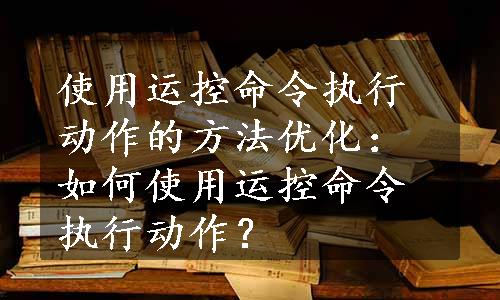
图6-128 选择进入运控命令
这是在Studio5000的编程软件中操控的,一般用来调试或测试轴的运转情况,必须在线连接到控制器进行。在执行运控命令之前,要确认运控系统一切就绪,如驱动器模块工作正常、网络工作正常、端口工作正常。
在运控组中,选中“Axis 1”,右击下拉,选中“Motion Direct Commands...”,如图6-128所示。
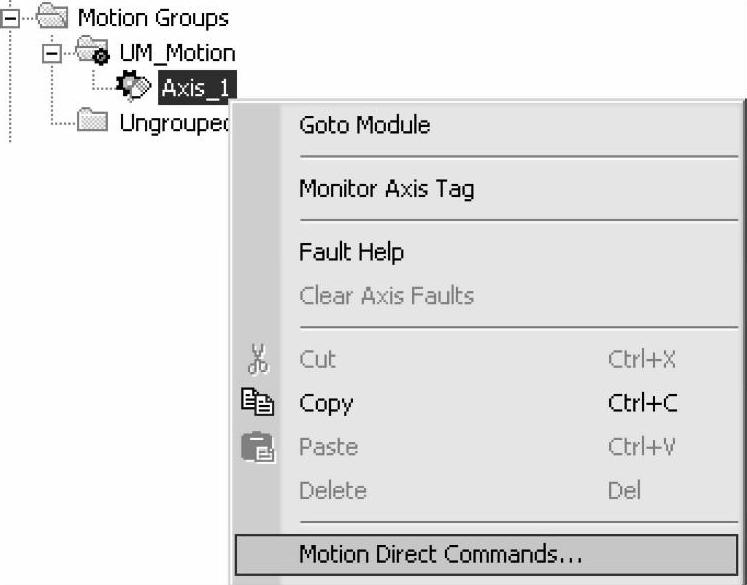
单击 ,进入运控命令操作选择页面,如图6-129所示。
,进入运控命令操作选择页面,如图6-129所示。
说明:
●Axis:选择要操作的运动轴对象。
