1.总传动速比及其分配
(1)根据脉冲当量确定总传动速比 如图8-3a所示,已知:工件直径D上的周向脉冲当量δ=0.01mm/p,编码器的分辨率s=1000p/r,工件基准直径D=509.29mm。根据周向脉冲当量的定义,可知总传动速比i为

(2)传动速比的分配 由于整个θ轴系统在x轴系的工作台上,且有周向定位精度要求,因此,各级传动速比应按重量最轻和输出轴转角误差最小的原则来分配,故三级传动速比分别为

2.转速计算
已知:工件直径D的圆周速度v1=100~300mm/min,则工件转速n1为

电动机所需的转速nm=n1×i=(600~1800)r/min
3.等效负载转矩计算
已知:回转体(含工件及其夹具、主轴及No.3大齿轮等)的重力W=2000N。
1)主轴承的摩擦因数μ=0.02。
2)主轴承的摩擦力f=μW=40N。
3)主轴承直径D=100mm。
4)主轴承上产生的摩擦负载转矩 。
。
5)工件不平衡重力W1=100N。
6)工件重心偏置距离l=200mm。
7)不平衡负载转矩ML=W1l=2000N·cm=20N·m。
8)传动速比i=160或传动比 。
。
9)换算到电动机轴上的等效负载转矩MeL(含齿轮传动链的损失20%)为
MeL=(Mf+ML)×1.2×μ=0.165N·m
4.等效转动惯量计算
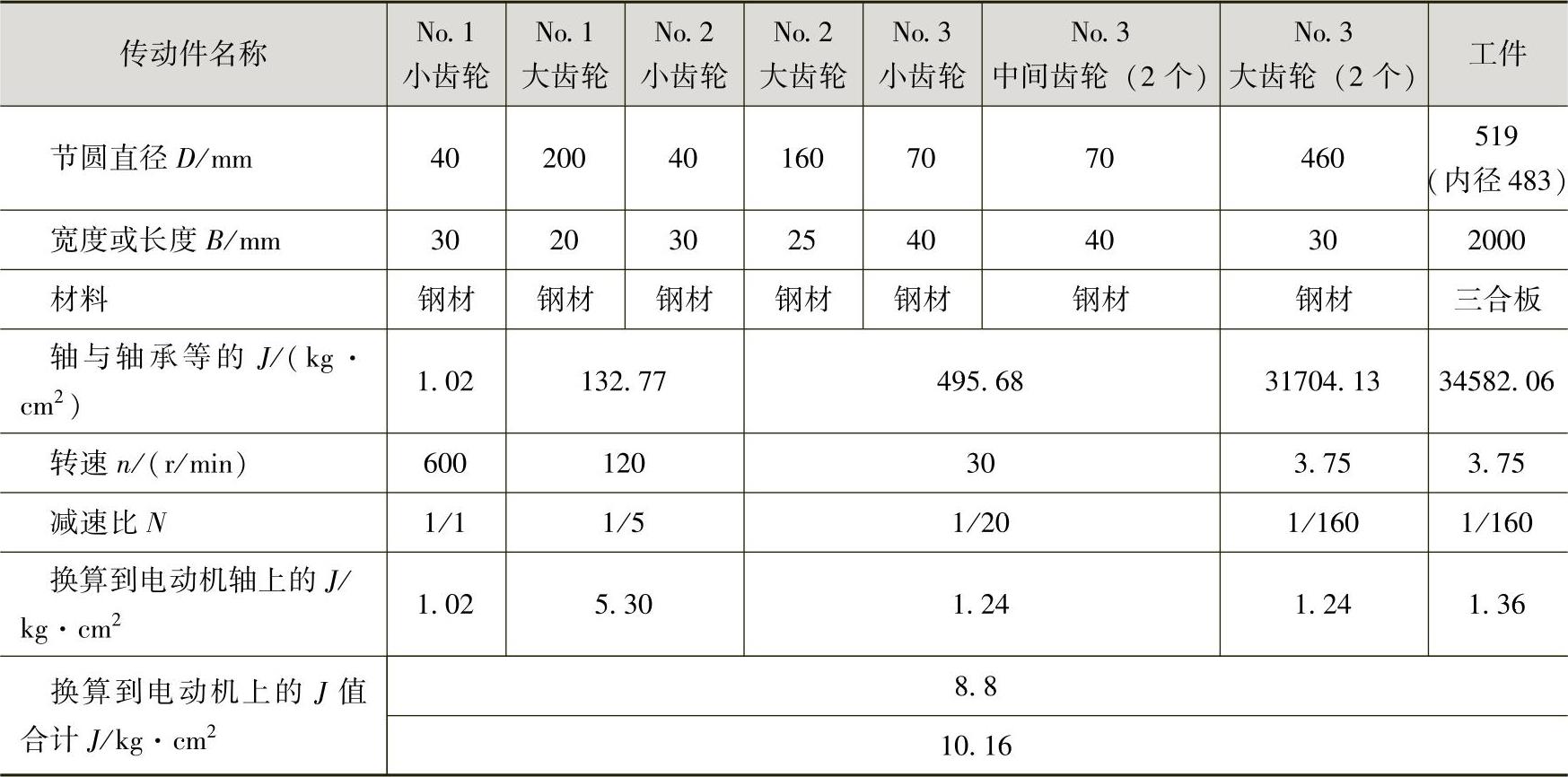
(1)传动系统J1 齿轮、轴类和工件的详细尺寸省略,各元件的J值见表8-1,从该表可知,换算到电动机轴上的J1=8.8kg·cm2。
(2)工件J2 外径D1=519mm,内径d=483mm,长度l=2000mm的半圆筒形三合板,其重力W=450N,换算到电动机轴的工件J2=1.36kg·cm2。
(3)等效转动惯量JeJe=J1+J2=10.16kg·cm2=0.1016×10-2kg·cm2。
表8-1 θ轴传动系统的J值(https://www.daowen.com)
5.初选伺服电动机
由于该伺服电动机长期连续工作在变负载之下,故先按方均根负载初选电动机,其工作循环如图8-3所示(已知t1=t2=0.5s)。

