(1)控制要求 机械手自动操作完成将工件由A点移向B点的动作,其示意图如图8-5所示。机械手每个工作臂上都有上、下限位和左、右限位开关,而其夹持装置不带限位开关。一旦夹持开始,定时器起动,定时结束,夹持动作随即完成。机械手到达B点后,将工件松开的时间也是由定时器控制的,定时结束时,表示工件已松开。
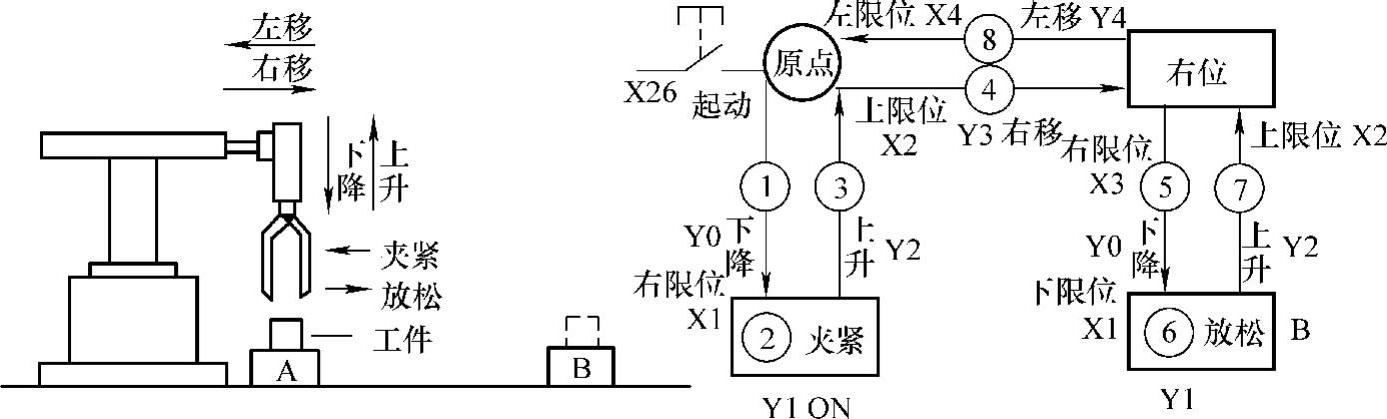
图8-5 机械手的动作要求示意图
(2)控制方案 本例采用FX2型PLC控制,有关输入、输出点在PLC内的分配,如图8-6所示,机械手的动作过程如下:
当按下起动按钮时,机械手从原点开始下降,下降到底时碰到下限位开关(X1接通),下降停止,同时接通定时器,机械手开始夹紧工件,定时结束夹紧完成。机械手上升,上升到顶时,碰到上限位开关(X2接通),上升停止。机械手右移,至碰到右限位开关(X3接通)时,右移停止。机械手下降,下降到底时,碰到下限位开关(X1接通),下降停止。