电感式传感器是基于电磁感应原理,将被测非电量转换为电感量变化的一种传感器。按其转换方式的不同,可分为自感式(包括可变磁阻式与涡流式)和互感式(如差动变压器式)两大类型。
1.自感式电感传感器
自感式可分为可变磁阻式和涡流式两类。
(1)可变磁阻式电感传感器 典型的可变磁阻式电感传感器的结构如图5-9所示,主要由线圈、铁心和活动衔铁所组成。在铁心和活动衔铁之间保持一定的空气隙δ,被测位移构件与活动衔铁相连,当被测构件产生位移时,活动衔铁随着移动,空气隙δ发生变化,引起磁阻变化,从而使线圈的电感值发生变化。当线圈通以励磁电流时,其自感L与磁路的总磁阻Rm有关,即

图5-9 可变磁阻式电感传感器
1—线圈 2—铁心 3—衔铁

式中 W——线圈匝数;
Rm——总磁阻。
如果空气隙δ较小,而且不考虑磁路的损失,则总磁阻为

式中 l——铁心导磁长度(m);
μ——铁心磁导率(H/m);
A——铁心导磁截面积(m2),A=ab;
δ——空气隙(m),δ=δ0±Δδ;
μ0——空气磁导率(H/m),μ0=2π×10-7;
A0——空气隙导磁截面积(m2)。
由于铁心的磁阻与空气隙的磁阻相比是很小的,计算时铁心的磁阻可忽略不计,故

将式(5-13)代入式(5-11),得
式(5-14)表明,自感L与空气隙δ的大小成反比,与空气隙导磁截面积A0成正比。当固定A0不变,改变δ时,L与δ呈非线性关系,此时传感器的灵敏度
 (https://www.daowen.com)
(https://www.daowen.com)
由式(5-15)得知,传感器的灵敏度与空气隙δ的二次方成反比,δ越小,灵敏度越高。由于S不是常数,故会出现非线性误差,同变极距型电容式传感器类似。为了减小非线性误差,通常规定传感器应在较小间隙的变化范围内工作。在实际应用中,可取Δδ/δ0≤0.1。这种传感器适用于较小位移的测量,一般为0.001~1mm。
图5-10为差动式磁阻传感器,它由两个相同的线圈、铁心及活动衔铁组成。当活动衔铁接近于中间位置(位移为零)时,两线圈的自感L相等,输出为零。当衔铁有位移Δδ时,两个线圈的间隙为δ0+Δδ、δ0-Δδ,这表明一个线圈自感增加,而另一个线圈自感减小,将两个线圈接入电桥的相邻臂时,其输出的灵敏度可提高一倍,并改善了线性特性,消除了外界干扰。
可变磁阻式传感器还可做成改变空气隙导磁截面积的形式,当固定δ,改变空气隙导磁截面积A0时,自感L与A0呈线性关系。
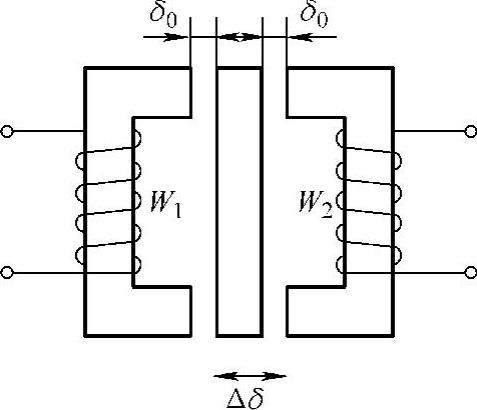
图5-10 差动式磁阻传感器
(2)涡流式传感器 涡流式传感器是利用金属导体在交流磁场中的涡电流效应。如图5-11所示,金属板置于一只线圈的附近,它们之间相互的间距为δ。当线圈输入交变电流i0时,便产生交变磁通量Φ。金属板在此交变磁场中会产生感应电流i,这种电流在金属体内是闭合的,所以称之为“涡流”。涡流的大小与金属板的电阻率ρ、磁导率μ、厚度h、金属板与线圈的距离δ、激励电流角频率ω等参数有关。若改变其中某一参数,而其他参数不变,就可根据涡流的变化测量该参数。涡流式传感器可分为高频反射式和低频透射式两种。
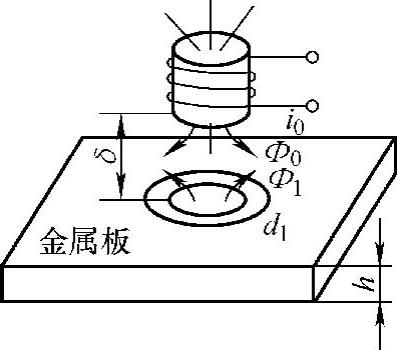
图5-11 高频反射式涡流传感器
1)高频反射式涡流传感器。如图5-11所示,高频(>1MHz)激励电流i0产生的高频磁场作用于金属板的表面,由于趋肤效应,在金属板表面将形成涡电流。与此同时,该涡流产生的交变磁场又反作用于线圈,引起线圈自感L或阻抗ZL的变化,其变化与距离δ、金属板的电阻率ρ、磁导率μ、激励电流i0及角频率ω等有关,若只改变距离δ而保持其他系数不变,则可将位移的变化转换为线圈自感的变化,通过测量电路转换为电压输出。高频反射式涡流传感器多用于位移测量。
2)低频透射式涡流传感器。低频透射式涡流传感器的工作原理如图5-12所示,发射线圈W1和接收线圈W2分别置于被测金属板材料G的上、下方。由于低频磁场趋肤效应小,渗透深,当低频(音频范围)电压u1加到线圈W1的两端后,所产生磁力线的一部分透过金属板材料G,使线圈W2产生感应电动势u2。但由于涡流消耗部分磁场能量,使感应电动势u2减少,当金属板材料G越厚时,损耗的能量越大,输出电动势u2越小。因此,u2的大小与G的厚度及材料的性质有关。试验表明,u2随材料厚度h的增加按负指数规律减少。因此,若金属板材料的性质一定,则利用u2的变化即可测量其厚度。

