁链在正反转中间过零点时有一定波动,而采用SMC和FLC时转子磁链波动相对较小,证明SMC和FLC比PI具有更好的稳态性能;另外,采用PI时转速依然存在超调现象。在图5-26所示的低速运行中,采用FLC和SMC对磁链波动的抑制与PI相比更加明显,其中FLC的稳态性能最为出色;从转速波形可以看出,PI和SMC在0.5s内都尚未进入稳态,整定时间较长,而FLC只需不到0.2s则很快进入无差稳态,具有最高的稳态精度和最短的整定时间。
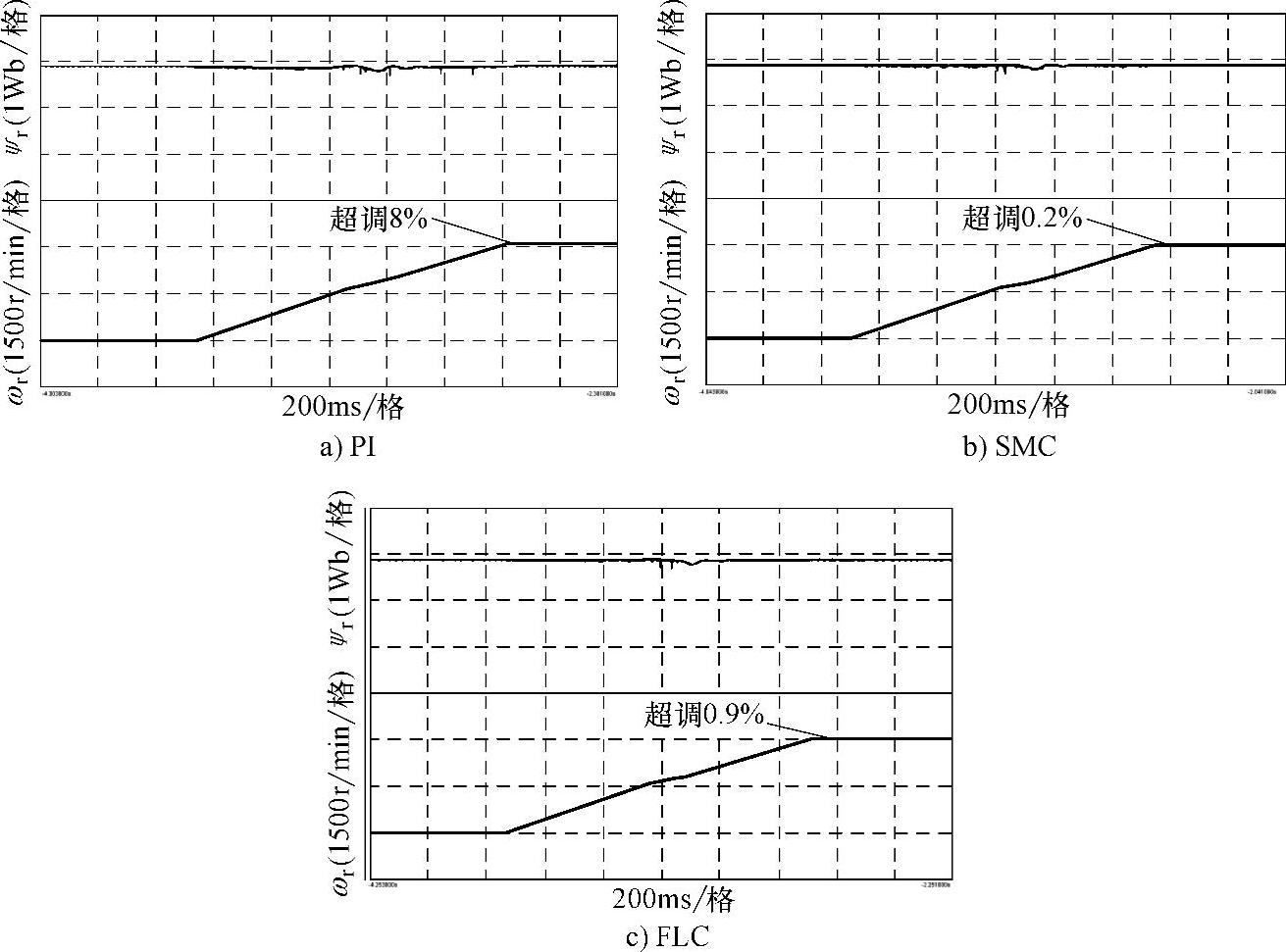
图5-25 1500r/min正反转
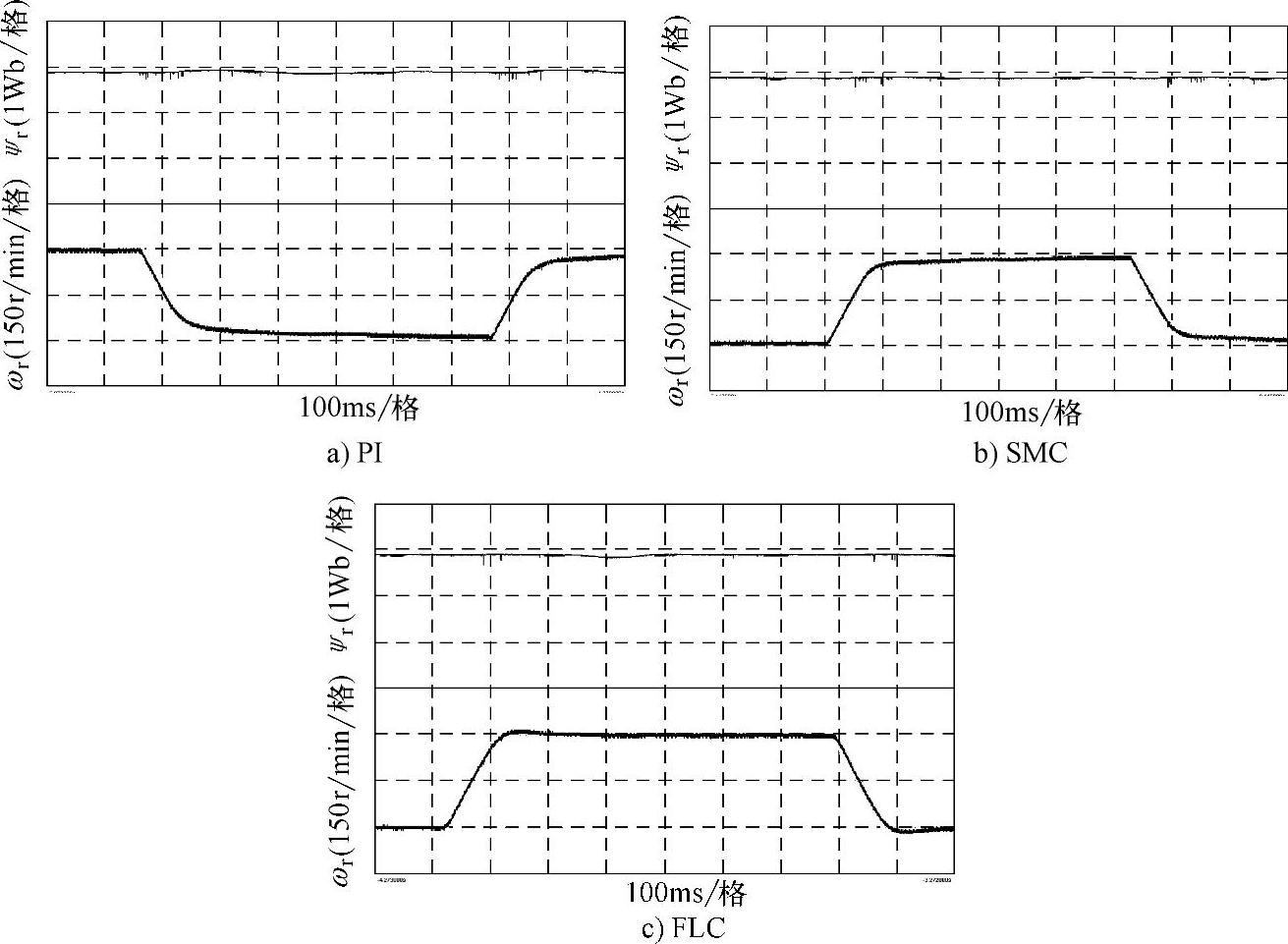
图5-26 150r/min正反转
图5-27进一步在更低速15r/min下对三种控制器进行了比较。从图中估计转速波形可以看出,FLC的稳态精度最高,波形最光滑,SMC的纹波比PI要小,但稳态误差比PI要大。磁链波形也是FLC最平稳,SMC和PI相当。