1.控制要求
某运料小车自动往返运行的示意图如图6-43所示,其控制要求如下:
1)按起动按钮SB1,小车电动机正转,小车第一次前进;碰到限位开关SQ1后,电动机反转,小车后退。
2)小车后退碰到限位开关SQ2后,电动机M停转;停10s后,小车第二次前进,碰到限位开关SQ3,再次后退。
3)小车第二次后退碰到限位开关SQ2时停止。
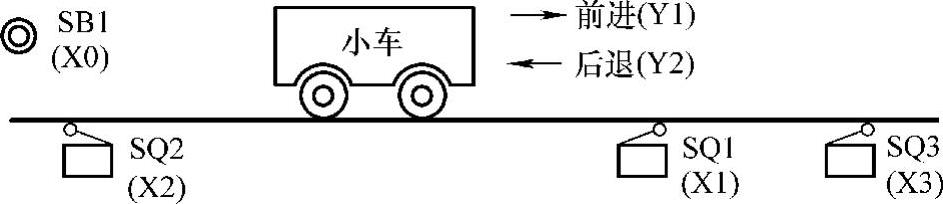
图6-43 某运料小车自动往返运行的示意图
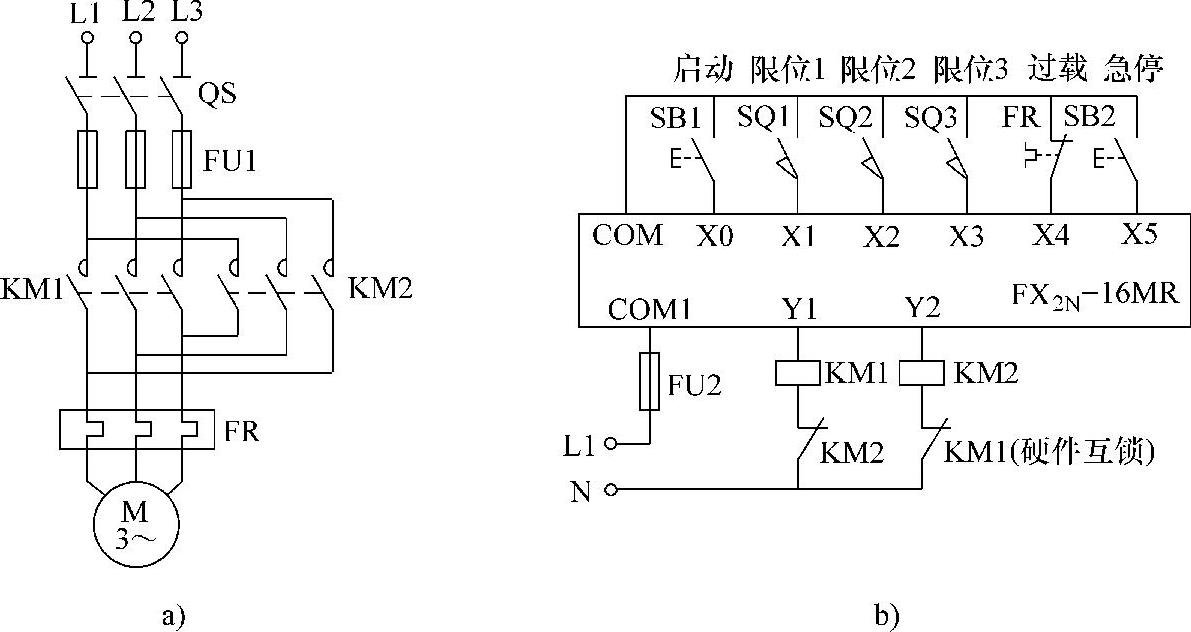
2.PLC选型及I///O信号分配
本案例主电路图如图6-44a所示,输入控制信号包括起/停控制信号(2个)、限位控制信号(3个)和过载保护控制信号(1个);输出控制信号有2个(电动机M的正转与反转),故选16点FX2N-16MR型PLC,其I/O信号分配如图6-44b所示。
 (https://www.daowen.com)
(https://www.daowen.com)
图6-44 搬运小车控制硬件系统
a)主电路图 b)PLC I/O信号分配图
3.程序设计
本案例要求小车按规定的工作过程运行,属于典型的顺序控制问题。对顺序控制问题,应按工艺过程进行编程。
