两电平三相变换器是最为成熟的功率变换器,在中小功率等级的电动机控制中得到了广泛应用。各大半导体厂商几乎都有电压和功率等级不同的三相两电平变换器产品,极大地方便了两电平变频器的生产和制作。为了进一步减少体积,降低成本和提高可靠性能,很多公司将控制和功率器件集成在同一块芯片上,形成了功率集成电路(PIC)。像专用功率器件模块和变频调速装置逆变回路部分用到的智能功率模块(IPM),把功率器件、驱动、控制、保护电路都集成在一起,给应用带来了很大便利。
虽然传统的两电平变换器结构日趋成熟,已得到广泛应用,但受制于器件的耐压和容量限制,用于大功率场合存在一些问题。为了获得高压大功率,两电平拓扑不得不采用器件串联或者并联技术,从而带来动静态均压和均流等问题。另外,还有过高的dv/dt和共模电压,降低了系统的可靠性。20世纪80年代以后发展起来的多电平变换器,与传统两电平变换器相比,可以降低器件的承压,易于实现高压大容量,而且输出电压有更多的电平数,谐波含量小,因此在高压领域得到了迅速的发展。
三电平逆变器主电路及其方案最早由德国学者Holtz于1977年提出,其中每相桥臂带一对开关管,以辅助中点钳位。后来,1980年日本学者A.Nabae在当年的IAS年会上对此进一步改进[11],将这些辅助开关变成一对二极管,分别与上下桥臂串联的主管中点相连,以辅助中点钳位,从而构成二极管中点钳位型(Neutral Point Clamped,NPC)三电平变换器。与前者相比,该电路更易于控制,且主管关断时仅承受直流母线一半的电压,因此更为实用。1983年,Bhagwat和Stefanovic进一步将这种电路结构由三电平推广到多电平,从而奠定了NPC结构的多电平模式[12],为高压大容量变换器提供了新思路。多电平变换器作为一种新型的高压大容量功率变换器,从电路拓扑结构入手,在得到高质量的输出波形的同时,克服了两电平变换器需要输出变压器和动态均压电路的诸多缺点,具有以下主要优点:①更适合高压大容量场合;②电平数越高,输出的电压谐波含量越低;③器件开关频率低,开关损耗小,效率得到提高;④器件应力小,无须动态均压。因此,自20世纪80年代以来被广泛应用于高压交流调速和大功率静止无功补偿等场合[13,14],目前已经成为电力电子的一个重要研究领域[15]。
多电平逆变器的思想提出至今,出现了许多电路拓扑,现在一般认为目前实际应用中比较有代表性的多电平变换器有三种主要拓扑结构:二极管中点钳位型、飞跨电容型和输出串联型。
1.二极管中点钳位型拓扑
图1-1a给出了中点钳位型多电平逆变器的拓扑结构图。这种结构的特点是采用多个二极管对相应开关元件进行钳位,输出相应M电平的相电压。二极管钳位型拓扑具有多电平逆变器共同的优点,但存在自身不足:①所需钳位二极管的数量随着电平数的增多而急剧增多,提高了成本,实际应用中通常不超过五个电平;②电平数增多时直流侧电容电压平衡难以控制,尤其在高功率因数负载和高调制比运行时,三电平有很多方法可以实现中点平衡[16,17],包括软件和硬件的方法,而三电平以上仅靠软件的方法通常比较困难[18,19],从而加重了直流母线侧电压的负担;③电平数超过三时,钳位二极管承受电压不均衡。针对这些问题,学者们做了很多工作[19,20],有的着力于解决电容电压的不平衡,有的着力于解决电平数多时二极管的均压问题,均取得了一定的效果。总体来讲,NPC结构在实际中以三电平最为实用。