可以看出,在极低速时FLC具有最优异的性能。(https://www.daowen.com)
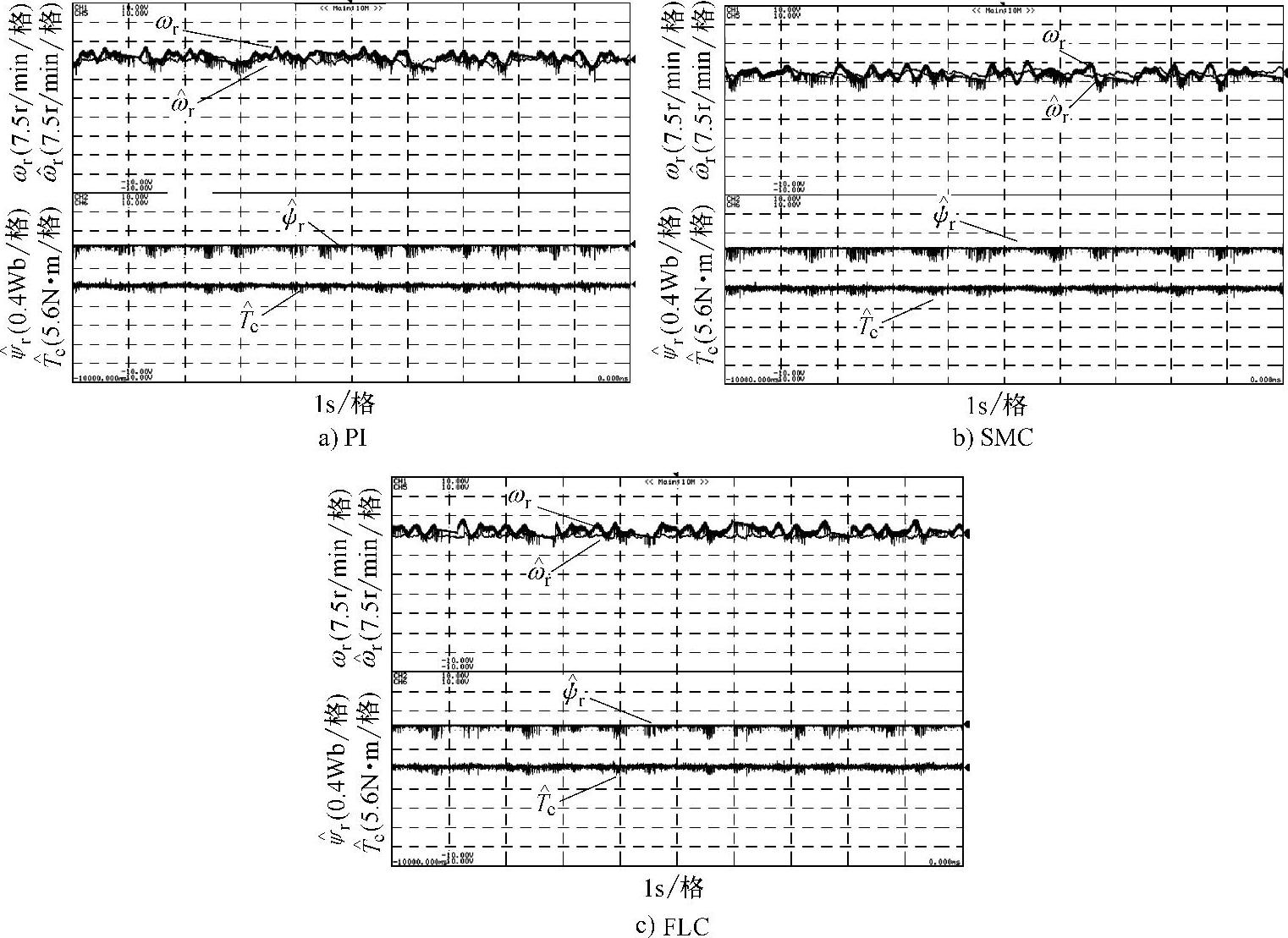
图5-27 15r/min空载稳态
图5-28考察了三种控制器在突加负载时的抗干扰性能。在电机稳定运行在空载1500r/min时,突加60%额定负载,从图5-28可以看出采用PI控制器时,转速出现了跌落,需要经过较长时间才会恢复到原来稳态,SMC也出现了一定转速降落