同时接通定时器,机械手放松工件,定时结束,工件已松开。机械手上升,上升到顶碰到上限位开关(X2接通)时,上升停止。机械手左移,到原点碰到左限位开关(X4接通)时,左移停止。于是机械手动作的一个周期结束。机械手自动操作流程图如图8-7所示。
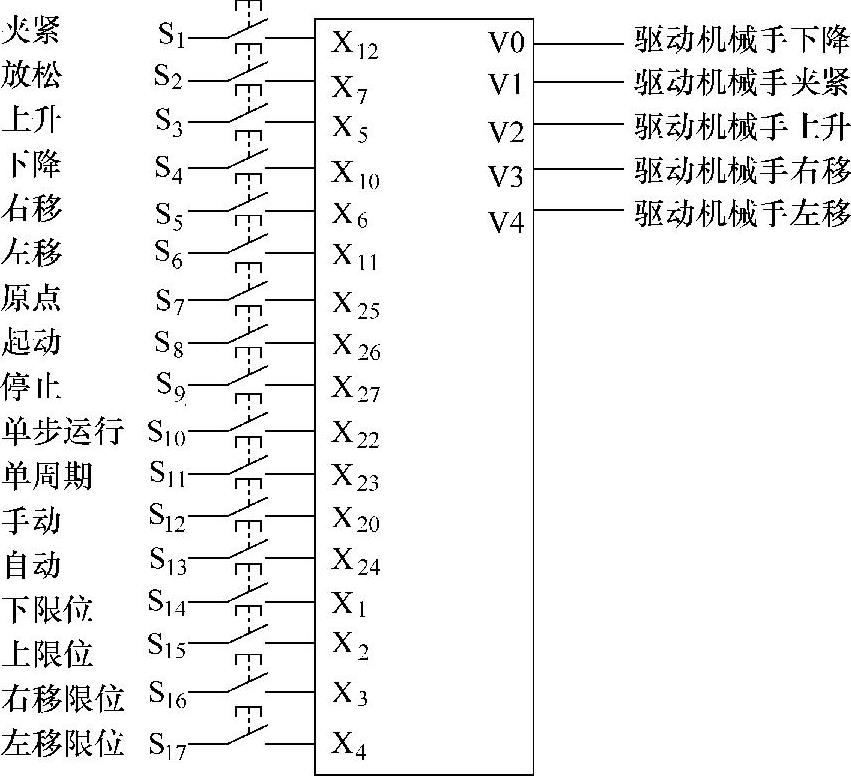
图8-6 机械手控制I/O分配图
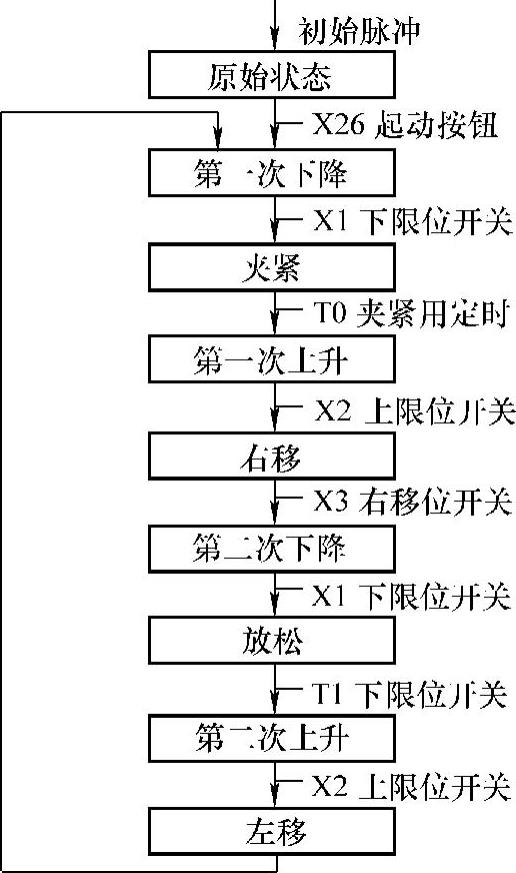
图8-7 自动控制流程图
状态转移图如图8-8所示。
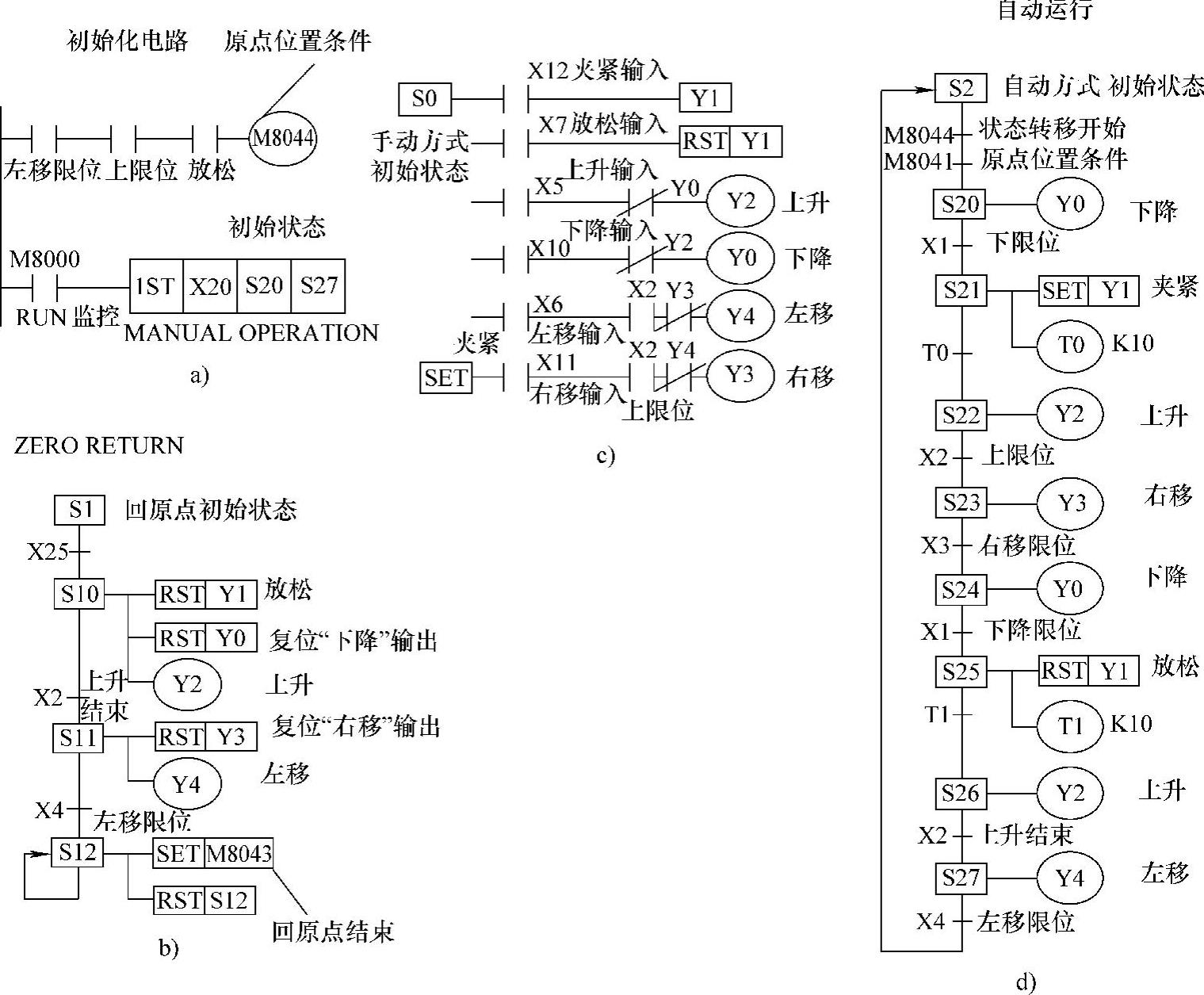
图8-8 状态转移图
a)初始化状态 b)回原点初始状态 c)手动方式状态 d)自动方式状态(www.daowen.com)
