组态运动轴的属性是非常重要的一个环节,运动控制的动作无一不是通过运动轴传递到执行器件,正确地选择运动轴的参数组态,调节好运动轴的特性,才能准确无误地实现应用的运动控制。
运动轴组态取决于与每个运动轴关联的电动机或其他设备(如外部编码器)。下面要讨论的是组态伺服电动机,包括组态电动机和外部编码器设备的准则。
可分别将运动轴组态为不同的应用模式:
●Feedback Only:仅用于反馈。
●Frequency Control:变频控制。
●Position Loop:位置闭环控制。
●Velocity Loop:速度闭环控制。
●Torque Loop:转矩闭环控制。
不同的应用模式,关联的参数组态也不相同,下面就几种不同应用模式完成它们的组态。
1.组态位置闭环控制属性
在控制器项目树形结构,选中轴“Axis_1”右击,选中“General”,进入运动轴属性常规组态页面,如图6-87所示。
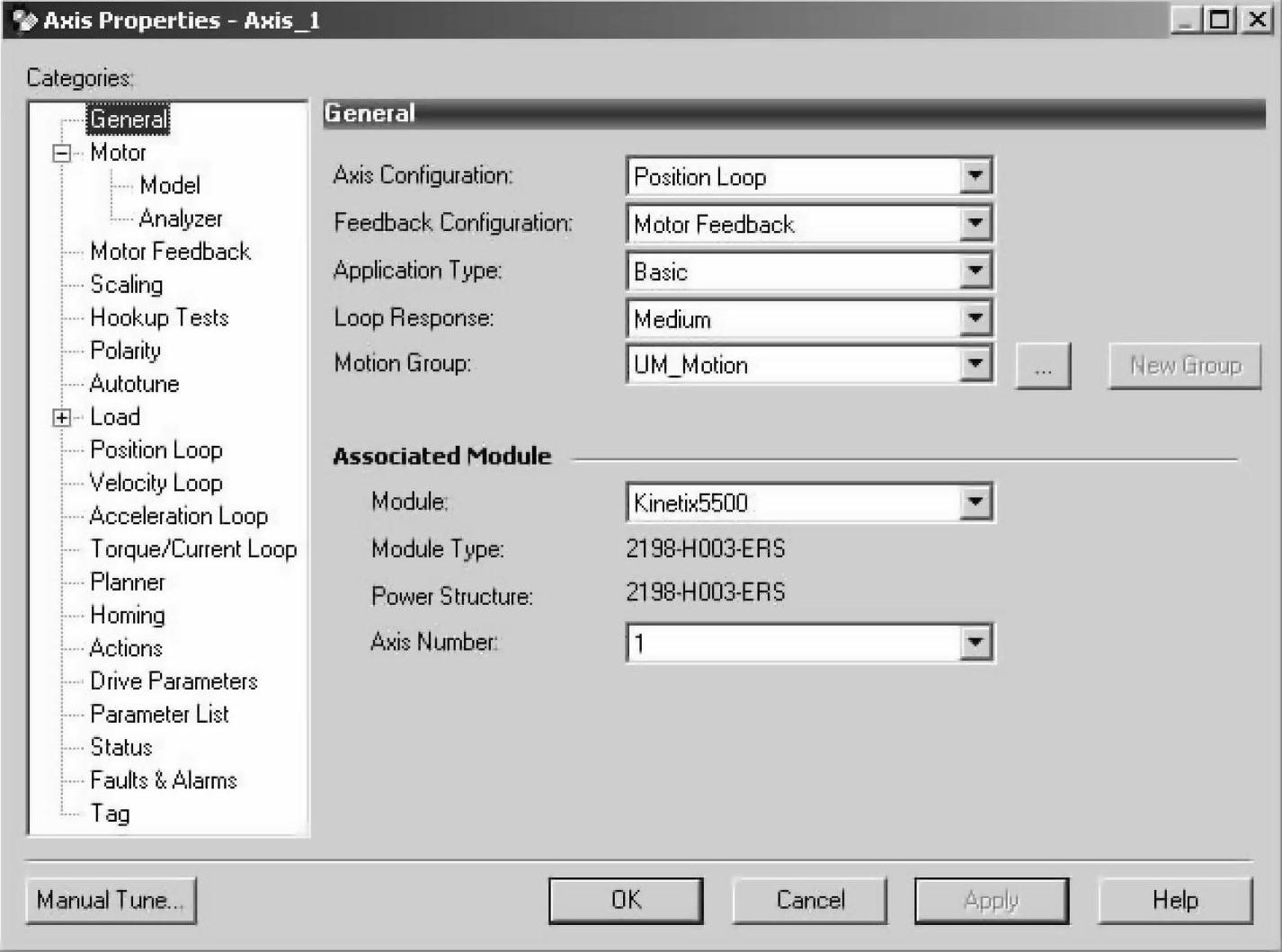
图6-87 运动轴属性常规组态页面
说明:
●Axis Configuration:可选择Position Loop,位置闭环控制。