●Commands:选择要操作的运控命令,按
运控命令分类:
—Motion State:关于运控状态的操作,如
伺服使能、伺服禁止、运动轴关闭、运动轴关闭复位、驱动器使能、驱动器禁止、驱动器启动和运动轴故障复位。
—Motion Move:关于运控运行的操作,如运动轴停止、运动轴归零、运动轴点动、运动轴移动、运动轴电子齿轮、运动轴动态改变和运动轴重定义位置。
—Motion Group:关于运控组的操作,如运控组停止、运控组关闭、运控组关闭复位和运控组选通位置。
—Motion Event:关于运控触发事件的操作,如位置监视、位置监视取消、位置注册和位置注册取消。
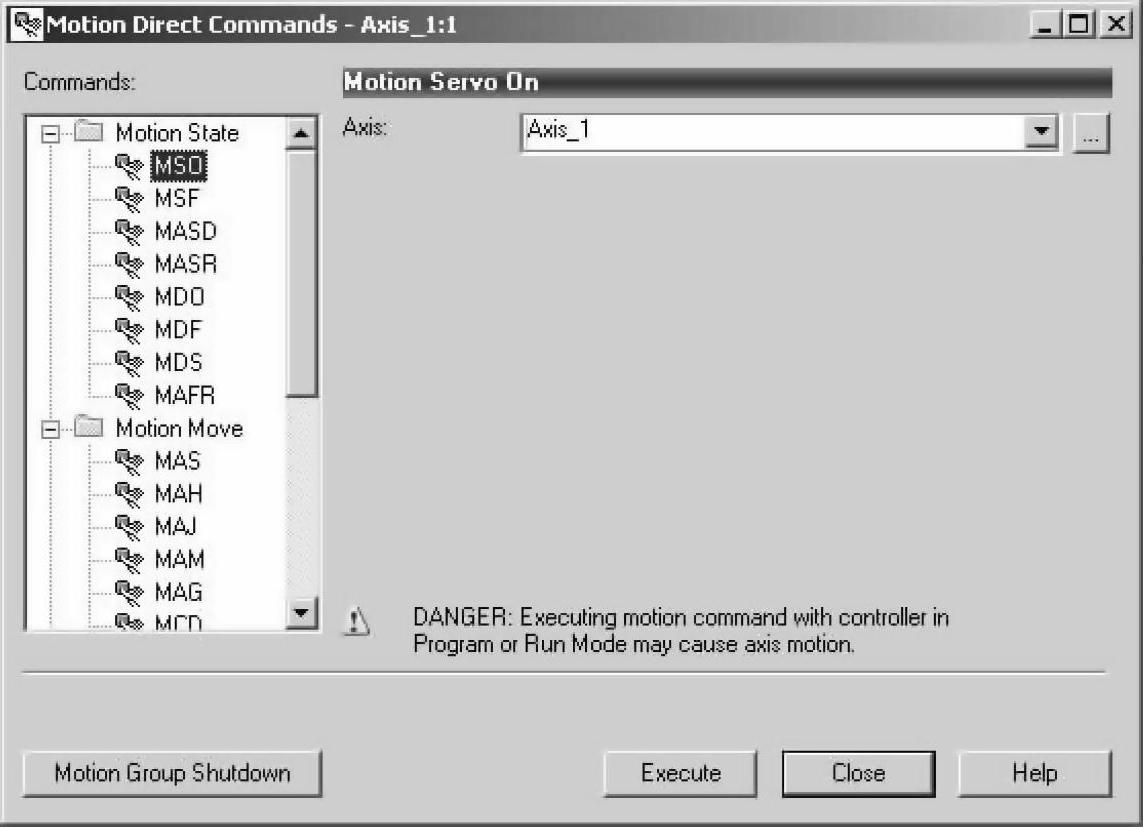
