当计算出传动比之后,为了使减速系统结构紧凑、满足动态性能和提高传动精度,需要对各级传动比进行合理分配,其分配原则如下。
(1)重量最轻原则 对于小功率传动系统,使各级传动比 ,即可使传动装置的重量最轻。这个结论是在假定各主动小齿轮模数、齿数均相同的条件下导出的,故所有大齿轮的齿数、模数、每级齿轮副的中心距离也相同。结论对于大功率传动系统是不适用的,因其传递转矩大,故要考虑齿轮模数、齿宽等参数要逐级增加的情况,此时应根据经验、类比方法以及结构要求进行综合考虑,各级传动比一般应以“先大后小”原则处理。
,即可使传动装置的重量最轻。这个结论是在假定各主动小齿轮模数、齿数均相同的条件下导出的,故所有大齿轮的齿数、模数、每级齿轮副的中心距离也相同。结论对于大功率传动系统是不适用的,因其传递转矩大,故要考虑齿轮模数、齿宽等参数要逐级增加的情况,此时应根据经验、类比方法以及结构要求进行综合考虑,各级传动比一般应以“先大后小”原则处理。
(2)输出轴转角误差最小原则 为了提高齿轮传动系统传递运动精度,各级传动比应按先小后大原则分配,以便降低齿轮的加工误差、安装误差以及回转误差对输出转角精度的影响。设齿轮传动系统中各级齿轮的转角误差换算到末级输出轴上的总转角误差为ΔΦmax,则

式中 ΔΦk——为第k个齿轮所具有的转角误差;
i(kn)——为第k个齿轮的转轴至n级输出轴的传动比。
则四级齿轮传动系统各齿轮的转角误差(ΔΦ1、ΔΦ2、…、ΔΦ8)换算到末级输出轴上的总转角误差为

由此可知总转角误差主要取决于最末一级齿轮的转角误差和传动比的大小。在设计中最末两级的传动比应取大一些,并尽量提高最末一级齿轮副的加工精度。
(3)等效转动惯量最小原则 利用该原则所设计的齿轮 传动系统,换算到电动机轴上的等效转动惯量为最小。
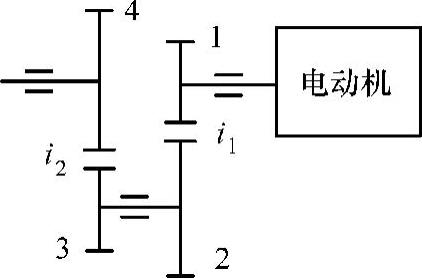
图3-5 二级齿轮减速传动
设有一小功率电动机驱动的二级齿轮减速系统,如图3-5所示。设其总体传动比为i=i1i2,假设各主动小齿轮具有相同的转动惯量,各齿轮均近似看成实心圆柱体,分度圆直径d、齿宽B、比重γ均相同,其转动惯量为J,如不计轴和轴承的转动惯量,则等效到电动机轴上的等效转动惯量为

因为
所以(https://www.daowen.com)

代入式(3-6)可得

令 ,则
,则
i61-i21-2i2=0 或 i41-1-2i22=0
由此可得 ,当i41≫1时,则可简化为
,当i41≫1时,则可简化为 ,故
,故

同理,可得n级齿轮传动系统各级传动比通式如下

在计算中不必精确到几位小数,因在系统机构设计时还要作适当调整。按此原则计算的各级传动比按“先小后大”次序分配,可使其结构紧凑。该分配原则中的假设对大功率齿轮传动系统不适用。虽然其计算公式不能通用,其分配次序应遵循“由大到小”的分配原则。
综上所述,在设计中应根据上述原则并结合实际情况的可行性和经济性对转动惯量、结构尺寸和传动精度提出适当要求。具体来讲有以下几点:
1)对于要求体积小、重量轻的齿轮传动系统可用重量最轻原则。
2)对于要求运动平稳、起停频繁和动态性能好的伺服系统的减速齿轮系统,可按最小等效转动惯量和总转角误差最小的原则来处理。对于变负载传动齿轮系统的各级传动比最好采用不可约的比数,避免同期啮合以降低噪声和振动。
3)对于提高传动精度和减小回程误差为主的传动齿轮系,可按总转角误差最小原则。对于增速传动,由于增速时容易破坏传动齿轮系统工作的平稳性,应在开始几级就增速,并且要求每级增速比最好大于1∶3,以有利于增加轮系刚度、减小传动误差。
4)对较大传动比传动的齿轮系统,往往需要将定轴轮系和行星轮系巧妙结合为混合轮系。对于传动比要求很大、传动精度与效率要求高的齿轮传动,可选用谐波齿轮传动。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