,但相对较小,而FLC在转速稍微跌落后立即恢复到原来的稳态,表现出极强的抗干扰能力。说明SMC和FLC都可以提供较好的抗外部干扰能力,尤其FLC,具有最佳的抗负载干扰能力。
最后,本节还考察了三种控制器在电机参数发生变化时的控制性能。以电机从静止起动到1500r/min为例,图5-29给出了在电机定子和转子电阻比实际值都变大20%后的起动实验波形,SMC和FLC依然表现出优于PI的动态性能和稳态精度,证明了SMC和FLC对参数变化的鲁棒性,同时表明本节采用的基于转矩观测的滑模观测器对电机参数变化具有良好的鲁棒性。
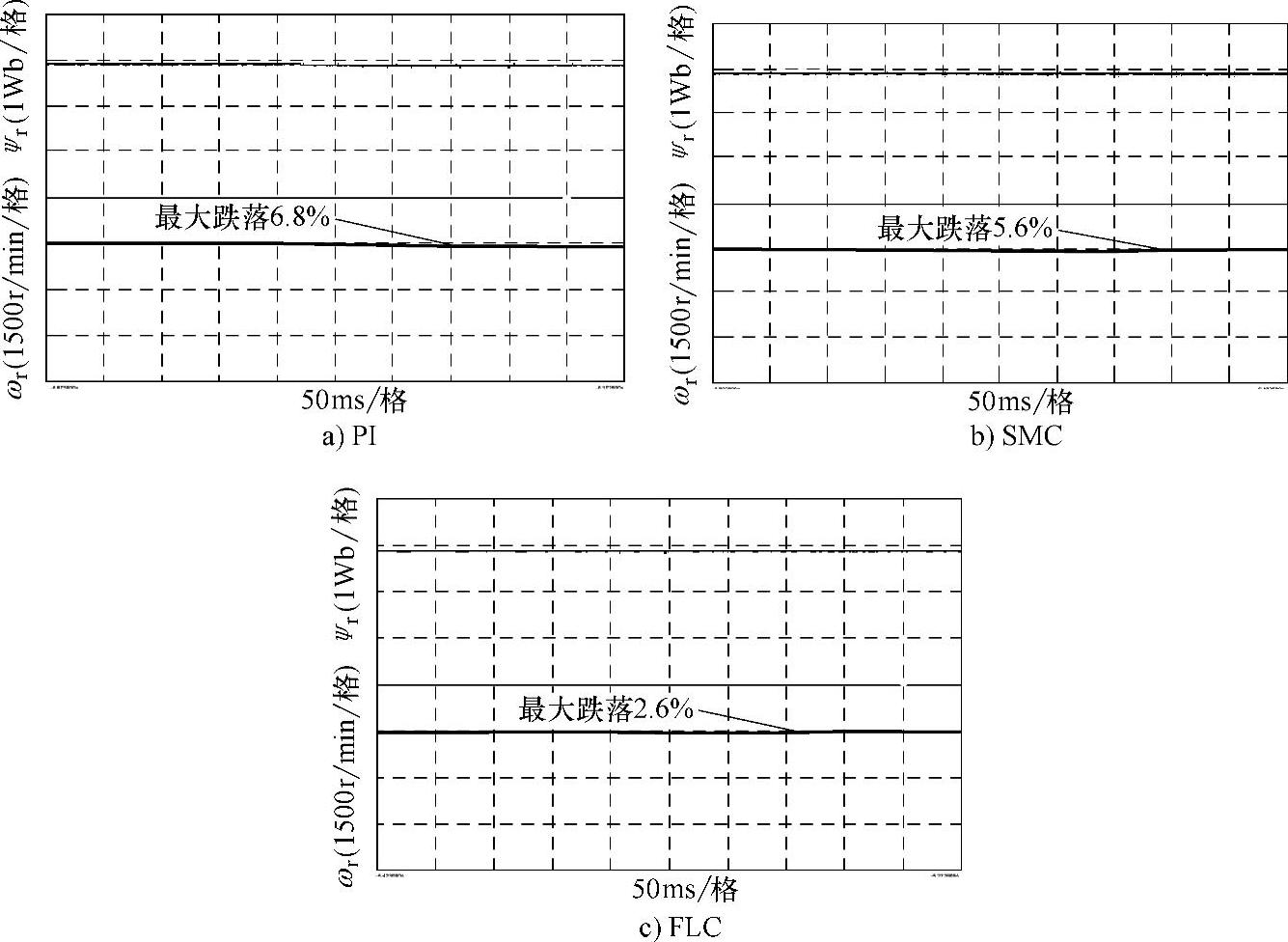
图5-28 1500r/min稳态突加负载
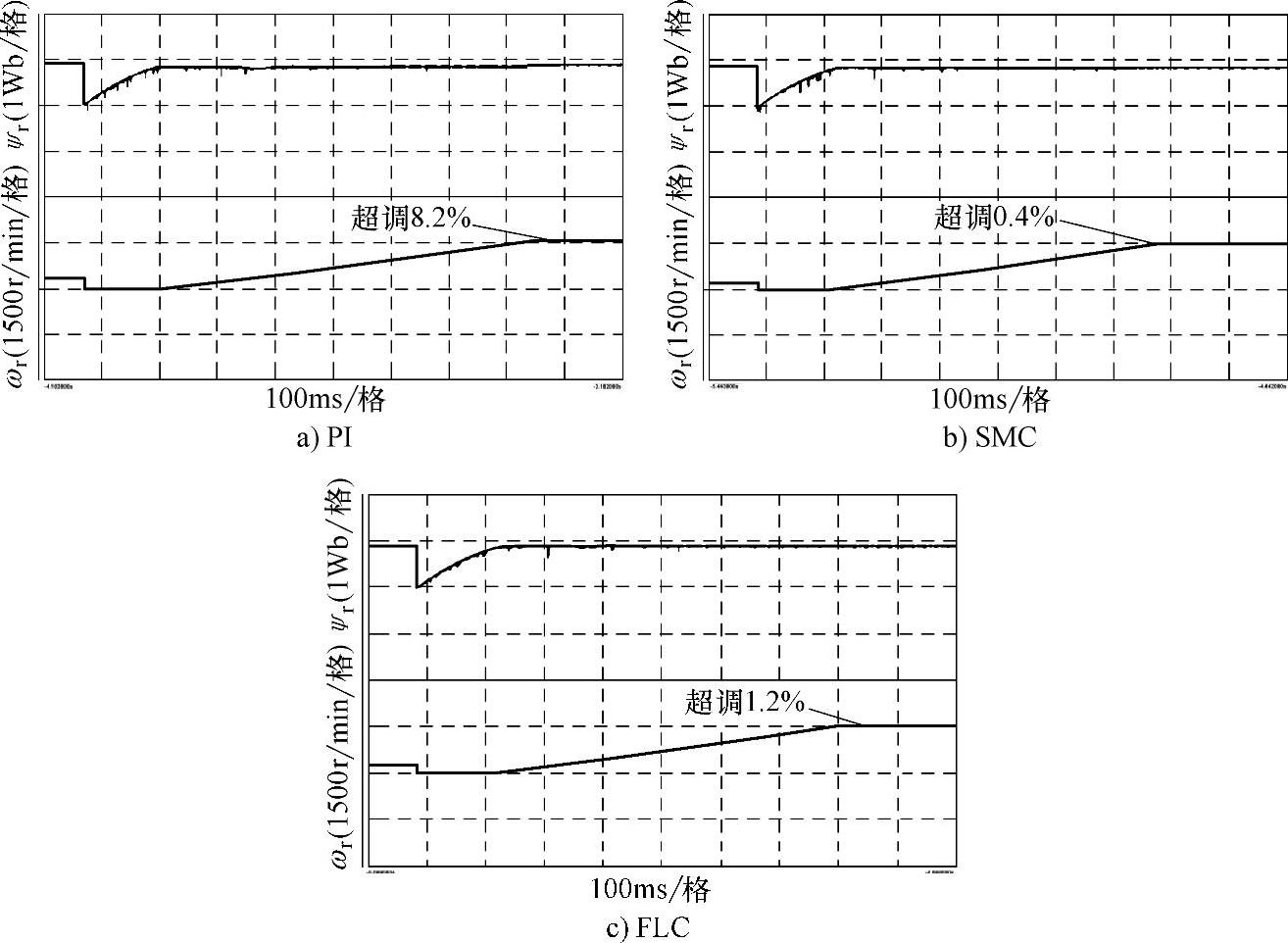
图5-29 电机参数变化时的起动波形
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