图6-129 运控命令操作选择页面
1.伺服使能命令
选择“MSO”命令,如图6-130所示,这是伺服使能命令,让运动轴执行任何命令之前,必须先执行伺服使能命令。
图6-130 选择伺服使能命令
单击 ,伺服使能命令执行,下面执行运控命令才能有效。(www.daowen.com)
,伺服使能命令执行,下面执行运控命令才能有效。(www.daowen.com)
2.运动轴点动命令
选择“MAJ”命令,如图6-131所示,这是运动轴点动命令,执行时按照设定的速度运动轴旋转,如每秒旋转2周,直到执行停止命令,运动轴才停止运转。
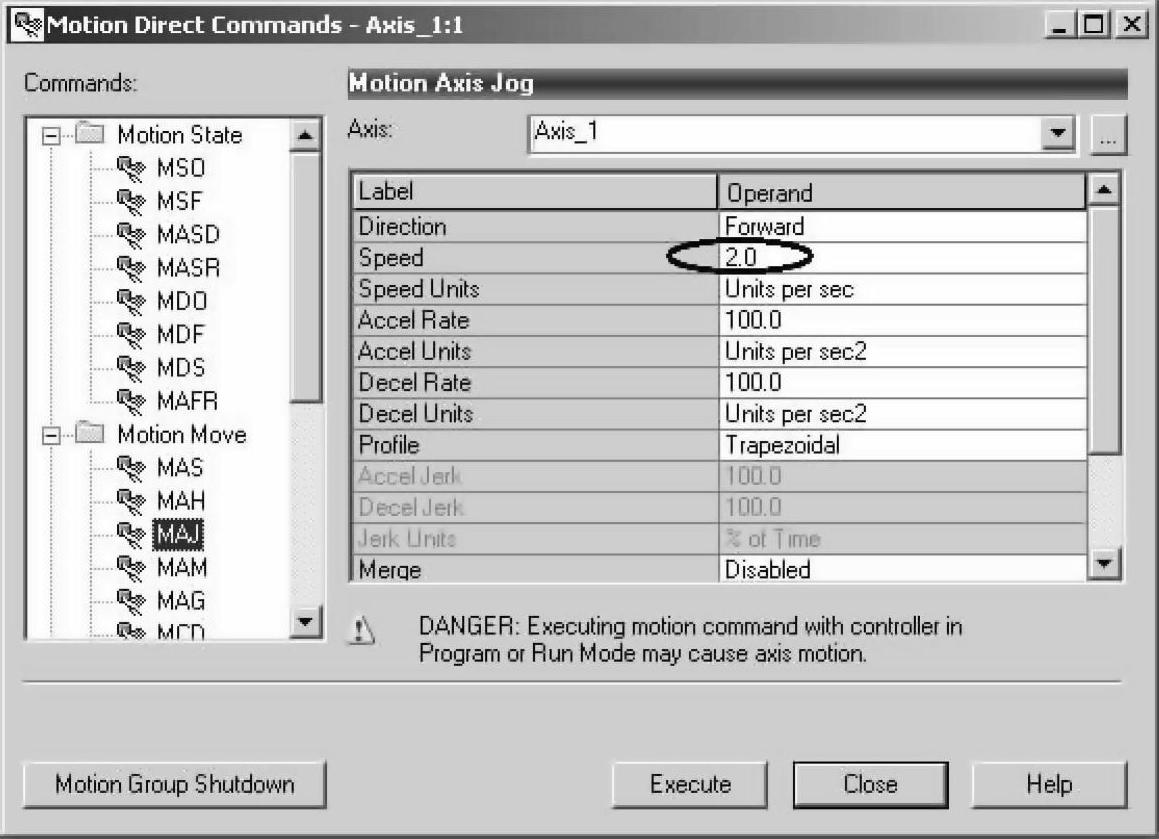
图6-131 运动轴点动命令
