【摘要】:机械传动和支承机构的类型、方式、刚性以及可靠性对机电一体化系统的精度、稳定性和快速响应性有着直接影响。因此,在机电一体化系统设计过程中应选择传动间隙小、精度高、体积小、重量轻、运动平稳、传递转矩大的机械传动和支承机构。因此,机械传动机构应能适应高速运动的要求。
机电一体化系统常用的机械传动和支承机构主要包括齿轮传动、带传动、螺旋传动、间隙传动、轴、轴承、导轨、机座等,其主要功能是传递转矩、转速和支承,实质上它们是转矩、转速变换装置。
机械传动和支承机构的类型、方式、刚性以及可靠性对机电一体化系统的精度、稳定性和快速响应性有着直接影响。因此,在机电一体化系统设计过程中应选择传动间隙小、精度高、体积小、重量轻、运动平稳、传递转矩大的机械传动和支承机构。
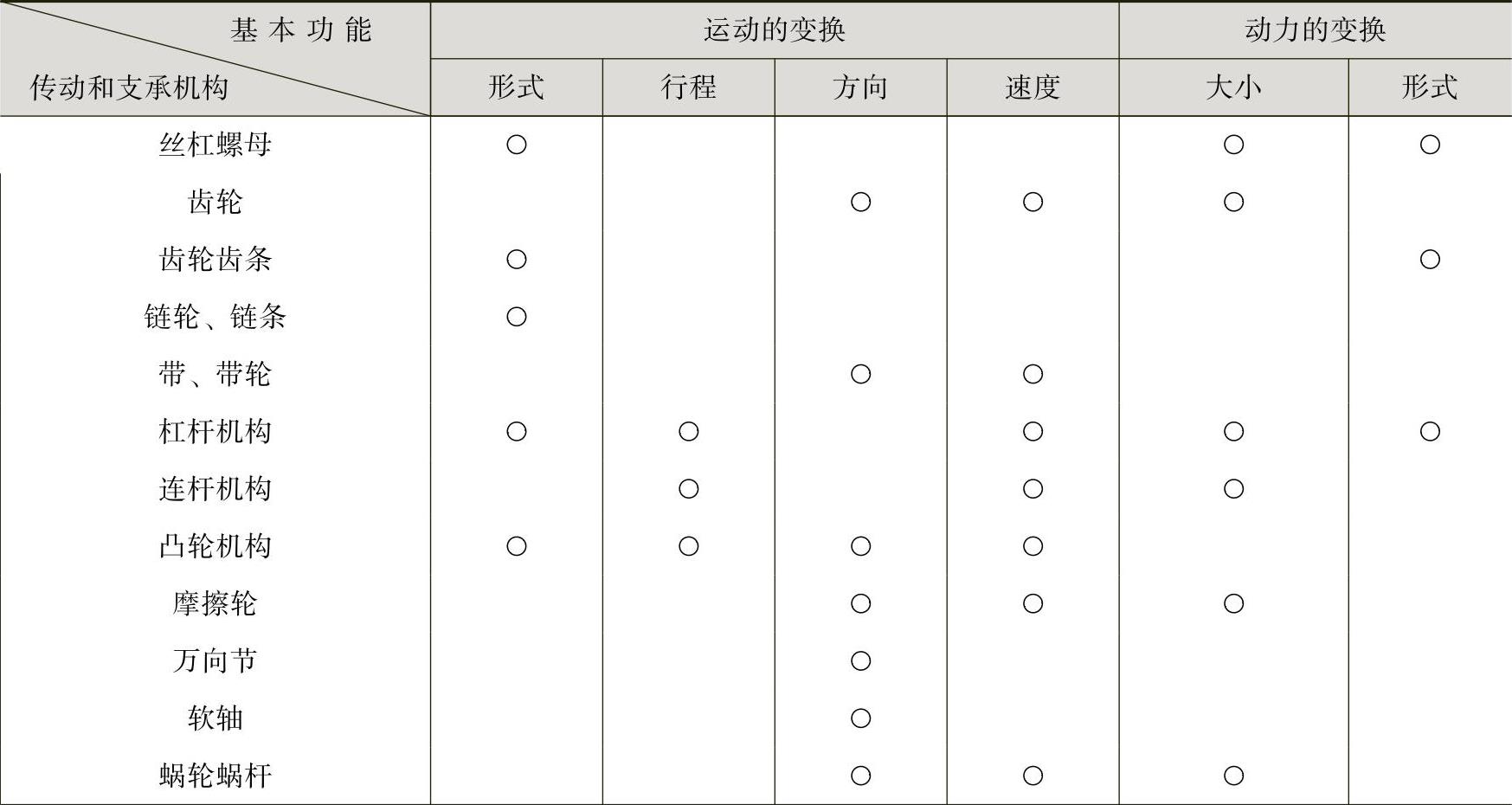
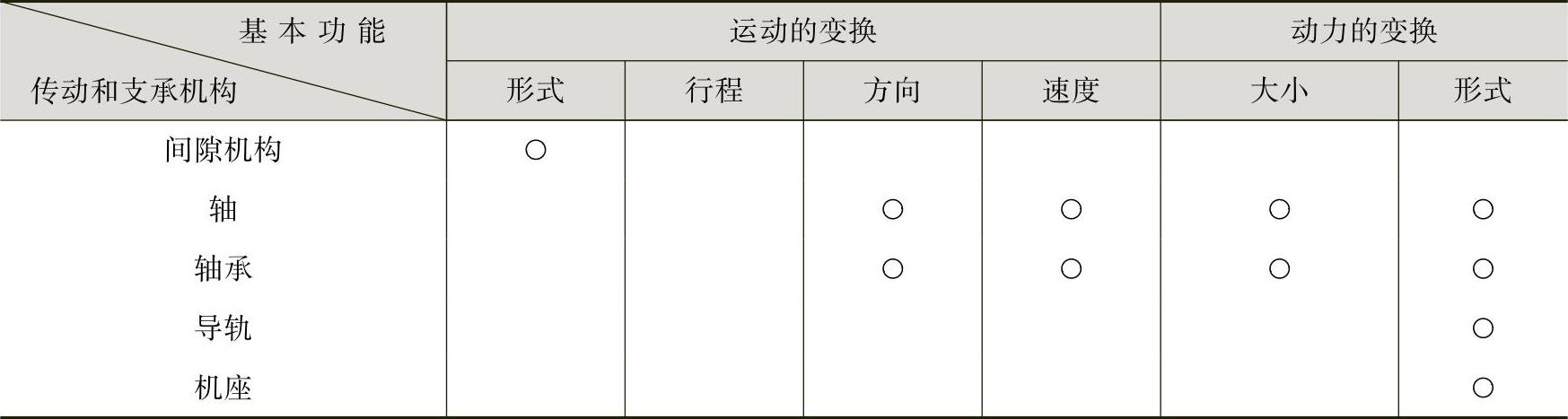
机电一体化系统中所用的传动和支承机构及其功能见表3-1。从表中看出,一种传动和支承机构可同时满足一项或几项功能要求。如齿轮齿条传动既可以将直线运动转换为回转运动,又可以将回转运动转化为直线运动;带传动、蜗轮蜗杆传动及各类齿轮减速器不但可以变速,也可改变转矩。
表3-1 机电一体化系统中所用的传动和支承机构及其功能
(续)
 (www.daowen.com)
(www.daowen.com)
注:⚪表示具备此项功能。
随着机电一体化技术的发展,要求传动和支承机构不断适应新技术要求。具体有三个方面:
1)精密化——对于某种特定的机电一体化产品来说,应根据其性能要求提出适当的精密度要求,虽然不是越精密越好,但要适应产品定位精度等性能的要求。
2)高速化——产品工作效率的高低,与机械传动部分的运动速度直接相关。因此,机械传动机构应能适应高速运动的要求。
3)小型化、轻量化——随着机电一体化系统(或产品)精密化、高速化的发展,必然要求其传动机构小型化、轻量化,以提高机构运动灵敏度(响应性)、减小冲击、降低能耗。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。
有关机电一体化系统设计的文章





