1.液压伺服控制系统的组成
图4-51所示为应用电液伺服阀的电液位置伺服系统,由指令电位器1、反馈电位器2、放大器3、电液伺服阀4、液压缸5和工作台6组成。
指令电位器将滑臂的位置指令xg转换成电压ug,被控制的工作台位置xf由反馈电位器检测,并转换成电压uf,两个相同的线性电位器接成桥式电路,该电桥输出电压Δu=ug-uf。当工作台位置xf与指令位置xg一致时,电桥输出偏差电压Δu=0,此时放大器输出电压为零;电液伺服阀处于零位,没有流量输出,工作台不移动,系统处在一个平衡状态。当指令电位器滑臂位置发生变化,如向右移动某一位移xg,而工作台位置还没有发生变化时,即xf=0、uf=0,则电桥输出的偏差电压Δu=ug-uf=ug,经放大器放大后变为电流信号去控制电液伺服阀,电液伺服阀输出压力油,推动工作台右移。工作台位移xf由反馈电位器检测,转换为电压uf,使电桥输出的偏差电压逐渐减小,当工作台位移xf等于指令电器滑臂位移xg时,电桥输出偏差电压Δu=0,工作台停止运动,系统处在一个新的平衡状态。如果指令电位器滑臂反向运动,则工作台也作反向运动。在这种系统中,工作台位置能准确地跟随指令电位器滑臂的变化规律,实现电液位置伺服控制。

图4-51 应用电液伺服阀的电液位置伺服系统
任何液压伺服系统,无论多复杂,都是由一些基本元件组成的,并可用图4-52表示。
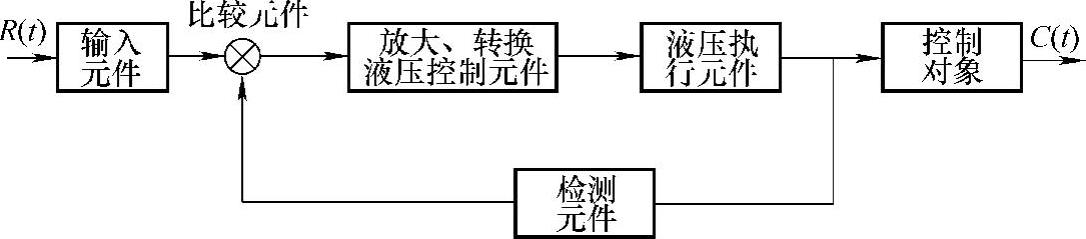
图4-52 液压伺服控制系统的基本元件
(1)指令(输入)元件 给出与反馈信号具有同样形式和量纲的控制信号,如前例中的指令电位器以及其他电器或计算机。
(2)反馈检测元件 检测被控制量,给出系统的反馈信号,如前例中的反馈电位器、测速机以及其他类型传感器。
(3)放大、转换、控制元件 把偏差信号加以放大,作能量形式转换(电-液、机-液、气-液等),变成液压信号(流量、压力)并控制执行元件运动,如前例中的放大器、伺服阀等。(https://www.daowen.com)
(4)比较元件 把控制信号和反馈信号加以比较,给出偏差信号。比较元件有时不单独存在,而是与输入元件、反馈检测元件及放大器在一起,由一个结构元件来完成。
(5)执行元件 直接对控制对象起控制作用的元件,如液压缸和液压马达等。
(6)控制对象 它是系统中所控制的对象,如工作台及其他负载装置。
此外,还可能有各种校正装置以及不包含在控制回路内的能源装置和其他辅助装置等。
2.液压伺服控制系统
液压伺服控制系统,可按下列不同原则进行分类:
(1)按误差信号产生和传递方式不同分 机械-液压伺服系统、电气-液压伺服系统及气动-液压伺服系统。
(2)按液压控制元件不同分 阀控系统,由伺服阀利用截流原理,控制输入执行元件的流量或压力的系统;泵控系统,利用伺服变量泵改变排量的办法,控制输入执行元件的流量或压力的系统。
(3)按被控制物理量不同分 位置伺服系统、速度伺服系统、力(或压力)伺服系统及其他伺服系统。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






