直线步进电动机在不需要闭环控制的条件下,能够提供一定精度、可靠的位置和速度控制。这是直流电动机和感应电动机不能做到的。因此,直线步进电动机具有直接驱动、容易控制、定位精确等优点。直线步进电动机主要可分为反应式和永磁式两种。
图4-36所示为永磁直线步进电动机的工作原理。其中定子用铁磁材料制成如图所示那样的“定尺”,其上开有矩形齿槽,槽中填满非磁材料(如环氧树脂)使整个定子表面非常光滑。动子上装有两块永久磁钢A和B,每一磁极端部装有用铁磁材料制成的П形极片。每块极片有两个齿(如a和c),齿距为1.5t,这样当齿a与定子齿对齐时,齿c便对准槽。同一磁钢的两个极片间隔的距离刚好使齿a和a′能同时对准定子的齿,即它们的间隔是加kt,k代表任一整数,k=1、2、3、4……
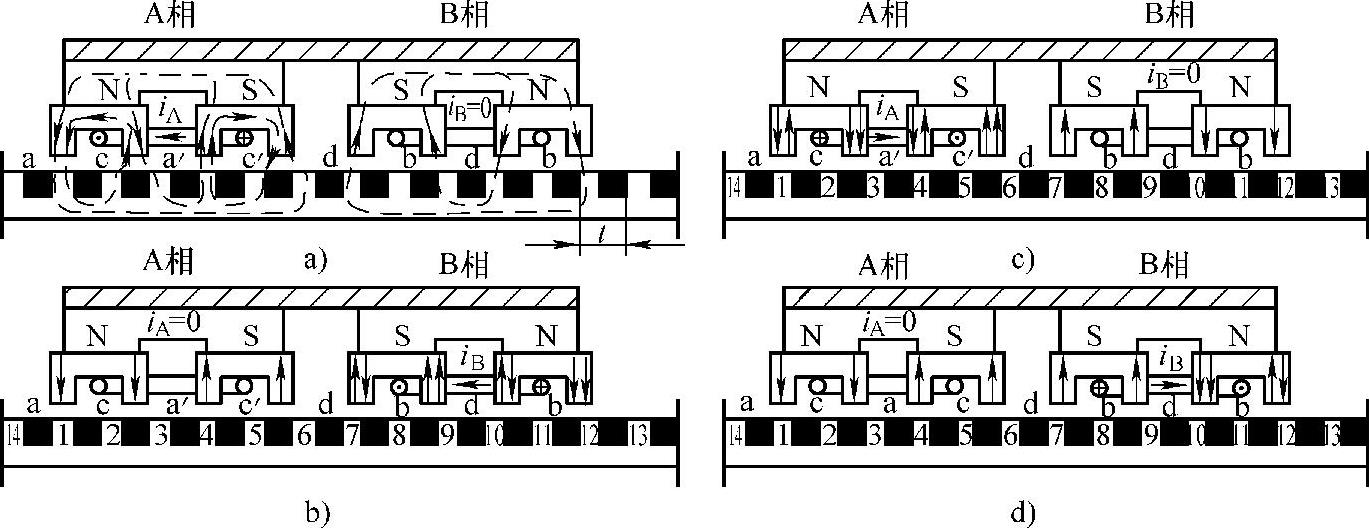
图4-36 永磁直线步进电动机工作原理
磁钢B与A相同,但极性相反,它们之间的距离应等于(k±1/4)t。这样,当其中一个磁钢的齿完全与定子齿和槽对齐时,另一磁钢的齿应处在定子的齿和槽的中间。在磁钢A的两个П形极片上装有A相控制绕组,磁钢B上装有B相控制绕组。如果某一瞬间,A相绕组中通入直流电流iA,并假定箭头指向左边的电流为正方向(图4-36a),这时,A相绕组所产生的磁通在齿a、a′中与永久磁钢的磁通相叠加,而在齿c、c′中却相抵消,使齿c、c′全部去磁,不起任何作用。在这过程中,B相绕组不通电流,即iB=0,磁钢B的磁通量在齿d、d′、b和b′中大致相等,沿着动子移动方向各齿产生的作用力互相平衡。
概括说来,这时只有齿a和a′在起作用,它使动子处在图4-36a所示的位置上。为了使动子向右移动,就是说从图4-36a所示位置移到4-36b所示的位置,就要切断加在A相绕组的电源,使iA=0,同时给B相绕组通入正向电流iB。这时,在齿b和b′中,B相绕组产生的磁通与磁钢的磁通相叠加,而在齿d、d′中却相抵消。因而,动子便向右移动半个齿宽即t/4,使齿b和b′移到与定子齿相对齐的位置。如果切断电流iB,并给A相绕组通上反向电流,则A相绕组及磁钢上产生的磁通在齿c、c′中相叠加,而在齿d、d′中相抵消。动子便向右又移动t/4,使齿c、c′,与定子齿相对齐,如图4-36c所示。
同理,如切断电流iA,给B相绕组通上反向电流,动子又向右移动t/4,使齿d和d′与定子齿相对齐,如图4-36d所示。这样,经过图4-36a、b、c、d所示的4个阶段后,动子便向右移动了一个齿距t。如果还要继续移动,只需要重复前面次序通电。
