参照系理论是电机分析的普遍理论,根据研究对象和研究目标的不同,在应用中所选取的参照系也是不同的。一个参照系的选取不仅要确定其旋转速度,还要确定参考轴线的位置[7]。根据参照系的旋转速度划分,常用的参照系有同步旋转参照系、静止参照系、转子速参照系。这些常用参照系都是任意速旋转参考系的特例。根据参考轴的位置,选取的参照系也会有新的特点。例如,在同步旋转参照系中选取转子磁链轴线作为d轴,可以把异步电机的定子电流解耦成励磁分量和转矩分量,从而为电机控制提供方便。
在实际的应用中一种参照系往往是不能满足要求的。以异步电机的矢量控制系统为例,就用到了三相静止参照系、两相静止参照系和两相旋转参照系,共三种参照系。在控制过程中,三种参照系经常需要相互变换,由此就产生了如何实现各种参照系之间变换的问题。下面就来讨论常用参照系之间的转换关系。
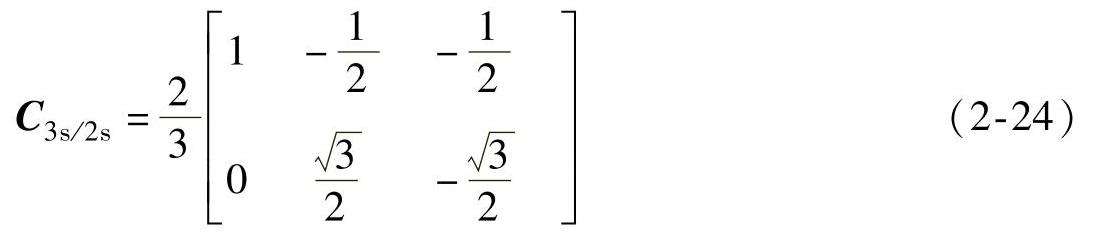
1.三相静止参照系与两相静止参照系的变换
静止参照系,顾名思义其旋转角速度为0。选定定子A相作为d轴,就得到了两相静止参照系,为了与同步旋转dq坐标有所区分,记为α-β参照系。这种从三相到两相静止参照系的变换又称为CLARKE变换,其变换矩阵为
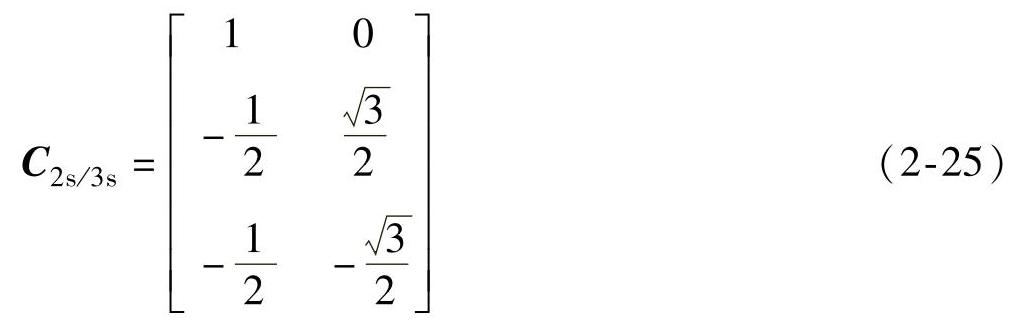
从两相静止参照系到三相静止参照系的变换矩阵为
2.三相静止参照系与两相同步旋转参照系的变换
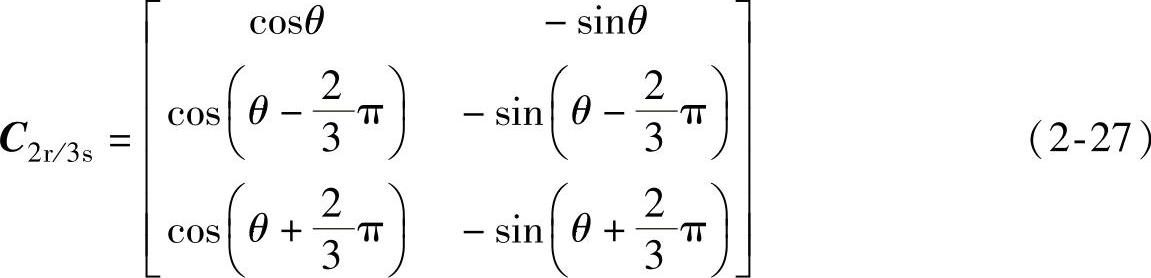
两相同步参照系具有与电源基频角频率相同的旋转角速度ωe,记作d-q轴参照系。d轴与a轴之间的夹角为θ。由式(2-22)可以得到三相静止参照系到两相同步旋转参照系的变换关系为

其反变换为
3.两相静止参照系与两相同步旋转参照系的变换
设三相静止参照系下的变量Fabc,在两相静止参照系和两相旋转参照系中对应的变量分别为Fαβ和Fdq。三个参照系的关系如图2-4所示。(https://www.daowen.com)
由前面推导可得下面的关系:
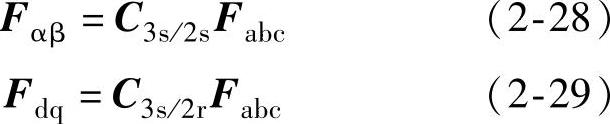
将Fabc=C2s/3sFαβ带入式(2-29)中可以得到
Fdq=C3s/2rC2s/3sFαβ (2-30)
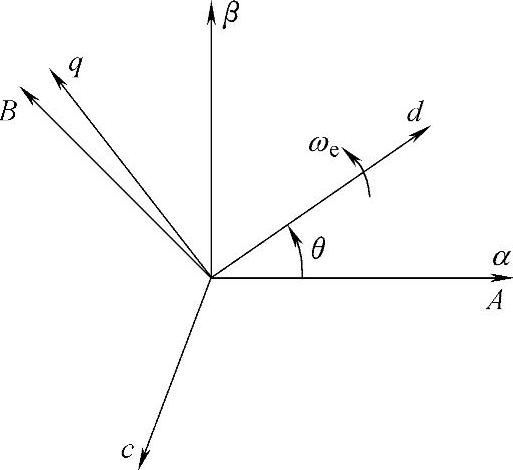
图2-4 参照系之间的关系
将式(2-25)和式(2-26)代入式(2-30)得到

式中 θ——d轴与a相的夹角, 。
。
其反变换为

需要补充的是,转子速参照系和两相静止参照系、三相静止坐标系的变换关系与同步参照系的变换关系具有相同的形式,只是角度的不同。在转子参照系的变换关系中,有
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






