
在组态运控模块属性中,每个Kinetix 5500伺服驱动的供电组态页面,可以完成从一个或更多的伺服系统,到多母线共享(电源)组的组态。
一个逻辑的伺服系统运控组可能拥有多个物理的共享电源组,物理的共享电源组相互是独立的,一个Group中的故障的驱动器将不会影响另一个Group的运行,尽管两个Group所有的驱动器在控制器项目中的同一个运控组,因为Group只是硬件结构上的区分。
在运控模块属性组态的Power页面,下拉母线共享组,如图6-119所示。
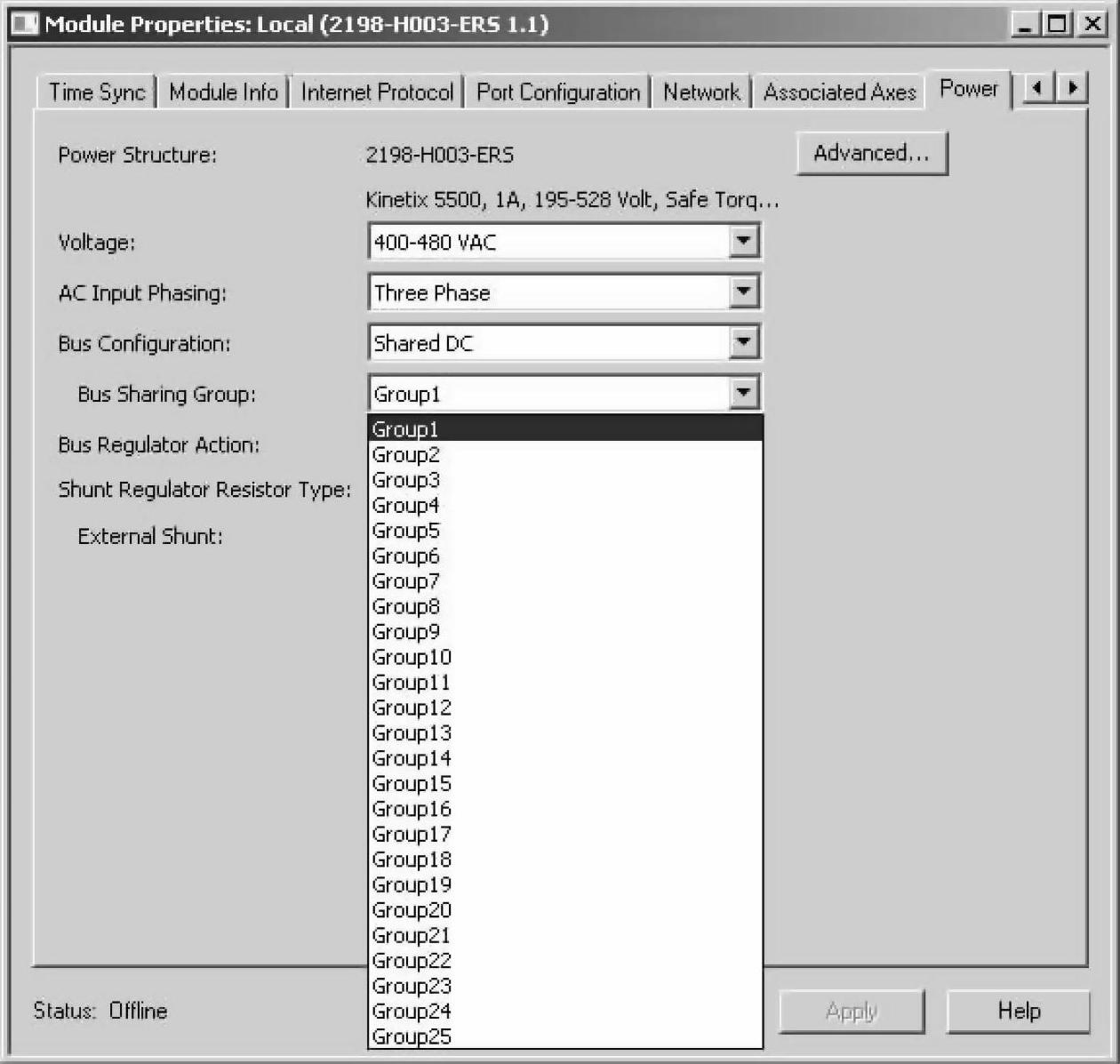
图6-119 母线共享组选择页面
最多有25个母线共享组可以使用,母线共享组不能用于母线组态为Standalone的。
当独立组按照母线组态来组态,Standalone(变为灰)也按照母线共享组来组态,如图6-120所示。
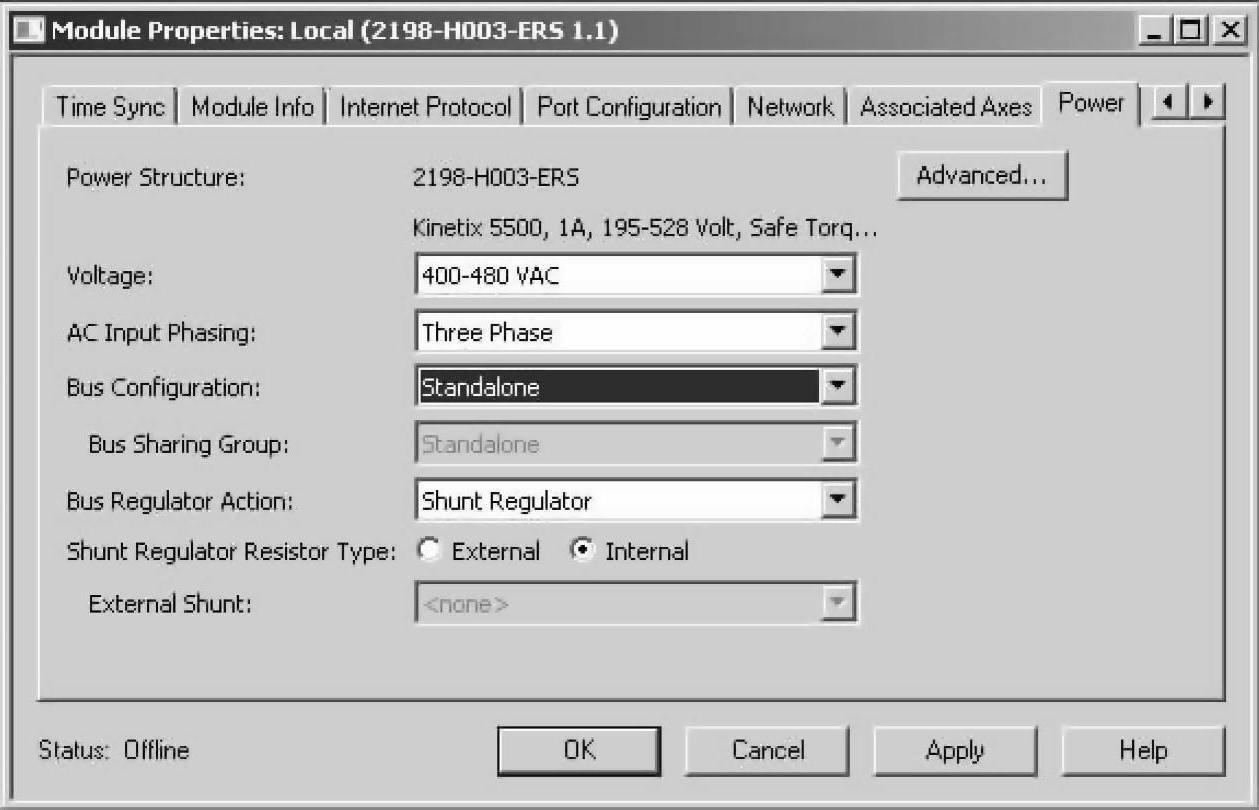
图6-120 独立组的母线组态