相反,如果想使动子向左移动,只要把4个阶段倒过来,即图4-36d、c、b、a。为了减小步距,削弱振动和噪声,这种电动机可采用细分电路驱动,使电动机实现微步距移动(10μm以下)。还可用两相交流电控制,这时需在A相和B相绕组中同时加入交流电。如果A相绕组中加正弦电流,则在B相绕组中加余弦电流。当绕组中电流变化一个周期时,动子就移动一个齿距;如果要改变移动方向,可通过改变绕组中的电流极性来实现。采用正、余弦交流电控制的直线步进电动机,因为磁拉力是逐渐变化的(这相当于采用细分无限多的电路驱动),可使电动机的自由振荡减弱。(https://www.daowen.com)
上面介绍的是直线步进电动机的工作原理。如果要求动子作平面运动,这时应将定子改为一块平板。其上开有x、y轴方向的齿槽,定子齿排成方格形,槽中注入环氧树脂,而动子是由两台上述那样的直线步进电动机组合起来制成的,如图4-37所示。其中一台保证动子沿着x轴方向移动,与它正交的另一台保证动子沿着y轴方向移动。这样,只要设计适当的程序控制语言,借以产生一定的脉冲信号,就可以使动子在xy平面上作任意几何轨迹的运动,并定位在平面上任何一点,这就成为平面步进电动机了。
反应式直线步进电动机的工作原理与旋转式步进电动机相同。图4-38所示为一台四相反应式直线步进电动机,它的定子和动子都由硅钢片叠成,定子上、下两表面都开有均匀分布的齿槽;动子是一对具有4个极的铁心,极上套有四相控制绕组,每个极的表面也开有齿槽,齿距与定子上的齿距相同。当某相动子齿与定子齿对齐时,相邻的动子齿轴线与定子齿轴线错开1/4齿距。上、下两个动子铁心用支架刚性连接起来,可以一起沿定子表面滑动。为了减小运动时的摩擦,在导轨上装有滚珠轴承,槽中用非磁性塑料填平,使定子和动子表面平滑。显然,当控制绕组按A—B—C—D—A的顺序轮流通电时(图中表示A相通电时动子所处的稳定平衡位置),根据步进电动机一般原理,动子将以1/4齿距的步距向左移动,当通电顺序改为A—D—C—B—A的顺序通电时,动子则向右移动。与旋转式步进电动机相似,通电方式可以是单拍制,也可以是双拍制,双拍制时步距减少一半。
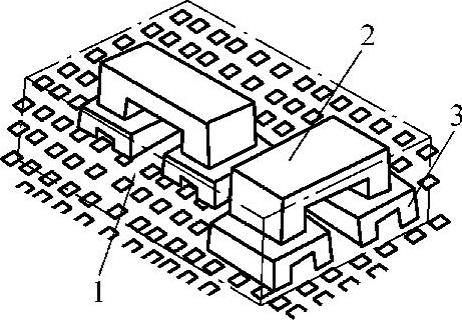
图4-37 平面步进电动机
1—平台 2—磁钢 3—磁极
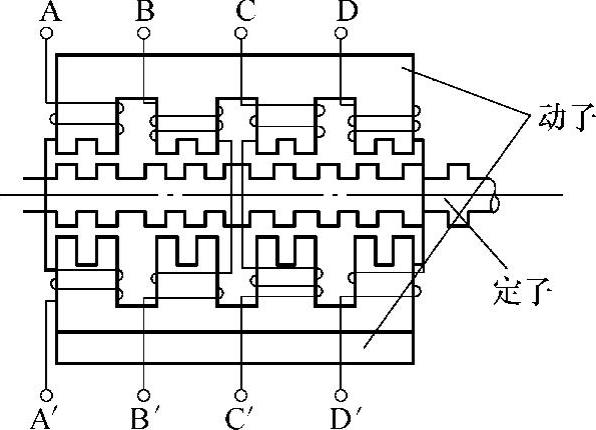
图4-38 四相反应式直线步进电动机
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。