单击 ,运动轴点动命令执行,可观察到运动轴按照指定的速度旋转。
,运动轴点动命令执行,可观察到运动轴按照指定的速度旋转。
3.动态改变命令
选择“MCD”命令,如图6-132所示,这是动态改变参数的命令,选择“Yes”或“No”决定改变何种参数,然后键入要改变的数值。例如,将原来的速度改为10,令运动轴的按照每秒10周的速度旋转。
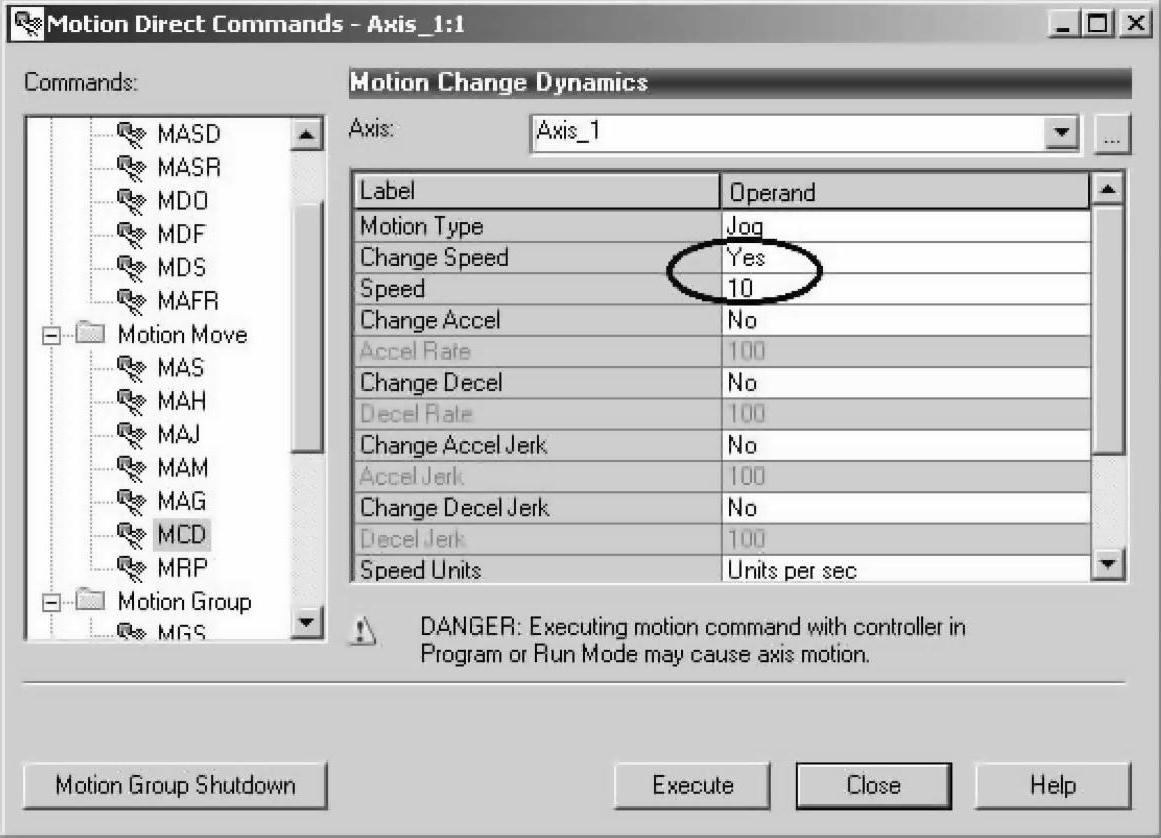
图6-132 改变速度命令
单击 ,运动轴在运行过程中改变了速度,可观察到运动轴的速度旋转加快了5倍。
,运动轴在运行过程中改变了速度,可观察到运动轴的速度旋转加快了5倍。
4.运动轴停止命令
选择“MAS”命令,如图6-133所示,这是运动轴停止的命令,执行时令运动轴停止旋转。
