有很多设备的拖动电动机在实际使用中,往往不能满负载工作,裕量较大,平时轻载较多,有时负载会有所增大(在实际设计负载内),浪费大量电能。若将此电动机改为轻载时 接而在重载时自动转换为△接,对节约电能将大大有益。
接而在重载时自动转换为△接,对节约电能将大大有益。
如图3-50所示,起动时按下起动按钮SB2(3-5),交流接触器KM1、KM2线圈得电吸合,KM1辅助常开触点(3-5)闭合自锁,KM1、KM2各自的三相主触点闭合,电动机得电为 形接法运转。指示灯HL1灭、HL2亮,说明电动机
形接法运转。指示灯HL1灭、HL2亮,说明电动机 形运转。若电动机不转换为△形运转,说明此时负载较轻。
形运转。若电动机不转换为△形运转,说明此时负载较轻。
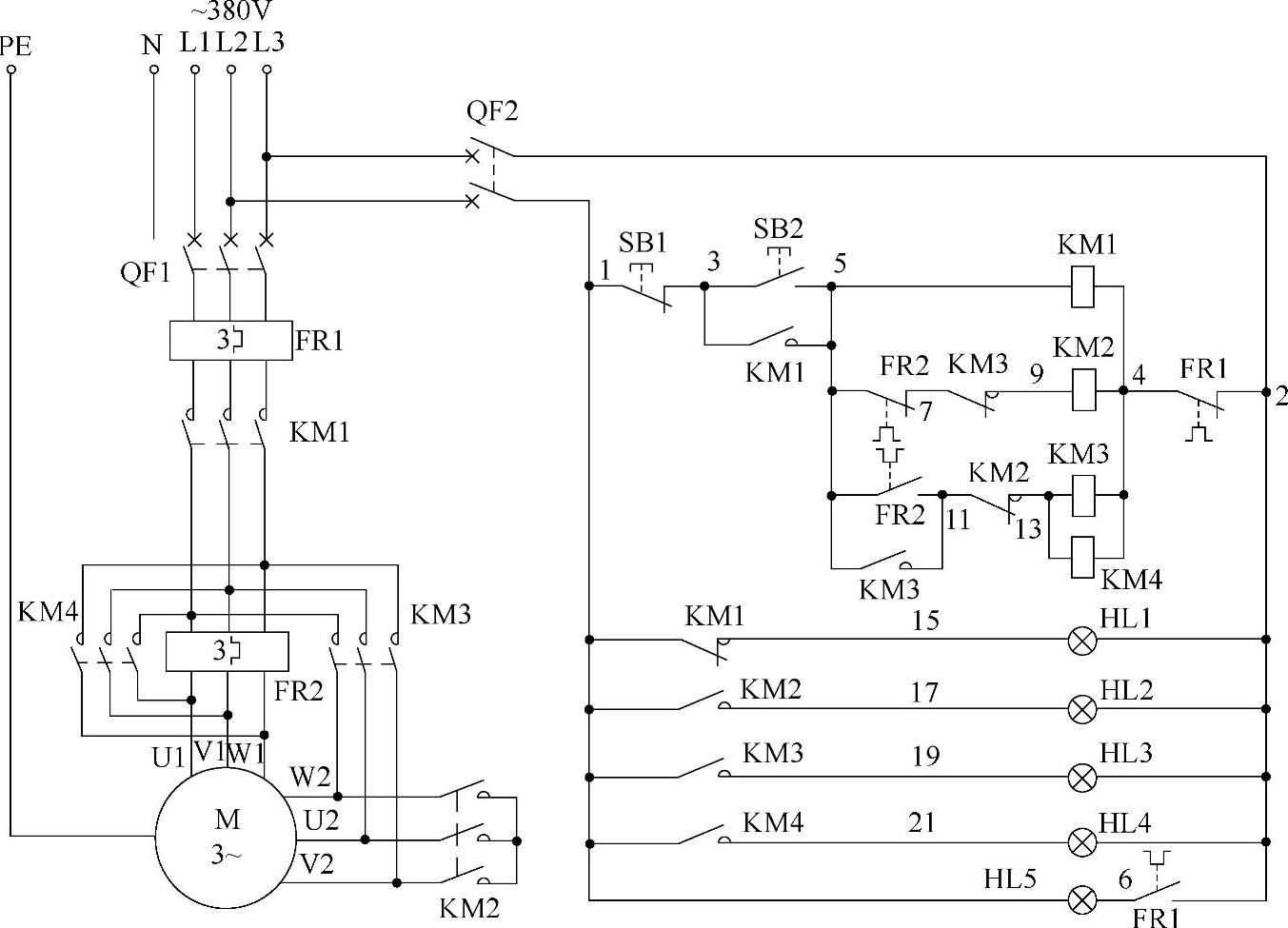
图 3-50(www.daowen.com)
当运行中电动机的负载变化增大时(不是过载), 转换用热继电器FR2的控制常闭触点(5-7)断开,
转换用热继电器FR2的控制常闭触点(5-7)断开, 点交流接触器KM2线圈断电释放,其三相主触点断开,解除
点交流接触器KM2线圈断电释放,其三相主触点断开,解除 点,同时FR2的控制常开触点(5-11)闭合,接通△形交流接触器KM3和短接负载转换用热继电器FR2热元件的交流接触器KM4线圈得电吸合,KM3辅助常开触点(5-11)闭合自锁;KM3三相主触点闭合,电动机转换为△形运转;KM4三相主触点闭合,将热继电器FR2热元件短接起来,以防止热继电器热元件长期发热弯曲造成损坏。此时指示灯HL2灭、HL3亮,说明电动机得电已△形运转,同时HL4亮,说明热继电器FR2热元件已被短接了。
点,同时FR2的控制常开触点(5-11)闭合,接通△形交流接触器KM3和短接负载转换用热继电器FR2热元件的交流接触器KM4线圈得电吸合,KM3辅助常开触点(5-11)闭合自锁;KM3三相主触点闭合,电动机转换为△形运转;KM4三相主触点闭合,将热继电器FR2热元件短接起来,以防止热继电器热元件长期发热弯曲造成损坏。此时指示灯HL2灭、HL3亮,说明电动机得电已△形运转,同时HL4亮,说明热继电器FR2热元件已被短接了。
电路中热继电器FR1为过载热继电器,当电动机出现过载时,它出现动作,其控制常闭触点(2-4)断开,使电动机失电停止运转,同时其控制常开触点(2-6)闭合,使过载指示灯HL5亮,说明电动机已过载了。热继电器FR1复位方式调至手动方式。电路中热继电器FR2为负载转换用热继电器,其整定电流按实际测量的通常负载电流而定;复位方式调至自动方式。
值得注意的是,当电动机负载增大转换为△形运转后,即使过一段时间负载又降了下来,虽然热继电器已自动复位,但控制电路因KM3辅助常开触点(5-11)已闭合自锁而不会改变,仍以△形工作,电动机仍继续△形运转。只有在按下停止按钮SB1(1-3)后,重新起动SB2(3-5),若此时负载很轻,电动机又会 形运转。
形运转。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