现在,通过一个实例来说明母线共享组的组态。
在这个例子,运控应用中需要支持12个轴,所有的12个轴被组态在控制器项目中的同一个运控组。然而,运控的12个轴按照两个母线共享组和一个独立驱动来组态。建立两个母线共享组,Group1中故障的逆变器驱动器仅禁止Group1驱动器,不会影响Group2中的驱动器或独立驱动器的运行。
实例如图6-121所示。
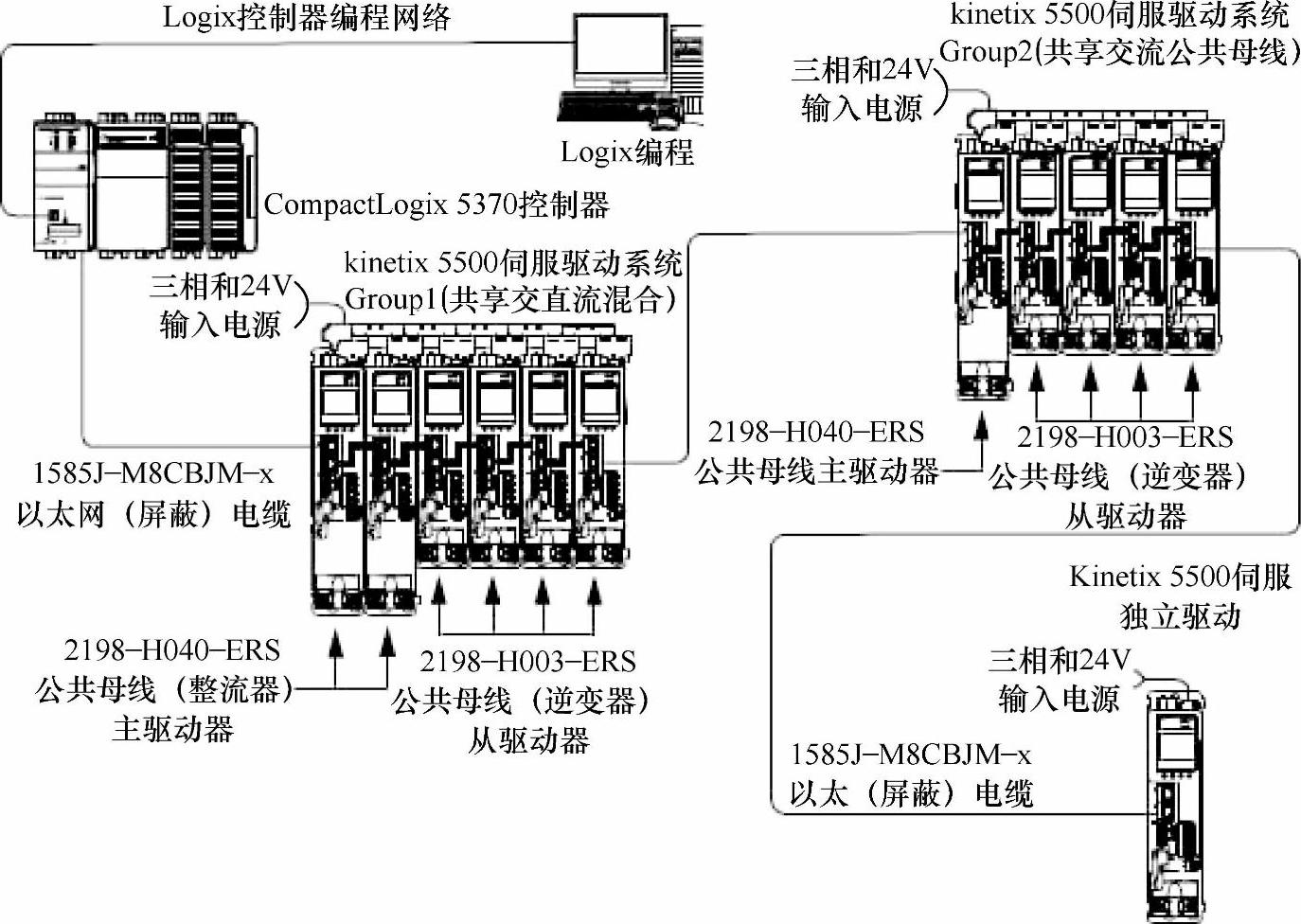