●Feedback Configuration:反馈组态,可选Motor Feedback,电动机反馈。
●Application Type:可选择Basic、Tracking、Point-to-Point、Constant Speed和Custom。
●Loop Response:闭环响应,可选择Low、Medium和High,默认为Medium。
●Motion Group:选择运控组,只有UM_Motion可选。
●Module:选择运动轴的伺服模块,指定控制器I/O组态下其中一个伺服模块。
●Axis Number:运动轴的编号,有效的编号是1、2、3和4,已被分配的将不再出现。
选中“Motor”,进入电动机设备设定和说明的组态页面,如图6-88所示。
说明:
●Data Source:选择数据源,决定电动机参数的数据来源,有3种来源:
—Nameplate Datasheet:铭牌数据表,电动机参数直接键入,适合具有伺服电动机数据经验的使用者或第三方电动机参数的键入。
—Catalog Number:产品目录号,从运动控制数据库中获取,跟选取的电动机配合的数据。
—Motor NV:电动机非易失性存储器,通过串行接口,从电动机安装的智能反馈设备的非易失性存储器中读取,适合使用罗克韦尔自动化格式数据预编程的各种基于Hiperface或EnDat的电动机。
此处选择产品目录号,单击 ,可进入参数组的选择,如图6-89所示。
,可进入参数组的选择,如图6-89所示。
选择电动机参数组,单击 ,返回电动机设备页面。
,返回电动机设备页面。
●Catalog Number:单击 ,选择或改变电动机的产品编号,所选电动机与驱动器模块应该是相匹配的,如图6-90所示。
,选择或改变电动机的产品编号,所选电动机与驱动器模块应该是相匹配的,如图6-90所示。
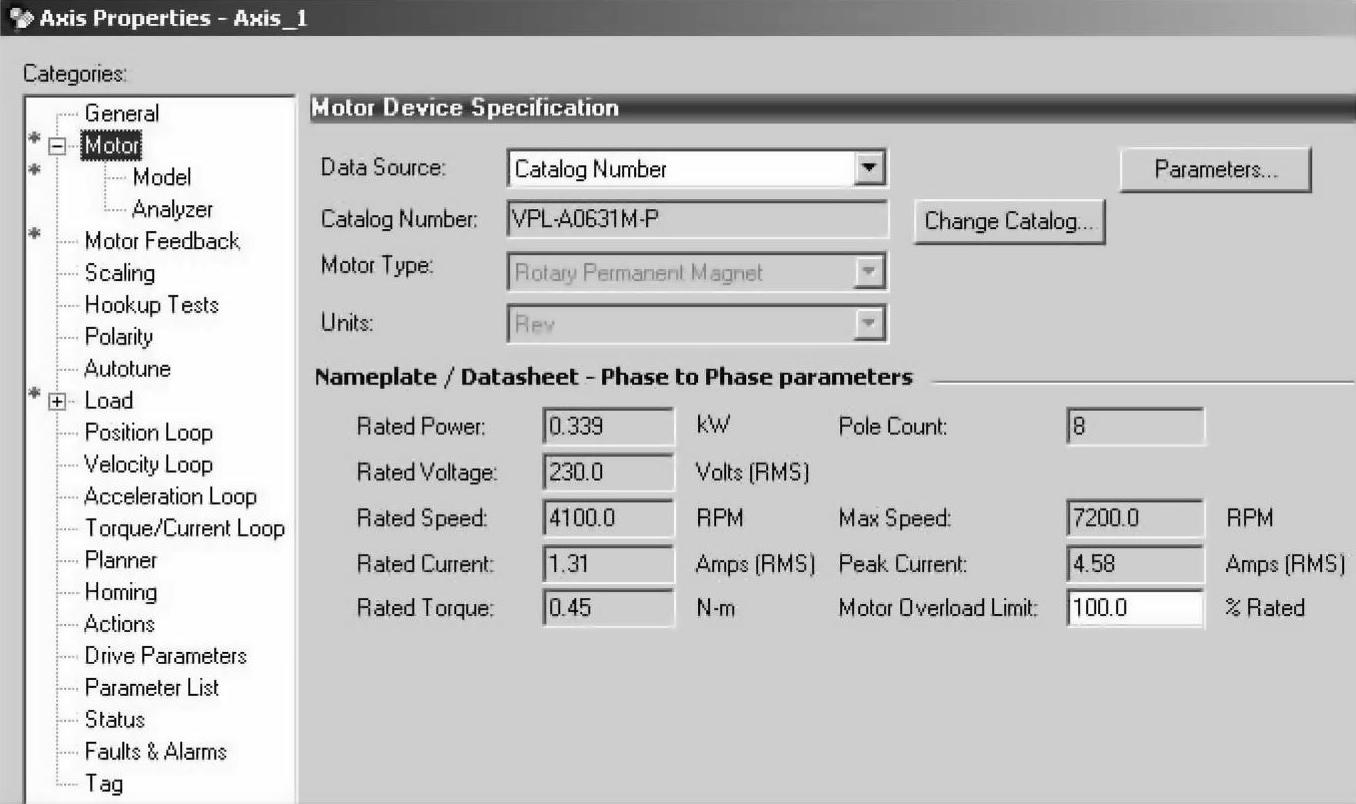
图6-88 电动机参数组态页面
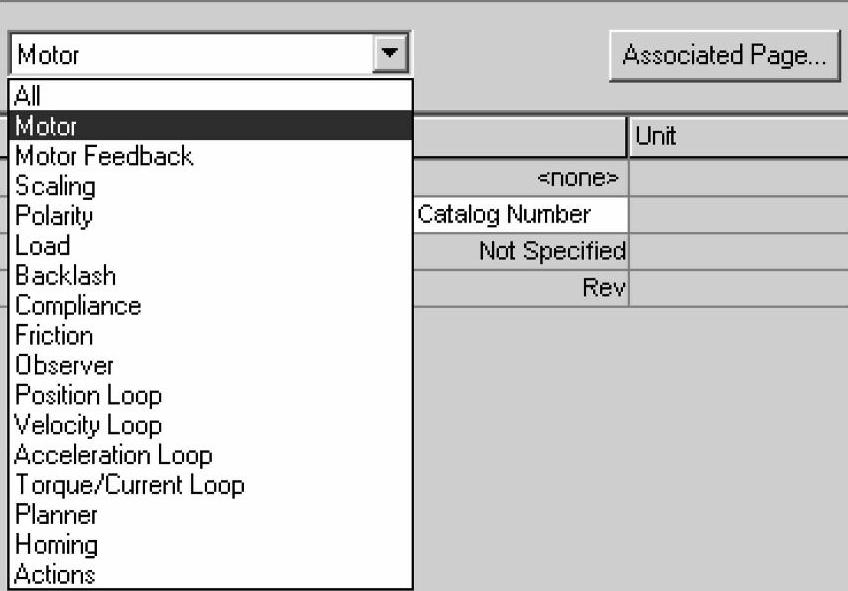
图6-89 选择参数组
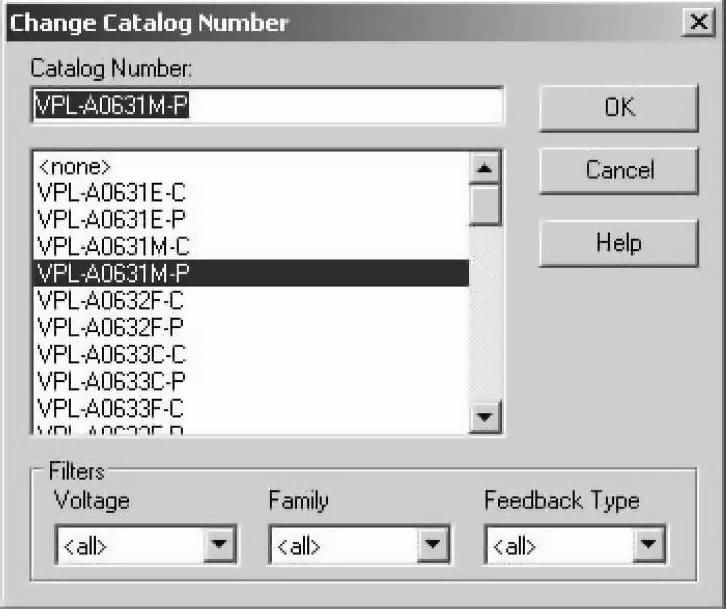
图6-90 选择合适的电动机
●Nameplate/Datasheet-Phase to Phase parameters:选定电动机的参数将显示在下面。选中“Scaling”,展现定标页面,进行定标组态,如图6-91所示。
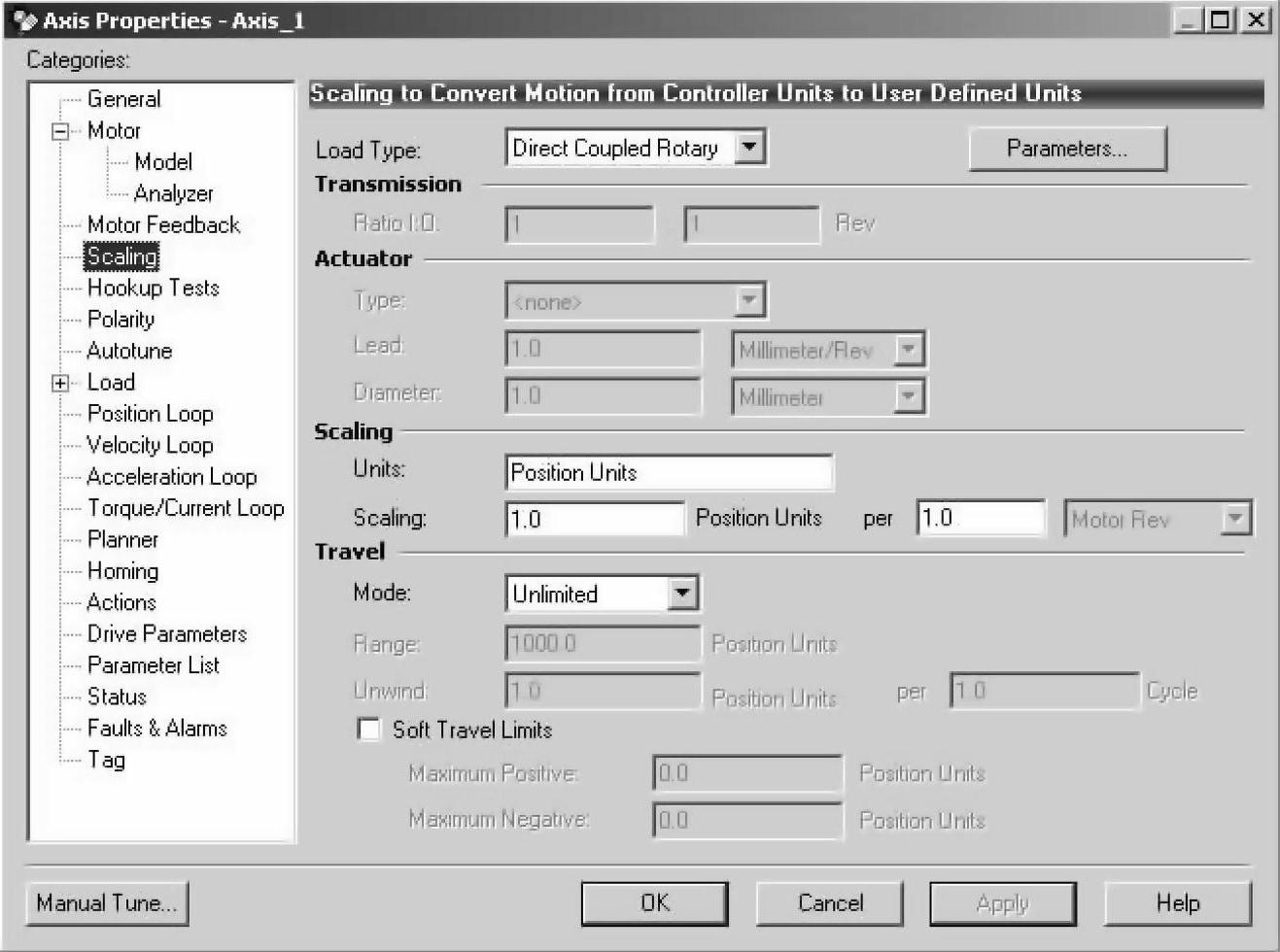