计算所需伺服电动机功率(已知传动系统η=0.95,nLr=nm=1800r/min)为

查有关手册,初选IFT50~2型交流伺服电动机,其额定转矩MN=0.75N·m,额定转速nN=2000r/min,转子惯量Jm=1.2×10-4kg·m2,显然J2/Jm>3,影响伺服电动机的灵敏度和响应时间。于是决定改选北京凯奇拖动控制系统有限公司生产的中惯量交流伺服电动机SM02,其功率为0.3kW,额定转矩MN=2N·m,最高转速nmax=2000r/min,Jm=4.2×10-4 kg·m2,Je/Jm=2.4<3。
6.计算电动机需要的转矩Mm
已知:加速时间t1=0.5s,电动机转速nm=600r/min,根据动力学公式,电动机所需的转矩Mm为

可见,当电动机的转速nm=1800r/min时,电动机所需的转矩Mm=0.835N·m,远小于SM02交流伺服电动机的额定转矩(MN=2N·m),伺服电动机是安全的。
7.伺服电动机发热校核
已知:M1=-M2=MM,参见图8-4,其方均根转矩MLr为

故有

这表明该电动机的转矩能满足要求。
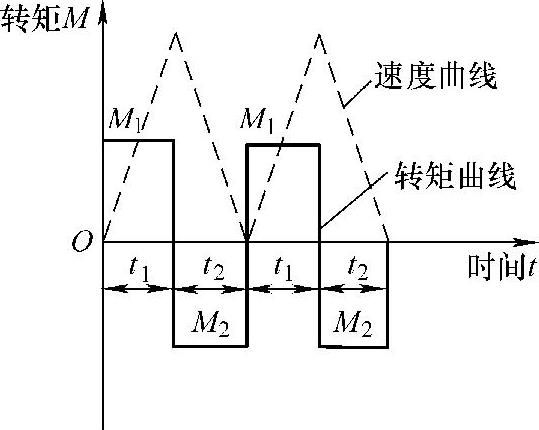
图8-4 激光加工机工作循环图
8.定位精度分析
θ轴伺服系统虽然是半闭环控制,但除了电动机以外,仍是开环系统。因此,其定位精度主要取决于θ轴的齿轮传动系统,与电动机本身的制造精度关系不大。
根据误差速比原理,仅要求末级齿轮的传动精度较高。当要求周向定位精度Δ=±0.1mm时,则相当于主轴上的转角误差Δθ为

由此可选择齿轮的传动精度。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