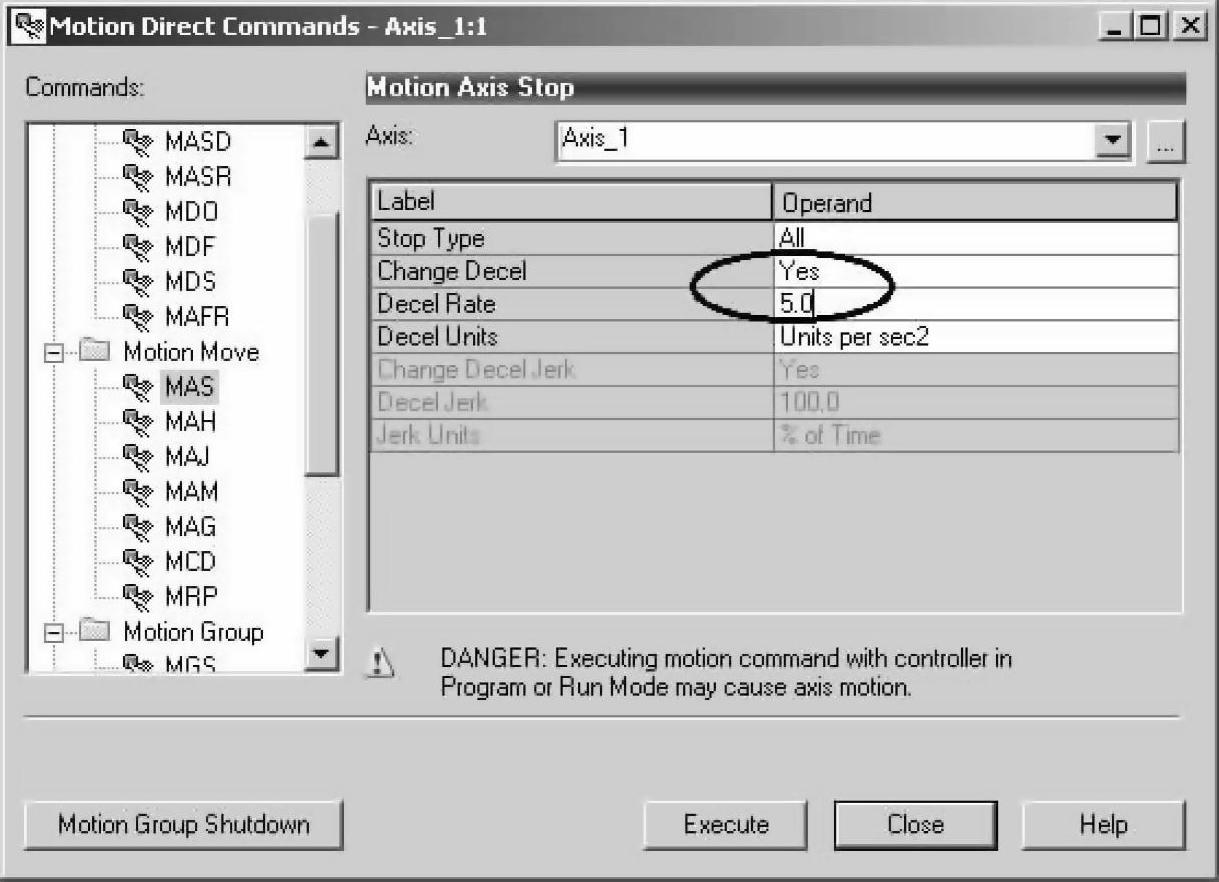
图6-133 运动轴停止命令
单击 ,不管之前执行的何种命令,可令运动轴停下。
,不管之前执行的何种命令,可令运动轴停下。
5.伺服禁止命令
选择“MSF”命令,如图6-134所示,这是伺服禁止命令,运动轴执行任何命令之后,都要执行伺服禁止命令。
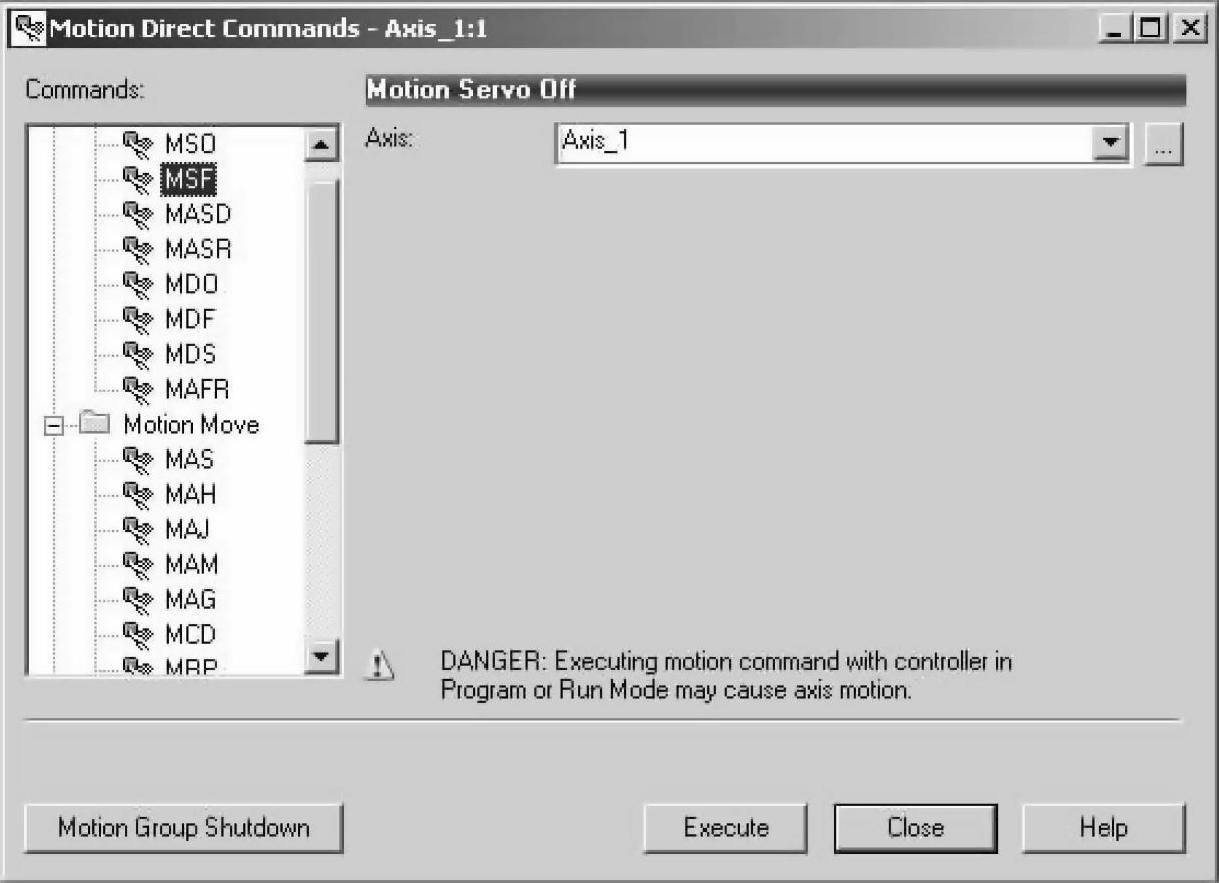
图6-134 伺服禁止命令
单击 ,伺服禁止命令执行,以后执行运控命令无效。
,伺服禁止命令执行,以后执行运控命令无效。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