图6-91 运动轴的定标组态
说明:
●Load Type:负载类型,可选直接耦合(Direct Coupled)、旋转传输(Rotary Transmis-sion)和线性执行机构(Linear Actuator)。
●Transmission:当负载类型选择“Rotary Transmission”和“Linear Actuator”要进行的设定,键入每旋转一周I∶O的比率。
●Actuator:当负载类型选择“Linear Actuator”要进行的设定,选择执行机构的类型,螺杆(Screw)、传送带和带轮(Belt and Pulley)、链条和链齿(Chain and Sprocket)及摇杆(Rock and Pinion),设定线性距离或用于换算线性距离的直径。
●Scaling:电动机每旋转一周对应的位置单位。
●Travel:决定行程是否限位,以及行程的方式和范围。
—Mode:行程方式,可选Unlimited、Limited和Cyclic。
—Range:范围,行程方式选择Limited时的位置单位。
—Unwind:开卷,行程方式选择Cyclic时的每周对应的位置单元。
—Soft Travel Limits:行程方式选择Unlimited和Limited时定义软行程限位的正反方向的位置单元。
选中“Load”,展现电动机负载组态页面,进行电动机负载组态,如图6-92所示。
说明:
●Load Inertia/Mass:负载惯量/质量。
—Load Coupling:负载耦合选择刚性(Rigid)或柔性(Compliant)。
—Use Load Ratio:决定是否使用负载率,使用键入负载率和电动机惯量,不使用键入总惯量。
●Inertia/Mass Compensation:惯量/质量补偿。
—System Inertia:系统惯量,百分比比率。
—System Acceleration:系统加速度。
●Active Load Compensation:激活负载补偿。
—Torque Offset:转矩偏移量,百分比比率。
选中“Position Loop”,展现位置环组态页面,进行位置环参数组态,如图6-93所示。
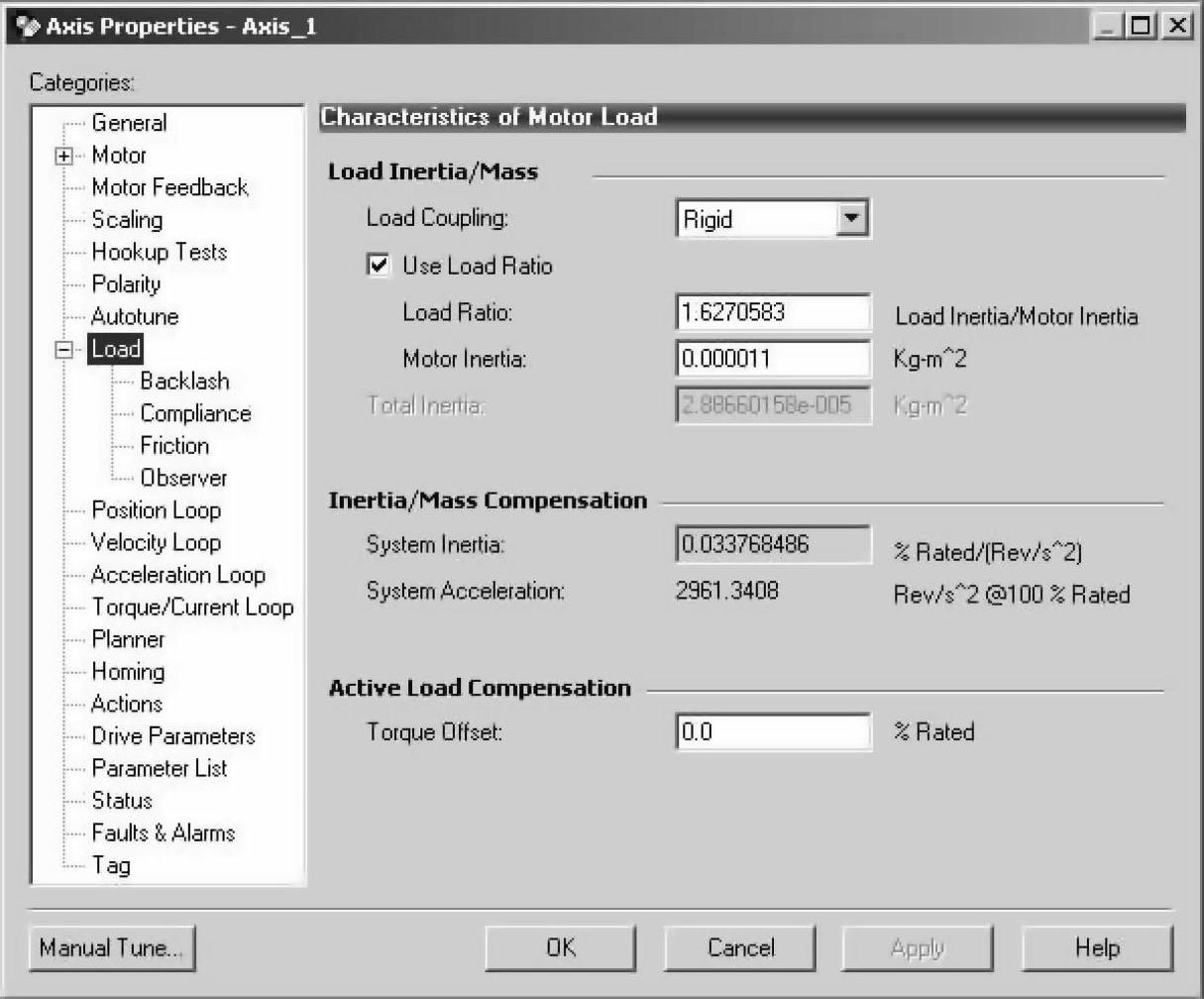
图6-92 电动机负载组态页面
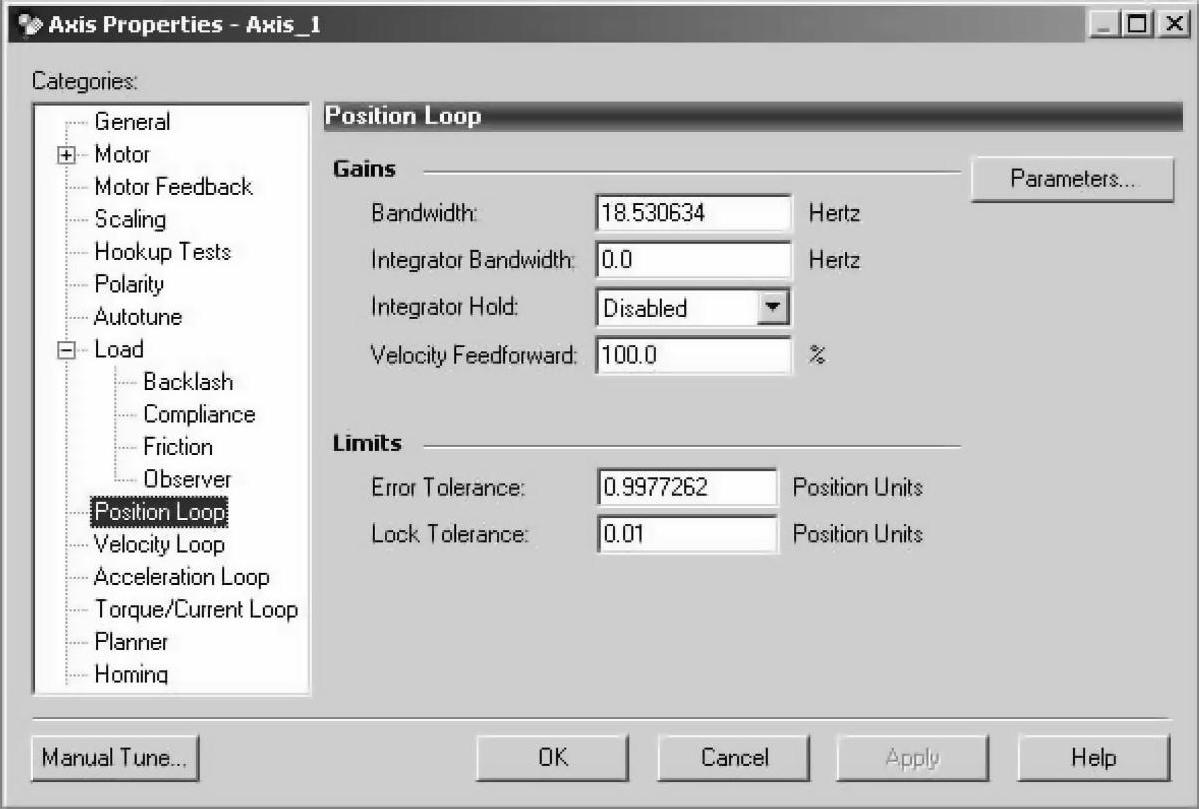
图6-93 位置环组态页面