图6-121 母线共享组实例
在控制器项目中运控组的轴(逻辑的)与电源组(物理的)的关系,如图6-122所示。
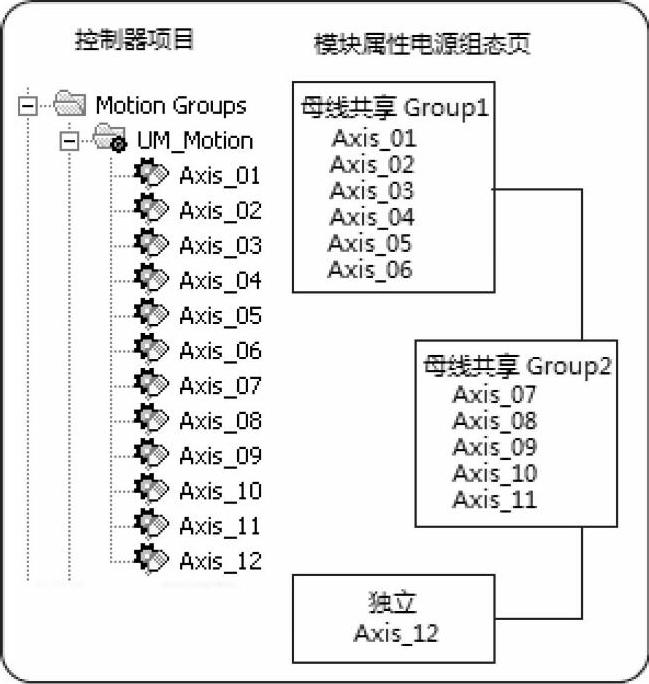
图6-122 运控轴分组
运动轴1~6属于一个母线共享组Group1;运动轴7~11属于一个母线共享组Group2;运动轴12有一个独立的驱动器,没有母线共享,这些都要单独地进行组态。