图8-9是机械手控制的操作面板示例。由图可见,此机械手可分为3种控制方式:手动控制方式、自动控制方式和半自动运行方式。根据控制面板所设,可将状态转移图分成4块:即自动方式状态、手动方式状态、回原点初始状态、初始化状态,如图8-9所示。
对状态转移图中几处特殊辅助继电器及特殊功能说明如下:
1)M8044(原点位置条件)。此元件在检测到原点时动作。它由原点的各传感器驱动,ON状态作为自动方式时的允许状态转移的条件。
2)M8041(状态转移开始)。它是一个状态转移标志元件。当它为ON状态时,表示自动方式时从初始状态开始转移。
3)M8043(回原点完成)。这是一个标志元件。当它为ON时,表示原点状态结束,回原点初始状态的状态元件S10~S19都将作回零操作。
4)M8000(RUN监控)。只要RUN按钮动,它就一直ON,用此信号来监控PLC的工作。
5)初始状态指令。此指令的功能号为FNC60。这条指令的内容较复杂。其中的S0表示手动初始状态,S2表示自动方式的起始状态,S27表示自动方式的最终状态。此条指令的动作结果直接影响了M8040、M8041、M8042、M8041的状态。这条指令等效于图8-10所示的电路。其中,M8042为输入起动时的起动脉冲。M8040为禁止转移辅助继电器。此辅助继电器接通后就禁止所有的状态转移,所以它的ON状态总是出现在手动状态中。M8047为状态元件监控有效标志辅助继电器。当M8047为ON时,状态S0~S899中正在动作的状态号从最低号开始顺序存入特殊数据寄存器D8040~D8047,最多可存8个状态号。机械手状态转移图对应程序如下:
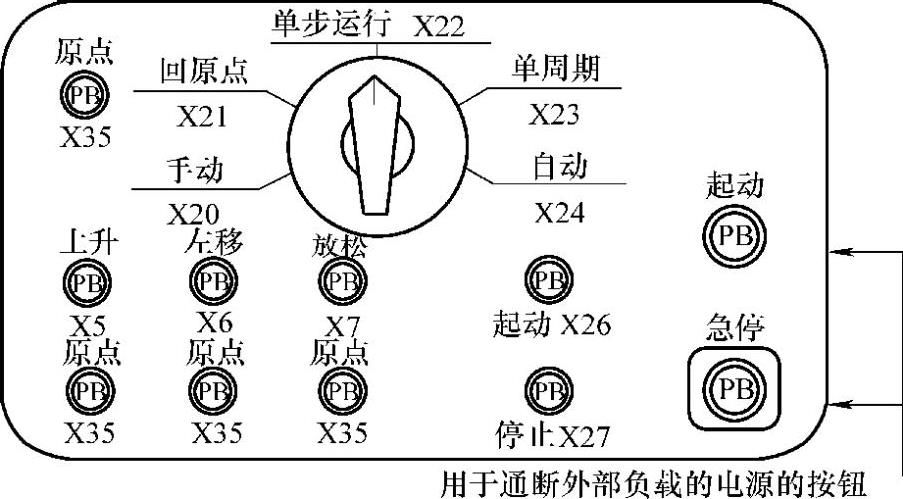
图8-9 机械手控制的操作面板
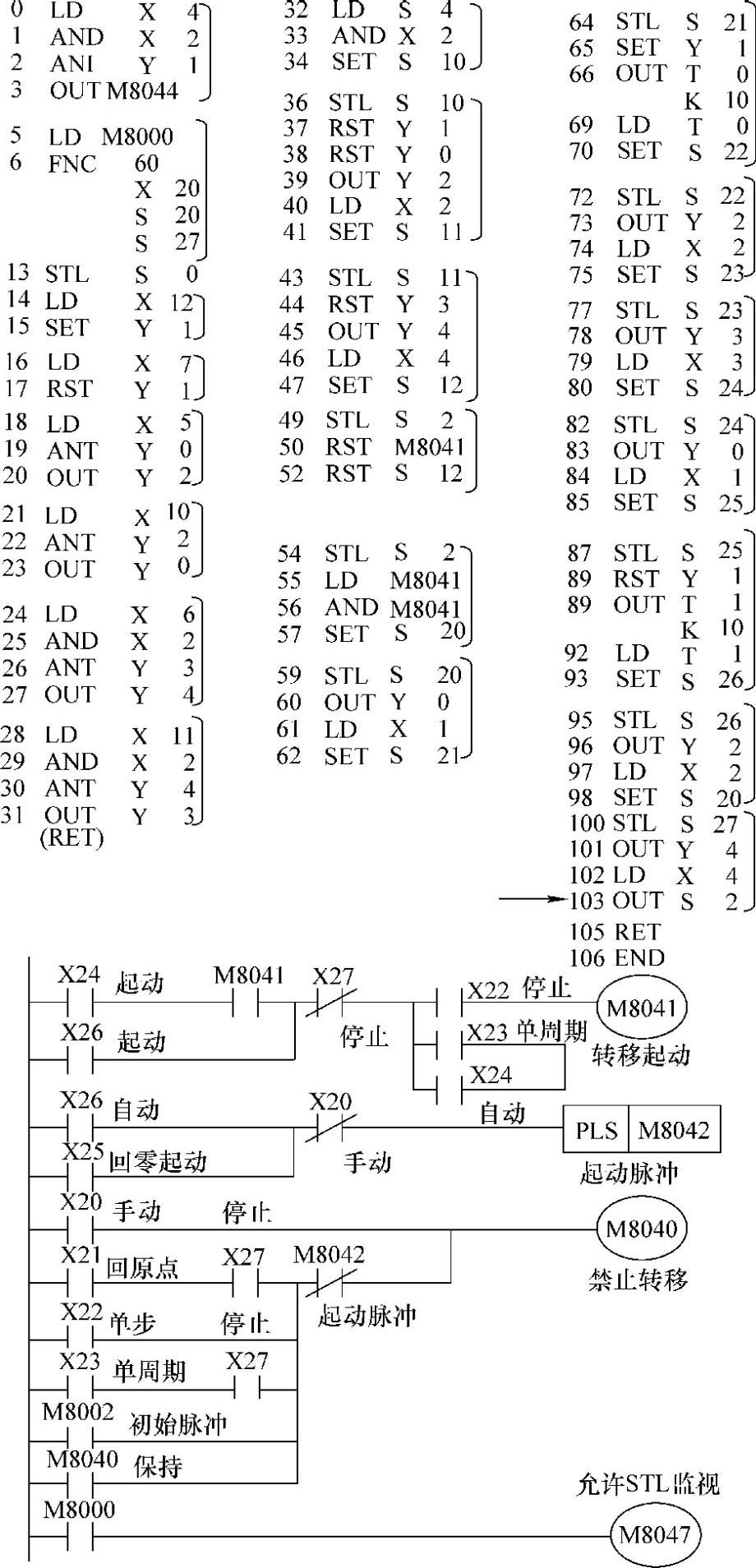
图8-10 初始状态指令等效电路
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






