在线连接控制器项目,通过运动轴组态属性的操作,可以对Kinetix 5500驱动系统进行运动轴测试和运动轴自整定。
在进行运动轴测试和运动轴自整定之前,要对Kinetix 5500系统和Logix 5000控制器进行接线和组态的检查,以确保系统处于正常工作状态。
以下是Kinetix 5500系统上电的步骤:
(1)将电动机上的负载解除,令电动机在空载状态。
(2)接通24V直流控制电源。LCD显示屏开始起动顺序,如果起动顺序没有开始,检查24V控制电源连接是否正确。
(3)当起动过程完成时,核实两个状态指示灯是绿色常亮,且运动轴状态显示是PRE-CHARGE。如果运动轴状态没有达到PRECHARGE,且两个状态指示灯不是绿色常亮,参看状态指示灯的含义。
(4)接通主回路输入电源并监视LCD显示的交流母线电压。如果交流母线没有达到期望的电压值,检查三相输入电源连接。驱动器能够接收运控命令之前,输入电源供电之后,大约要等待1.8s。
(5)核实运动轴状态改变为STOPPED。如果运动轴状态没有改变为STOPPED,参照故障代码,解决可能遇到的问题。
1.运动轴测试
运动轴测试的步骤如下:
(1)检查每个运动轴的负载是否已经移除。
(2)在运控组的下面,右击运动轴并选择属性,打开运动轴属性的页面。
(3)选中“Hookup Tests”,进入Test Motor and Feedback Device Wiring页面,测试电动机和反馈,控制方式选择为位置控制,如图6-108所示。
测试选择跟控制方式有关,可选如下:
●Motor and Feedback:核实电动机电源和反馈连接按照电动机旋转命令是接线正确的。
●Motor Feedback:核实反馈连接按照旋转电动机轴是接线正确的。
●Marker:核实标记探测按照旋转电动机轴是兼容的。
●Test Distance:键入测试距离,如旋转2周。
●Test State:显示测试的状态,如测试就绪或测试通过。
(4)为测试距离键入2,测试时电动机将会旋转2周。
(5)选择“Motor and Feedback”、“Motor Feedback”和“Marker”测试对象,跟控制方式有关。