运控组中的Group1是共享交流/直流混合组态,前面两个整流器驱动器母线组态共享交流/直流,逆变器驱动器母线组态共享直流。(www.daowen.com)
Group1整流器驱动器组态页面如图6-123所示。
Group1逆变器驱动器组态页面如图6-124所示。
运控组中的Group2是共享直流(公共母线)组态,主驱动器的母线组态共享交流/直流,从驱动器的母线组态共享直流。
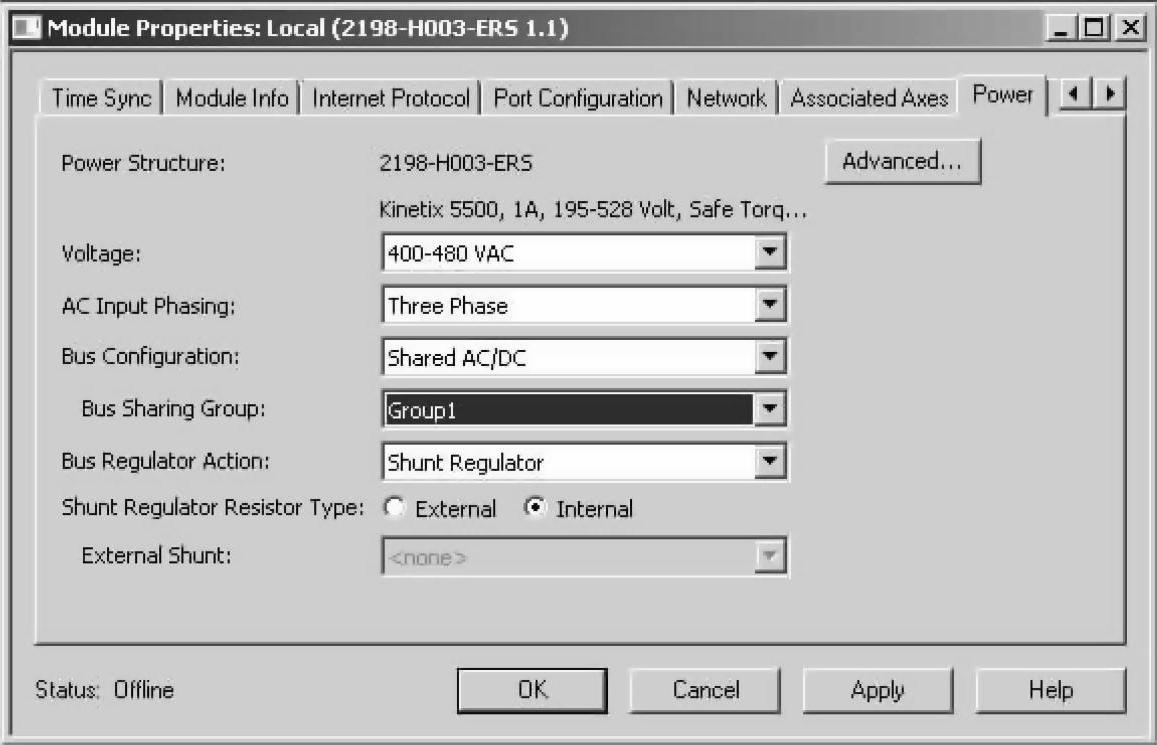