用辅助继电器M对小车的工作过程加以描述,可表示为:一次前进(M1)→一次后退(M2)→停车延时(T10)→二次前进(M3)→二次后退(M4)→停车。对每一过程加上起/停条件,就构成了小车控制梯形图的基本环节,如图6-45所示。
需要注意的是,小车第一次前进与第二次前进过程中都将碰到限位开关SQ1,但第一次前进碰到SQ1后小车应返回,而第二次前进碰到SQ1后小车应继续前进;同样,小车第一次后退与第二次后退过程中都将碰到限位开关SQ2,但第一次后退碰到SQ2并延时10s后,小车应重新前进,而第二次后退碰到SQ2后应不起动延时环节而直接停车,为了区分这两个不同的工作过程,选用辅助继电器M10对第二次前进加以“记忆”,并用M10信号对计时环节加以限制,同时在第二次前进回路中不设SQ1的输入信号。
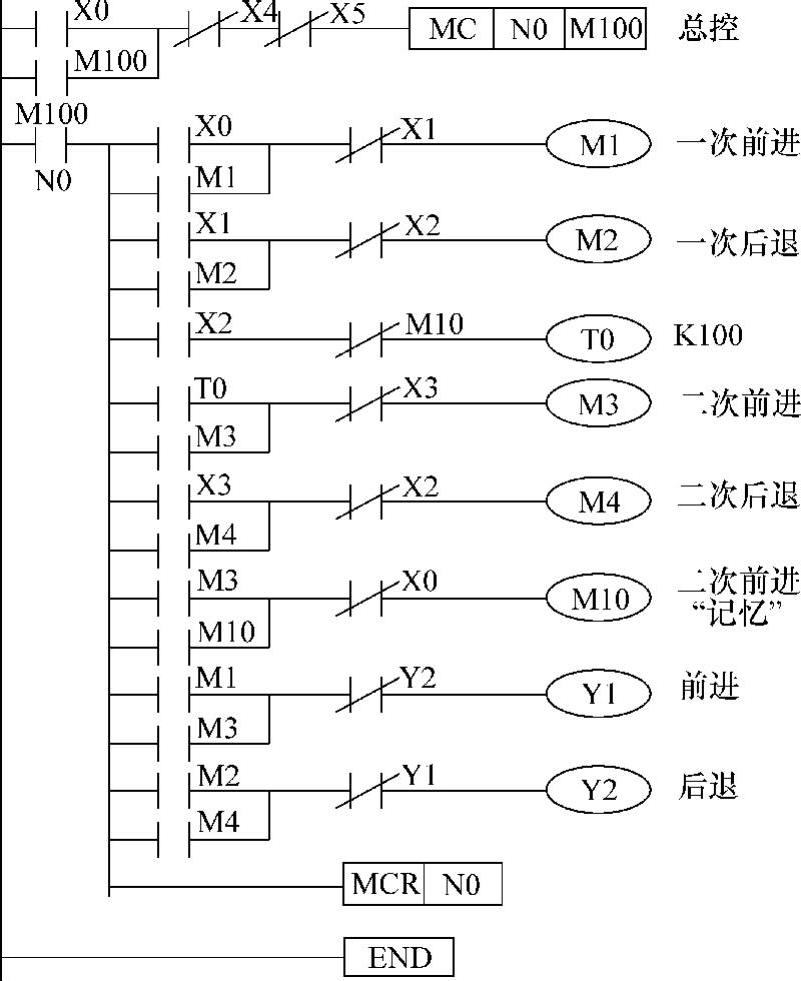
图6-45 小车控制梯形图
为了防止电动机正、反转接触器切换过程中的短接故障,除在程序中加了互锁环节(Y1与Y2的常闭触点)外,还在I/O接线上加了硬件互锁环节(KMl与KM2的常闭触点)。另外,在梯形图中用MC指令增加了总控环节,以便急停及过载保护的实现。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