(6)单击“Start”,弹出测试对话框,测试状态是正在执行,LCD面板上显示的也是测试,如图6-109所示。
当测试成功地完成时,测试状态从执行中改变为通过,如图6-110所示。
(7)单击“OK”,弹出询问对话框,如图6-111所示。
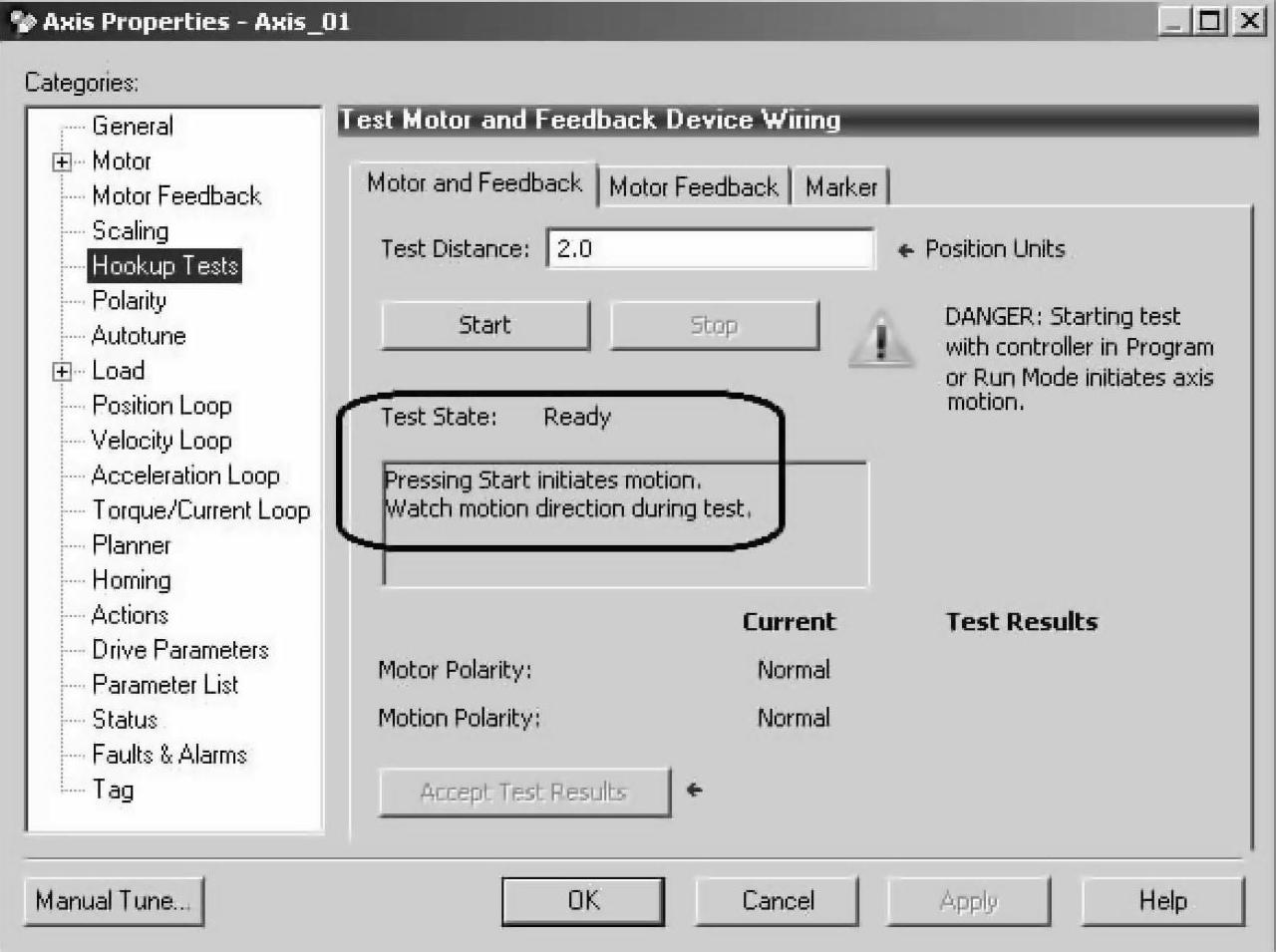
图6-108 测试电动机和反馈页面
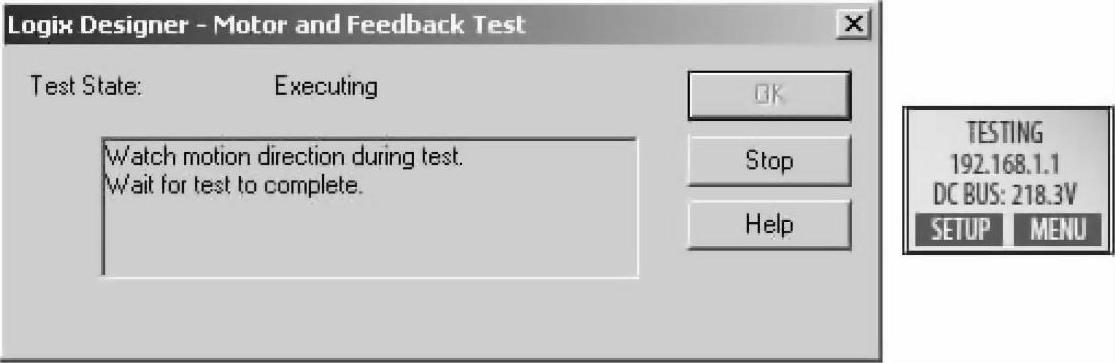
图6-109 运动轴测试过程
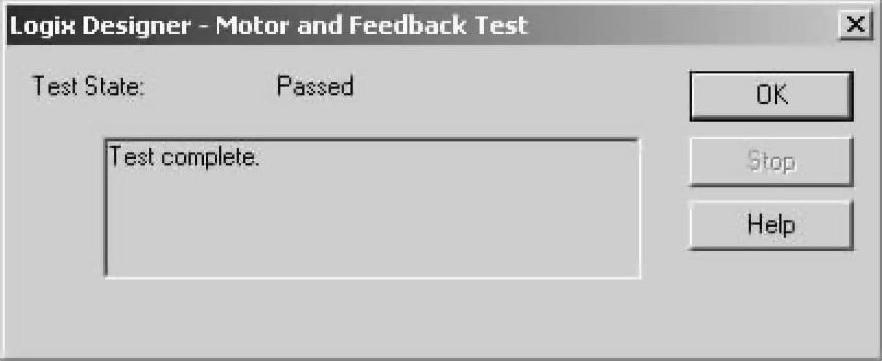
图6-110 运动轴测试完成
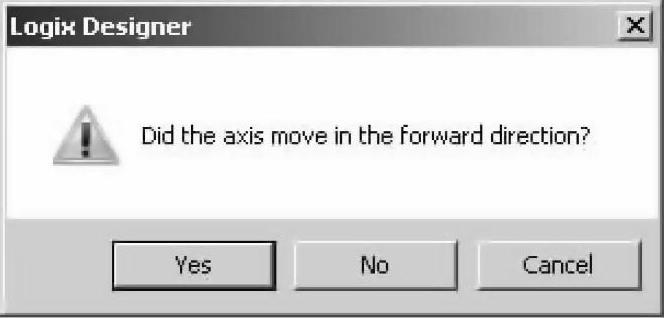
图6-111 确认测试结果
(8)如果进行过程中,轴的旋转方向是正确的,单击“Yes”,否则单击“No”。显示测试完成,如图6-112所示。
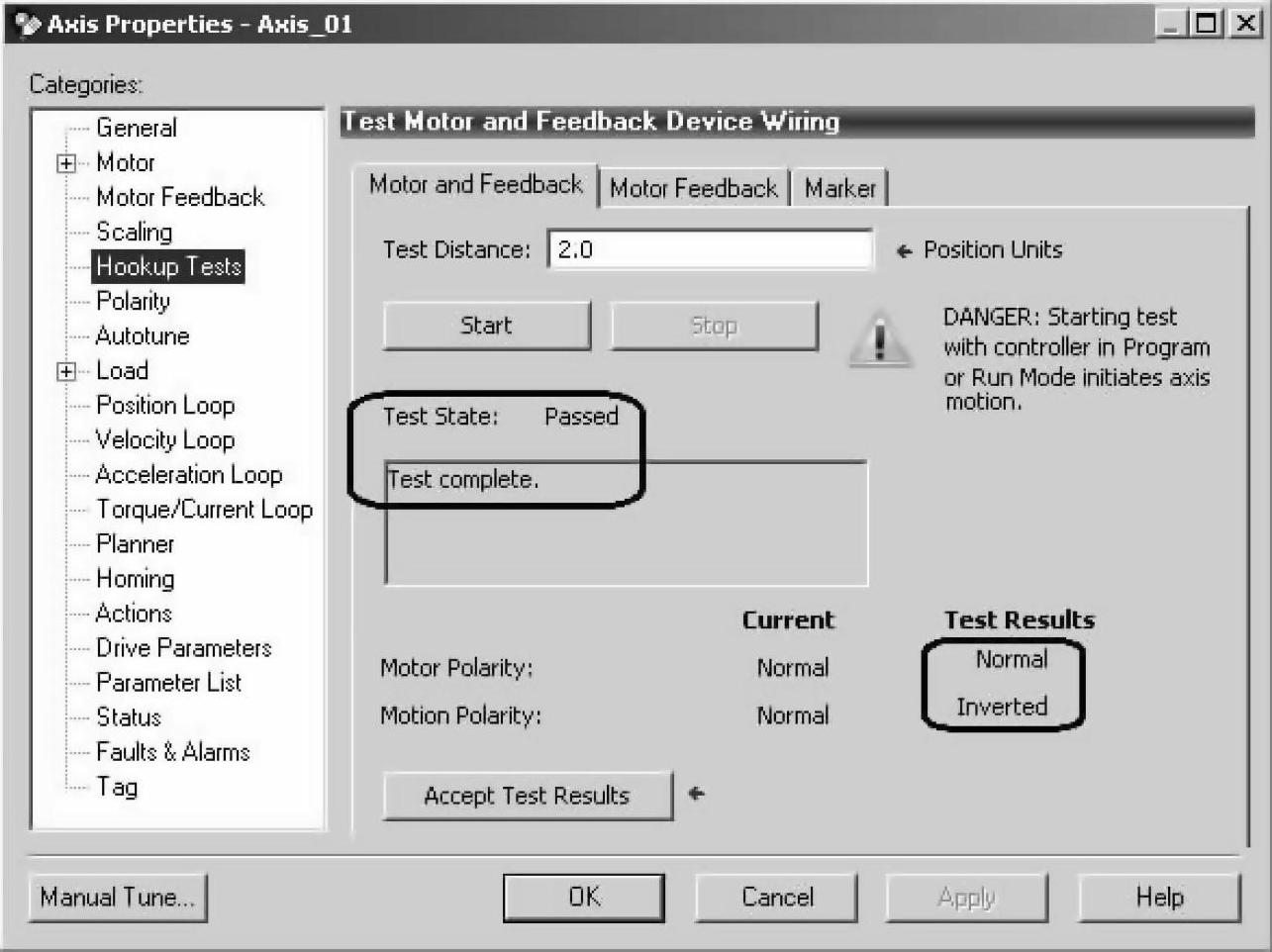
