1.液压伺服系统原理
液压伺服系统(液压控制系统或液压随动系统)是一种自动控制系统,在这种控制系统中,液压执行元件的运动,也就是系统的输出量(机构位移、速度、加速度或力),能自动、快速而准确地复现输入量的变化规律。与此同时,还起到信号的功率放大作用,因此液压伺服机构也是功率放大装置。凡是采用液压伺服元件和液压执行元件,根据液压传动原理建立起来的伺服系统,都称为液压伺服控制系统。
图4-49所示为一简单液压传动系统,由一个滑阀控制的液压缸,推动负载运动。当给阀芯输入量xi(例如向右),则滑阀移动某一开口量xv,此时,压力油进入液压缸右腔,液压缸左腔回油,推动缸体向右运动,即有一输出位移xp,这一输出位移xp和输入位移xi大小无直接关系,而与液压缸结构尺寸有关。
若将上述滑阀和液压缸组合成一个整体,构成反馈通路,上述系统就变成一简单液压伺服系统,如图4-50所示。
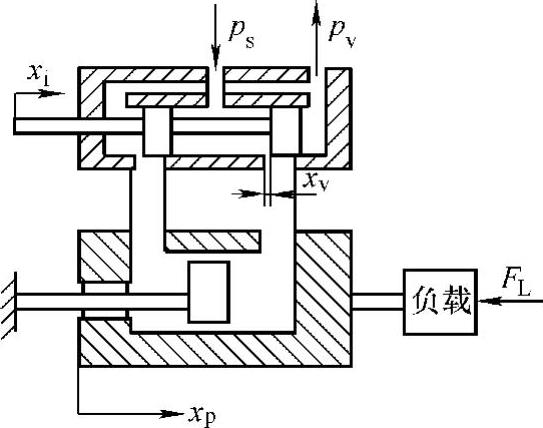
图4-49 液压传动系统
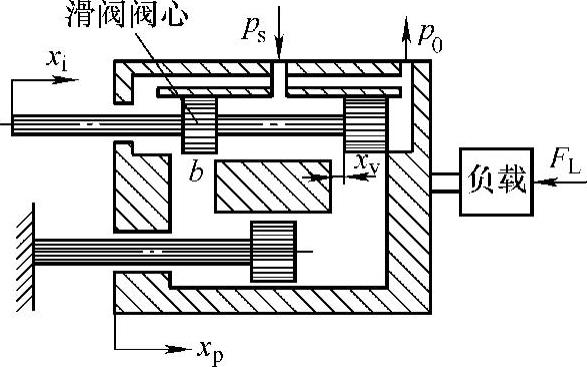
图4-50 液压伺服系统
如果控制滑阀处于中间位置(零位),即没有信号输入,xi=0。这时阀芯凸肩恰好堵住液压缸两个油口,缸体不动,系统的输出量xp=0,负载停止不动,系统处于静止平衡状态。
若给控制滑阀输入一个正位移xp>0(例如向右为正)的输入信号,阀芯偏离其中间位置,液压缸进出油路同时打开,凸肩和油口形成截流窗口,阀相应开口量xv=xi,高压油通过一个截流窗口进入液压缸右腔,而液压缸左腔的油通过另一个截流窗口回油,液压缸产生位移xp,此时,系统处于不平衡状态。(https://www.daowen.com)
由于控制滑阀阀体和液压缸缸体固连在一起,成为一个整体,随着输出量xp的增加,而滑阀开口量xv逐渐减少。当xp增加到xp=xi时,则开口量xv=0,油路关闭,液压缸不动,负载停止在一个新的位置上,达到一个新的平衡状态。如果继续给控制滑阀向右的输入信号xi,液压缸就会跟随这个信号继续向右运动。反之,若给控制滑阀输入一个负位移xi<0(向左为负)的输入信号,则液压缸就会跟随这个信号向左运动。
由此看出,在此系统中,滑阀不动,液压缸也不动;滑阀移动多少距离,液压缸也移动多少距离;滑阀移动速度快,液压缸移动速度也快;滑阀向哪个方向移动,液压缸也向哪个方向移动。只要给控制滑阀以某一规律的输入信号,则执行元件(系统输出)就自动地、准确地跟随控制滑阀按照这个规律运动,这就是液压伺服系统的工作原理。
2.液压伺服系统的基本特点
通过上述分析,可以看出液压伺服系统具有下列基本特点:
1)输出量能够自动地跟随输入量变化规律而变化,所以,液压伺服系统也可称为随动系统。
2)液压缸位移xp和阀芯位移xi之间不存在偏差时,即当控制滑阀处于零位时,系统的控制对象处于静止状态。由此可见,欲使系统有输出信号,首先必须保证控制滑阀具有一个开口量,即xv=xi-xp≠0。系统的输出信号和输入信号之间存在偏差是液压伺服系统工作的必要条件,也可以说液压伺服系统是靠偏差信号进行工作的。所以,液压伺服系统是一个有差系统。
3)输出信号之所以能精确地复现输入信号的变化,是因为控制阀体和液压缸固连在一起,构成了一个反馈控制通路。液压缸输出位移xp通过这个反馈通路回输给控制阀体,与输入位移xi相比较,从而逐渐减小和消除输出信号和输入信号之间的偏差,即滑阀的开口量,直至输出位移和输入位移相同为止。所以,液压伺服系统是一个反馈系统,这里的反馈是负反馈。
4)移动滑阀所需信号功率是很小的,而系统的输出功率(液压缸输出的速度和力)却可以很大,所以,液压伺服系统是一个功率(或力)放大系统。
综上所述,液压伺服控制的基本原理就是液压流体的反馈控制,即利用反馈连接得到偏差信号,再利用偏差信号去控制液压能源输入到系统的能量,使系统向减小偏差的方向变化,从而使系统输出信号复现输入信号的变化规律。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