2.飞跨电容型拓扑
飞跨电容型(Flying Capacitors)多电平逆变器的拓扑结构图如图1.1b所示,又称悬浮电容钳位型多电平逆变器,由T.A.Meynard和H.Foch在1992年PESC年会上提出[21]。最初目的是减少二极管钳位多电平变流器在较多电平情况下过多的钳位二极管。也就是采用悬浮电容器来代替钳位二极管工作,直流侧的电容不变。工作原理与二极管钳位型变流器相似,但在电压合成方面,开关状态的选择比二极管钳位型具有更大的灵活性。当然,这种拓扑结构也存在许多问题:①引入大量直流电容,不但带来了体积、成本等多方面问题,而且必须设计复杂的电容预充电电路;②控制方法相对复杂,同样存在电容电压不平衡问题。(www.daowen.com)
3.输出串联型拓扑
输出串联型主要是具有独立直流电压源的级联型逆变器(Cascaded Inverters)。通过叠加低压逆变器的输出获得高压输出,包括H桥串联型多电平电路和三相逆变桥串联型多电平电路[15,22]。图1.1c所示为级联型多电平逆变器拓扑图。这种方式的主要优点是:①输入侧功率因数高;②各个单元相对独立,容易采用冗余方式实现高可靠性;③控制非常简单,易于扩展输出;④电平数越高,相对于其他结构较简单。但是,由于每个单元均需要一个独立电源,系统结构复杂。通常采用三相交流通过不控整流得到直流电源,由于采用曲折变压器,增大了体积和成本,在实际应用中受到较大限制。另外,其制动困难,动态性能较差,限制了其应用范围,主要用于风机水泵等对动态性能要求不高的场合。目前国内高压大容量变频器的结构大都是基于这种拓扑。有学者[22]提出了不对称多电平方式,采用1∶2的直流电源,可以用较少的串联桥数输出较多的电平,而且还可以根据不同的电压等级选取不同的功率开关器件,进一步优化系统的性能和价格,但这种不对称多电平方式难以保持各单元H桥的功率平衡。
除上述典型多电平拓扑外,有学者提出了具有自平衡能力的多电平变流器拓扑[23],可以在理论上把二极管钳位型和电容悬浮型统一起来,但这种采用了较多开关和电容的拓扑用于大功率变频器存在许多问题。另外,还有学者提出了混合型多电平变换器结构,即NPC/H桥结构,与同样的NPC结构相比,相电压有五个电压等级而不是三个,减少了输出电压的dv/dt和THD。另外,由于没有器件的串联,消除了器件的动静态均压要求。这种逆变器的缺点是开关器件数量增加了一倍,需要三个独立的直流电源,增加了系统的复杂性和成本。
在所有多电平拓扑结构中,三电平NPC结构是提出最早也比较成熟的一种结构,其电路结构相对简单,所需的钳位二极管的数量较少、控制方法也容易实现,已广泛应用于中高压大容量电动机驱动领域[24]。本书在第7章中对三电平逆变器驱动的异步电动机高性能控制进行了详细介绍。
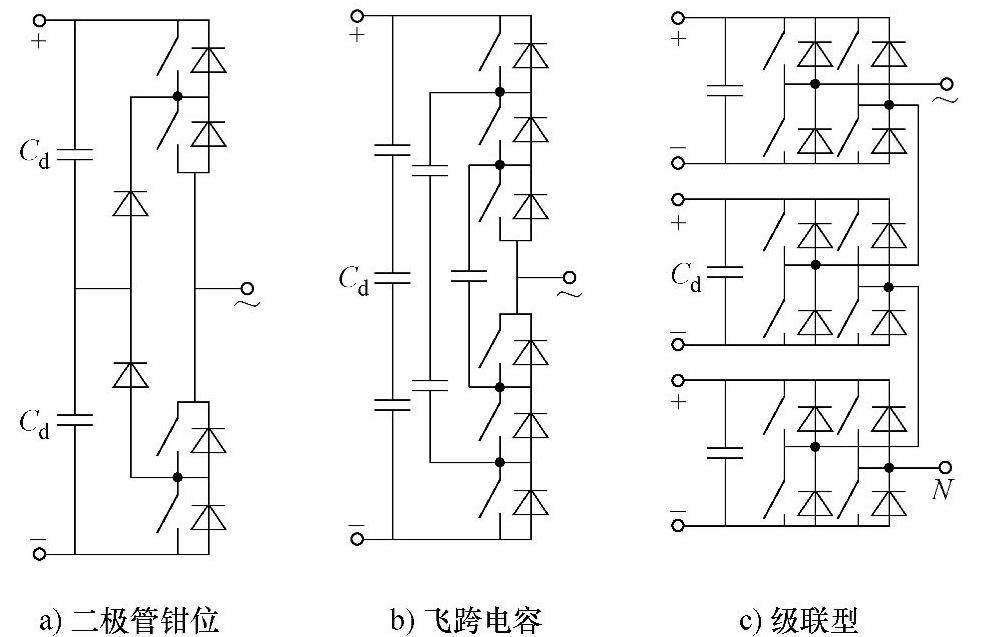
图1-1 典型多电平逆变器拓扑
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





