【摘要】:经过变换后可得d轴按任意方向定向时的d-q同步旋转坐标系下的异步电动机数学模型。将磁链方程式代入式中,得到d-q坐标系下的电压—电流方程为3.转矩方程
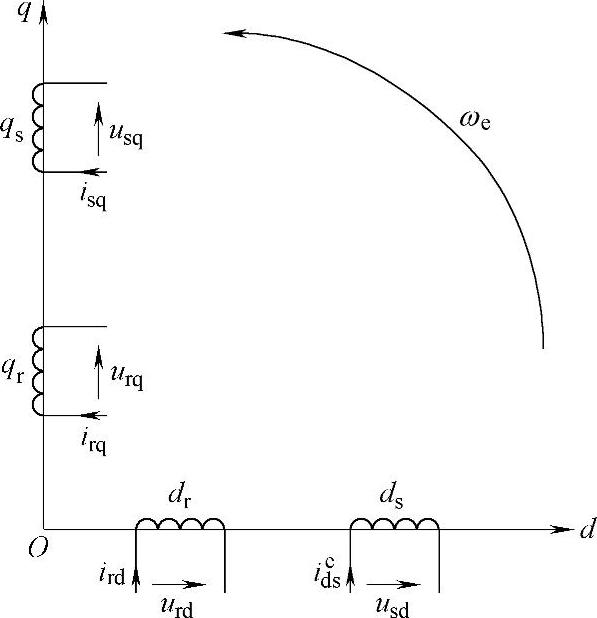
图2-6 异步电动机在两相同步旋转坐标系上的物理模型
我们已经通过CLARKE坐标变换将三相静止坐标系下电机数学模型中的定转子电压、电流、磁链和转矩都变换到了两相静止坐标系α-β上,下面再用PARK坐标变换将两相静止坐标系上的这些变量变换到两相同步旋转坐标系d-q轴上。异步电机在两相旋转坐标系上的物理模型如图2-6所示。其意义在于消除定、转子绕组之间的耦合关系,使磁链方程的电感矩阵线性化。经过变换后可得d轴按任意方向定向时的d-q同步旋转坐标系下的异步电动机数学模型。
1.磁链方程
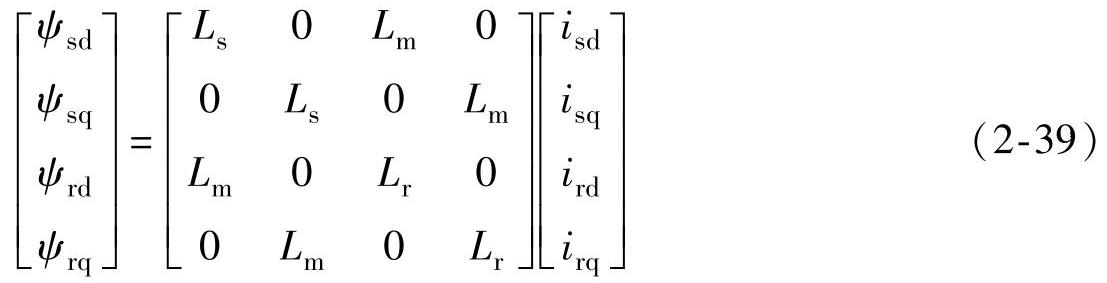
式中 ψsd,ψsq——两相同步旋转坐标系下定子磁链矢量d、q轴分量;
ψrd,ψrq——两相同步旋转坐标系下转子磁链矢量d、q轴分量;
ird,irq——两相同步旋转坐标系下转子电流矢量d、q轴分量。
2.电压方程
由两相静止坐标系下的电压方程,经过PARK变换,得到d,q坐标系下的电压方程为(https://www.daowen.com)
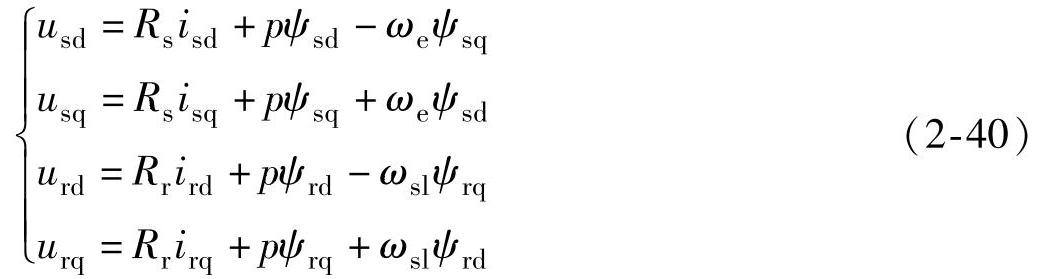
式中 usd,usq——两相同步旋转坐标系下定子电压矢量d、q轴分量。
urd,urq——两相同步旋转坐标系下转子电压矢量d、q轴分量,对于笼型电机,转子内部是短路的,urd=urq=0;
ωe——定子旋转磁场同步电角速度;
ωsl——转子转差电角速度,ωsl=ωe-ωr。
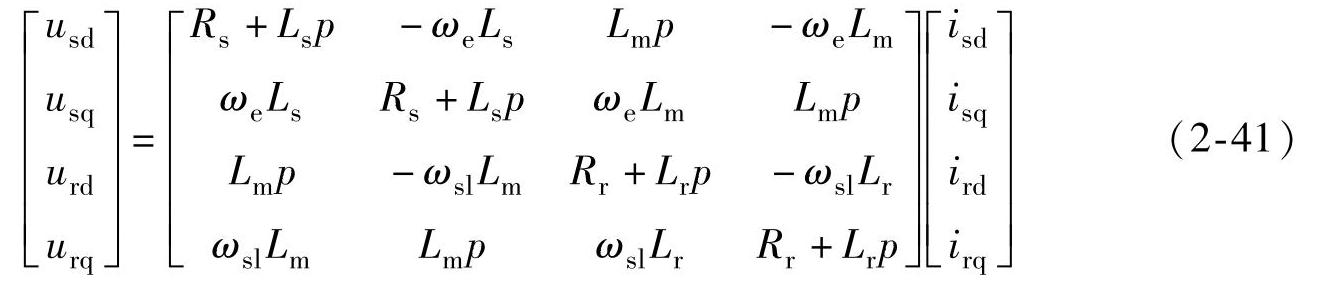
将磁链方程式(2-39)代入式(2-40)中,得到d-q坐标系下的电压—电流方程为
3.转矩方程

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