说明:
●Gains:设定增益系数:
—Bandwidth:设定频带宽量值。
—Interator Bandwidth:过渡过程的频带宽量值。
—Interator Hold:选定使能或禁止位置过渡过程的状态。
—Velocity Feedforward:设定速度反馈参数。
●Limits:
—Error Tolerance:按位置单位设定误差量值。
—Lock Tolerance:按位置单位设定锁定位置公差量值。
选中“Action”,展现Action组态页面,进行Action组态,如图6-94所示。
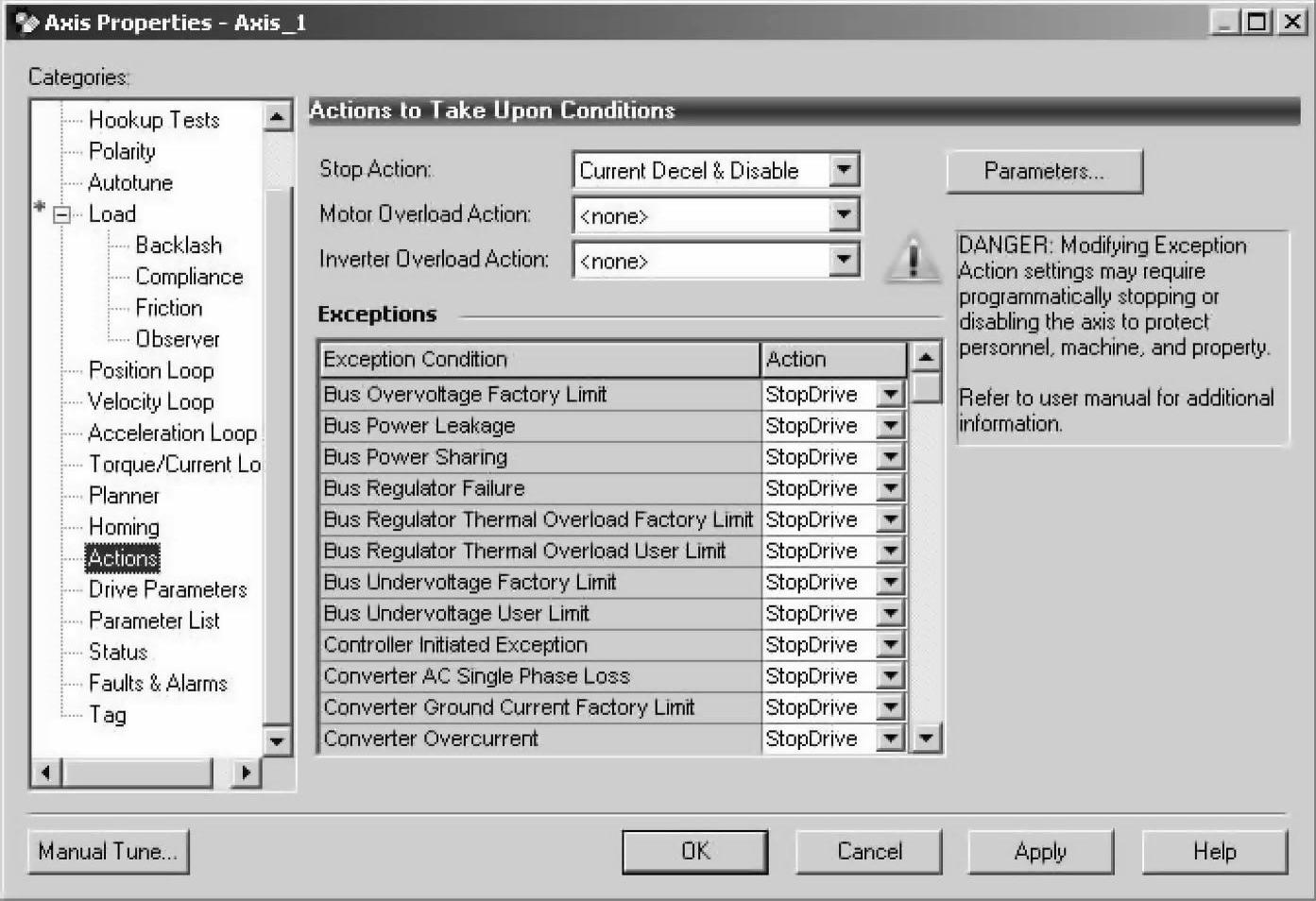
图6-94 Action组态页面
说明:
●Stop Action:停车时的动作。
—Disable&Coast:禁止或滑行。
—Current Decel&Disable:电流减速和禁止。
—Current Decel&Hold:电流减速和保持。
●Motor Overload Action:电动机超载时的动作。
—None:无。
—Current Foldback:电流交叠反馈。
●Inverter Overload Action:逆变器超载时的动作。