图6-112 显示测试结果
(9)单击 ,接收测试结果。
,接收测试结果。
(10)如果测试失败,将弹出对话框,如图6-113所示。
●单击“OK”。
●核实交流母线电压。
●核实键入定标页面的单位电压。
●返回第(5)步,继续测试。
2.自整定运动轴
自整定运动轴的步骤如下:(www.daowen.com)
(1)核实负载仍然是移除的,运动轴仍在空载状态。
(2)选中“Autotune”,进入Tune Control Loop by Measuring Load Characteristics页面,自整定控制闭环,如图6-114所示。
说明:
●Application Type:应用类型,有以下5种可选择:
—Custom:用户自定义,高级整定,由用户选择自整定参数。
—Basic:基本自整定,使用默认的参数。

图6-113 测试失败提示
—Tracking:跟踪自整定,适用于卷绕/开卷、飞剪和卷料的控制应用。
—Point-to-Point:点对点自整定,适用于机械手、包装和定常的控制应用。
—Constant Speed:恒速自整定,适用于传送带、传动轴和曲柄的控制应用。
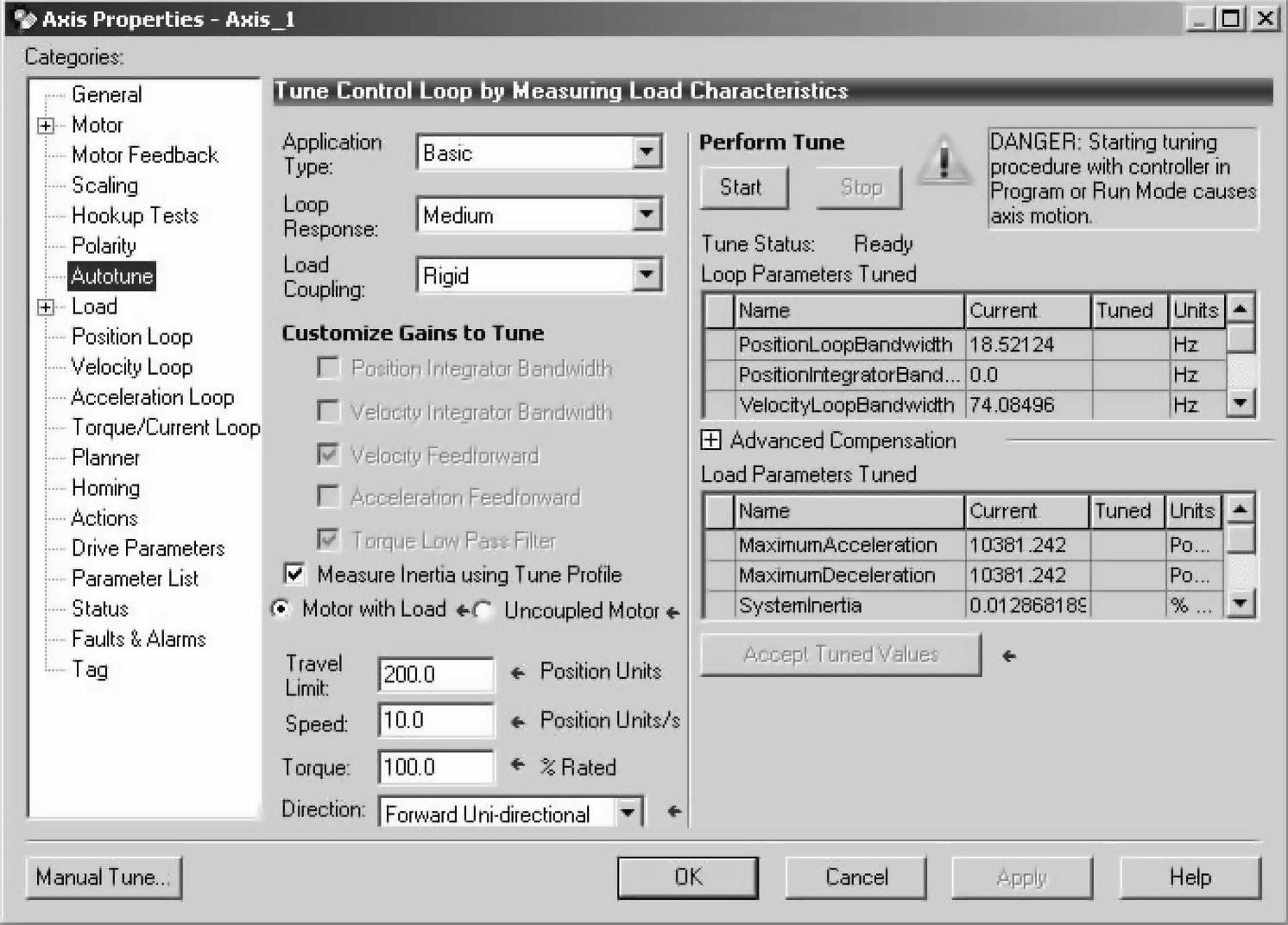
图6-114 自整定控制闭环
●Loop Response:环响应参数,有3个选择:
—Low:低,阻尼因数=1.5。
—Medium:中,阻尼因数=1.0。
—High:高,阻尼因数=0.8。
●Customize Gain to Tune:用户自定义自整定参数设定。其他应用类型将自动勾选参数。
(3)键入行程限值和速度的量值,在此例中,Travel Limit=200,Speed=10。编程实际值单位取决于应用。
(4)从“Direction”下拉菜单,选择设定合适应用的参数。默认为Forward Uni-direc-tional。
(5)为应用编辑其他的区域。
(6)单击“Start”,弹出自整定过程的对话框,如图6-115所示。
执行开始,可听到伺服电动机起动的声音,在这一过程中,伺服电动机将达到组态的速度然后减速。此过程非常短促,通常为1s左右,便完成自整定,显示成功的对话框,如图6-116所示。