图6-123 Group1整流器驱动器组态页面
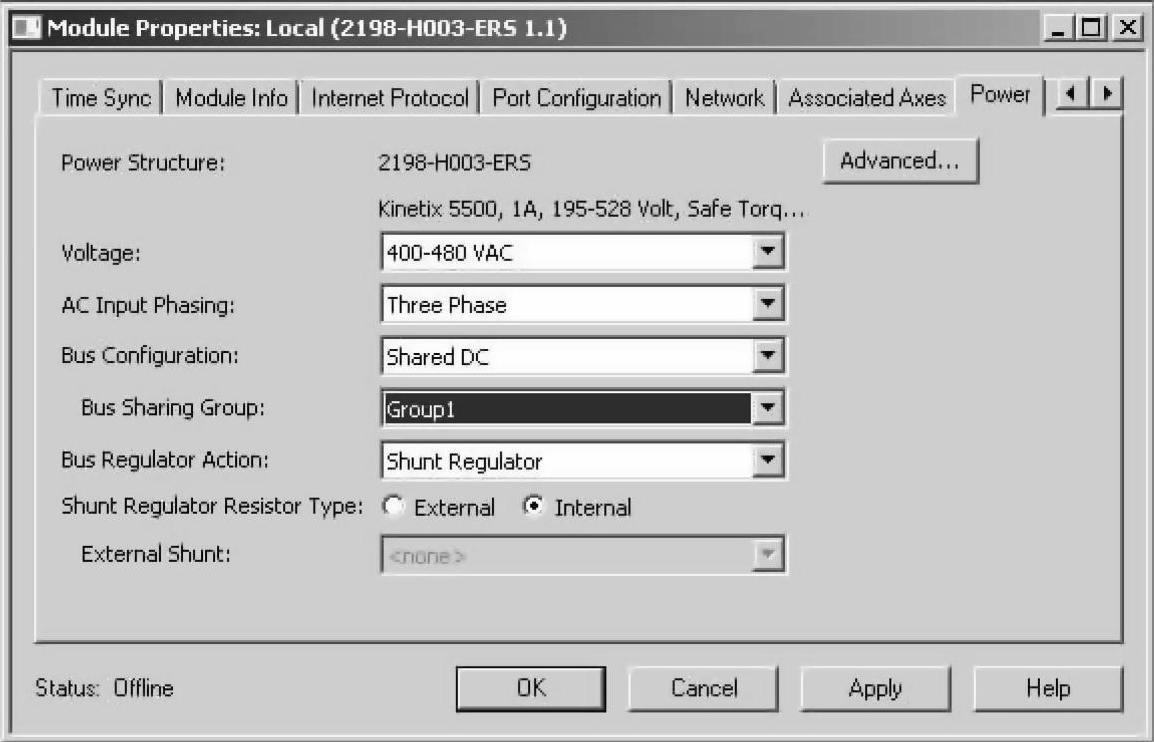
图6-124 Group1逆变器驱动器组态页面
Group2主驱动器组态页面如图6-125所示。
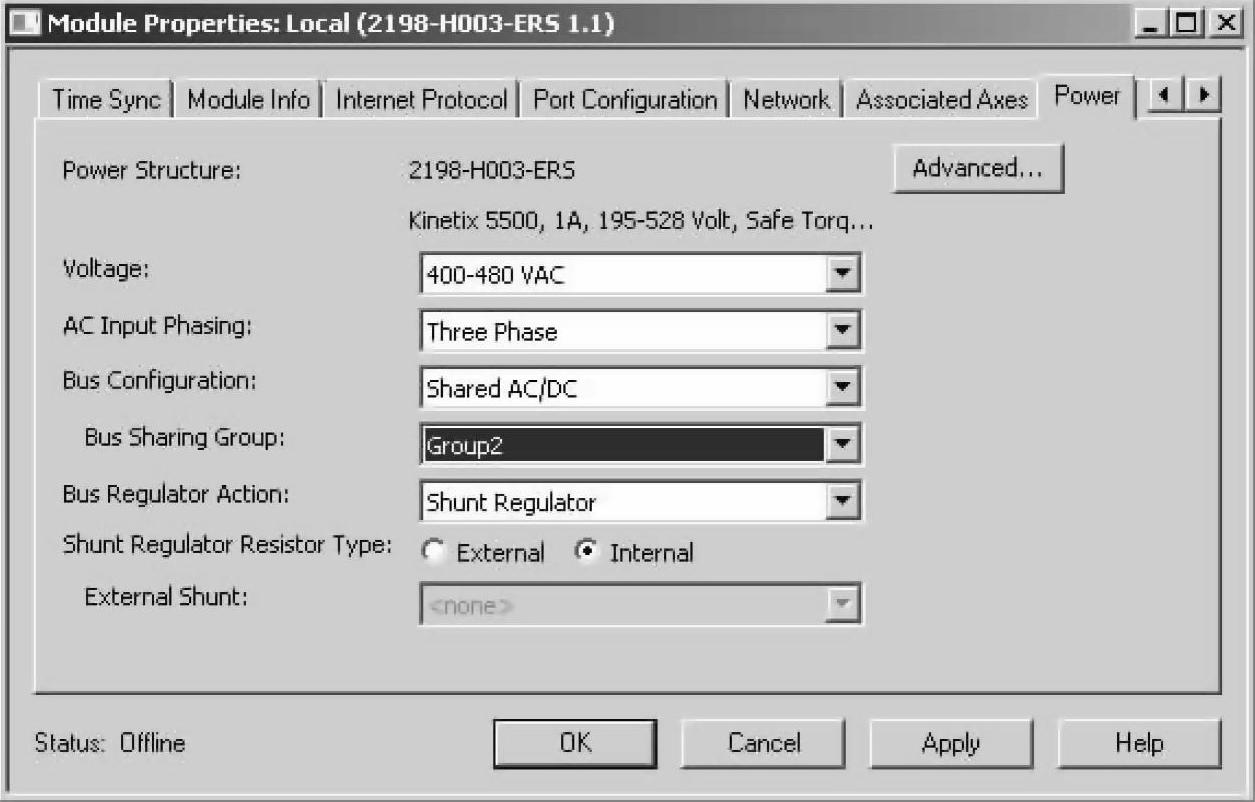
图6-125 Group2主驱动器组态页面
Group2从驱动器组态页面如图6-126所示。
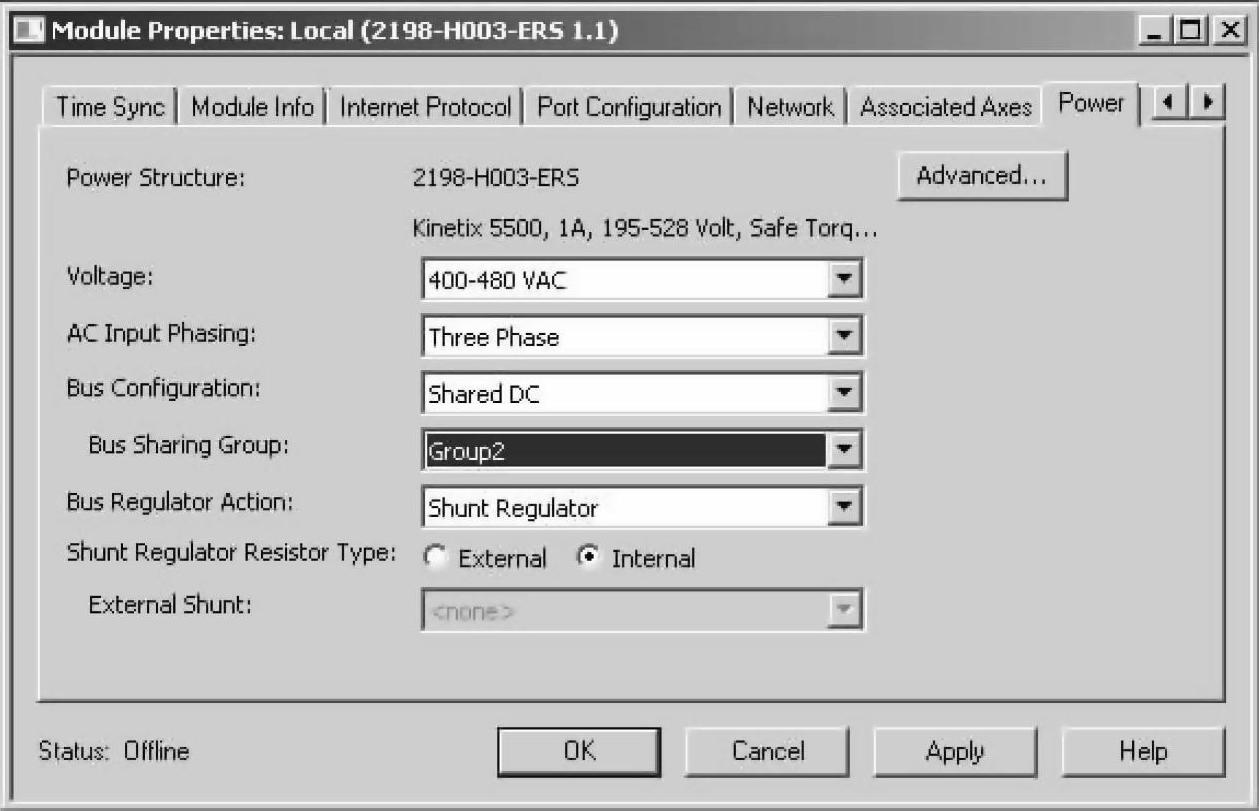