图5-12 低频透射式涡流传感器
2.互感式差动变压器电感传感器
互感式差动变压器电感传感器是利用互感量M的变化来反映被测量的变化。这种传感器实质是一个输出电压的变压器。当变压器一次绕组输入稳定交流电压后,二次绕组便产生感应电压输出,该电压随被测量的变化而变化。
差动变压器电感传感器是常用的互感型传感器,其结构形式有多种,以螺管形应用较为普遍,其结构及工作原理如图5-13a、b所示。传感器主要由绕组、铁心和活动衔铁三部分组成。绕组包括一个一次绕组和两个反接的二次绕组,当一次绕组输入交流激励电压时,二次绕组将产生感应电动势e1和e2。由于两个二次绕组极性反接,因此传感器的输出电压为两者之差,即ey=e1-e2。活动衔铁能改变绕组之间的耦合程度。输出ey的大小随活动衔铁的位置而变。当活动衔铁的位置居中时,即e1=e2,ey=0;当活动衔铁向上移时,即e1>e2,ey>0;当活动衔铁向下移时,即e1<e2,ey<0。活动衔铁的位置往复变化,其输出电压ey也随之变化。

图5-13 互感型差动变压器电感传感器
差动变压器传感器输出的电压是交流电压,如用交流电压表指示,则输出值只能反映铁心位移的大小,而不能反映移动的极性;交流电压输出存在一定的零点残余电压,零点残余电压是由于两个二次绕组的结构不对称、铁磁材质不均匀、绕组间分布电容等原因所形成。所以,即使活动衔铁位于中间位置时,输出也不为零。鉴于这些原因,差动变压器的后接电路应采用既能反映铁心位移极性,又能补偿零点残余电压的差动直流输出电路。
差动变压器传感器具有精度高达0.1μm量级、绕组变化范围大(可扩大到±100mm,视结构而定)、结构简单、稳定性好等优点,被广泛应用于直线位移及其他压力、振动等参量的测量。图5-14是电感测微仪所用的互感式差动位移传感器的结构图。

图5-14 差动式位移传感器的结构图
1—引线 2—固定瓷筒 3—衔铁 4—绕组 5—测力弹簧 6—防转销 7—钢球导轨 8—测杆 9—密封套 10—测端
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