整定量值移往闭环和负载参数表。一旦电动机和负载连接,实际的带宽量值(Hz)取决于应用和需要的调节器。
自整定成功完成的状态提示,以及自整定结束后的参数显示,如图6-117所示。
图6-115 自整定过程对话框
图6-116 自整定完成提示
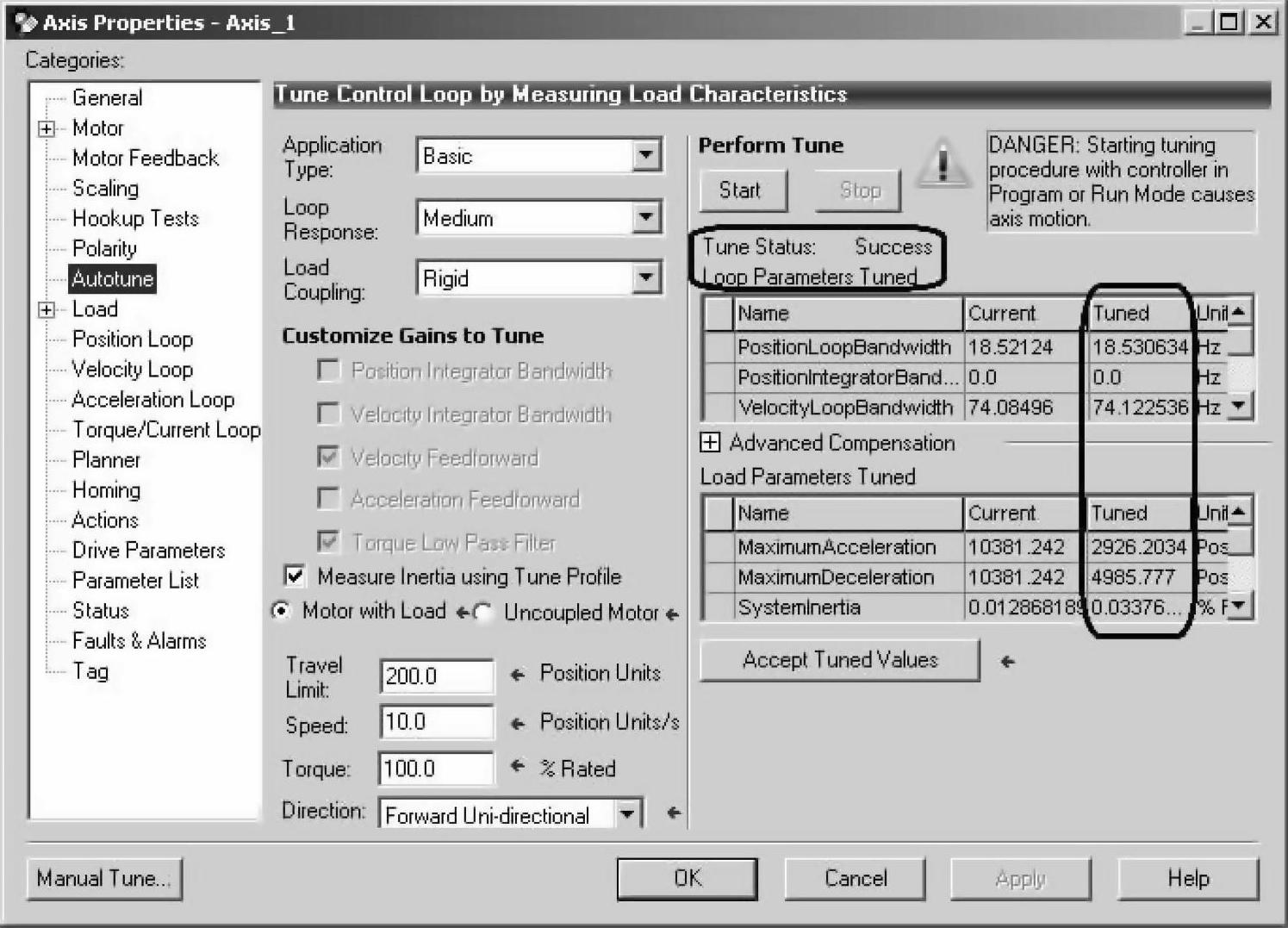
图6-117 自整定后的参数和状态显示
(7)单击 ,接收自整定的结果。
,接收自整定的结果。
(8)单击“OK”,关闭自整定页面。
(9)单击“OK”,关闭运动轴属性页面。
(10)如果测试失败,弹出对话框,如图6-118所示。
●单击“OK”。
●对电动机速度进行调节。
●需要了解更多的信息,参考控制器用户手册。
●返回第(6)步,再运行测试。
为每个运动轴重复以上测试和自整定步骤。

图6-118 自整定失败提示对话框
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