图6-126 Group2从驱动器组态页面
运控组中的独立驱动器组态页面如图6-127所示。
以上实例可以知道,同一个运控组的母线共享组态,需要分别独立地完成。
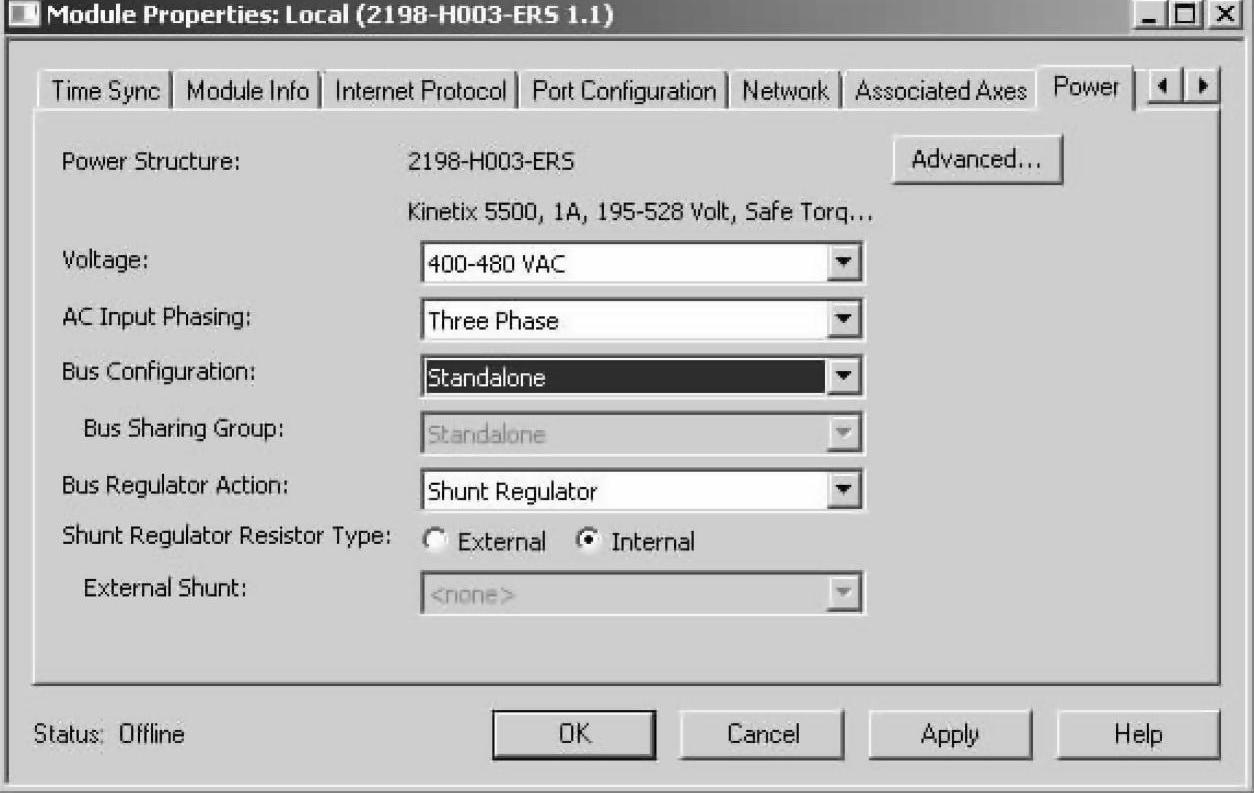
图6-127 独立驱动器组态页面
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