—None:无。
—Current Foldback:电流交叠反馈。
●Exceptions:根据非正常表现条件决定动作的列表,动作Action的选择有:
—Ignore:可忽略的,控制器忽略非正常条件完成动作,对于有些基本的规划运行非正常表现,忽略不是有利的选项。
—Alarm:报警,控制器的设置在运控报警状态字中分配了位,但不会影响运动轴的行为动作,就像忽略一样,如果非正常表现是驱动器基本的动作,报警不是有利的选项。当非正常表现设为报警,当非正常表现条件清除时,报警状态将脱离。
—Fault Status Only:仅故障状态,就像报警一样,故障状态仅指示控制器设置运控故障状态字中的一个位,但不会影响运动轴的行为动作。当然,不同于报警的是,一旦当非正常表现条件清除时,需要明确地故障复位,以清除故障。就像忽略和报警,如果非正常表现是驱动器的基本动作,仅故障状态将不是有利的选项。
—Stop Planner:停车规划,控制器的设置在运控故障状态字中分配了位,并指定运控规划按照组态的最大减速速率的规划运控执行控制停车。一旦当非正常表现条件清除时,需要明确地故障复位,以清除故障。如果非正常表现是驱动器的基本动作,停车规划将不是有利的选项。
—Stop Drive:停车,当非正常表现发生时,分配在故障状态自中的一个位被设置,运动轴将使用驱动器特定的非正常行为发生所定义的停车动作开始停车。这不是控制器指定停车动作的基本组态,停车动作是属于设备的。
—Shutdown:关闭,当非正常表现发生时,驱动器所属的电动机用驱动器定义的(如Stop Drive)停车动作停车,同时供电模块被禁止。需要一个明确的关闭复位去恢复驱动器的运行。
可以看出,以上非正常条件引起的动作的强度是递增的,从忽略不顾到强行关闭。
选中“Parameter List”,并选择“Parameter Group”的“Action”组,展现Action参数组态页面,进行Action参数组态,如图6-95所示。
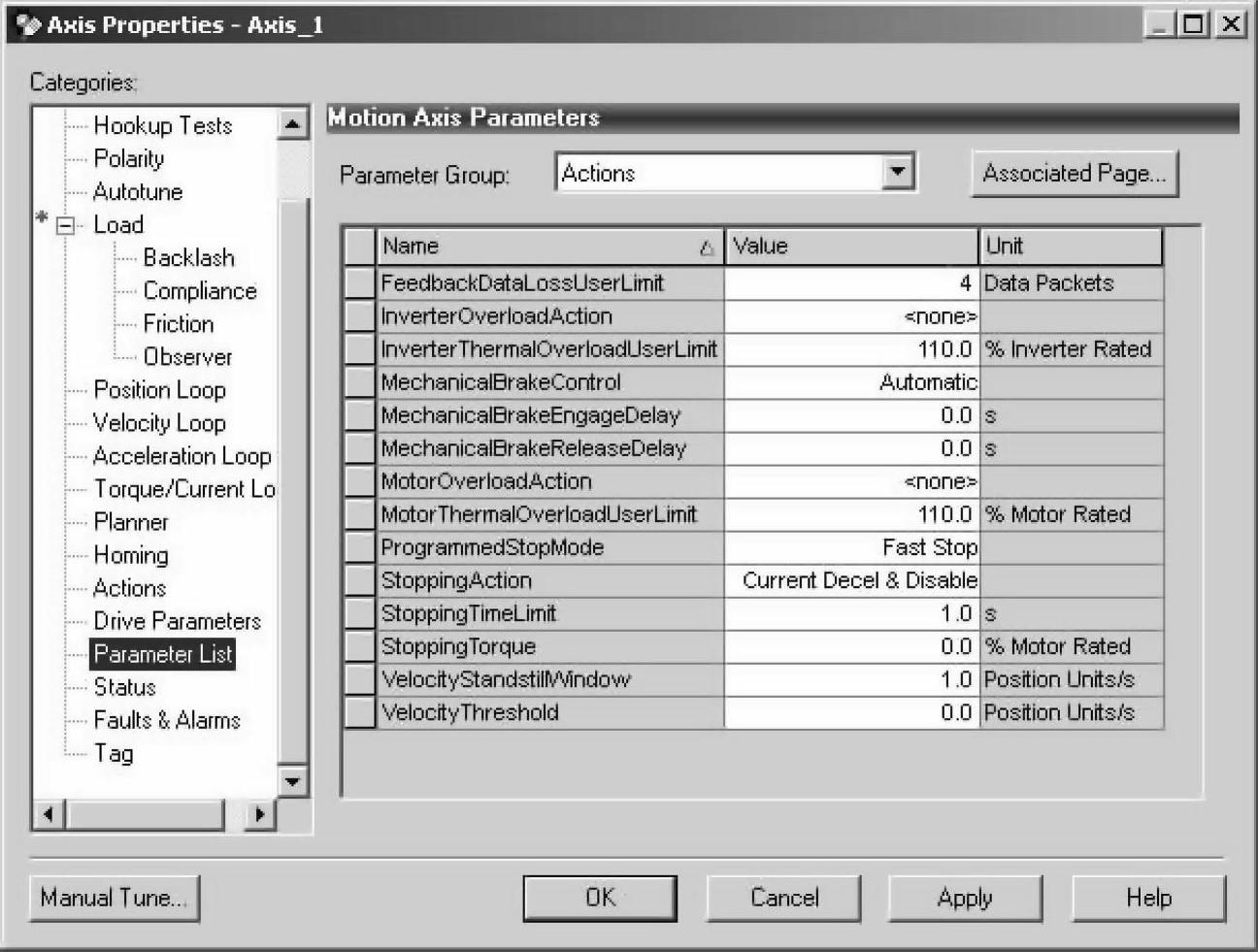
图6-95 Action参数组态页面
在这个页面上,查看或更改Action的设定,有些设定在其他页面也出现过。
为每一个位置控制的运动轴组态,重复以上的组态步骤。
2.组态反馈Only属性
现在讨论另外一种控制方式的组态:仅反馈组态。
在“Axis Configuration”下拉菜单,选择“Feedback Only”,组态仅有反馈,如图6-96所示。
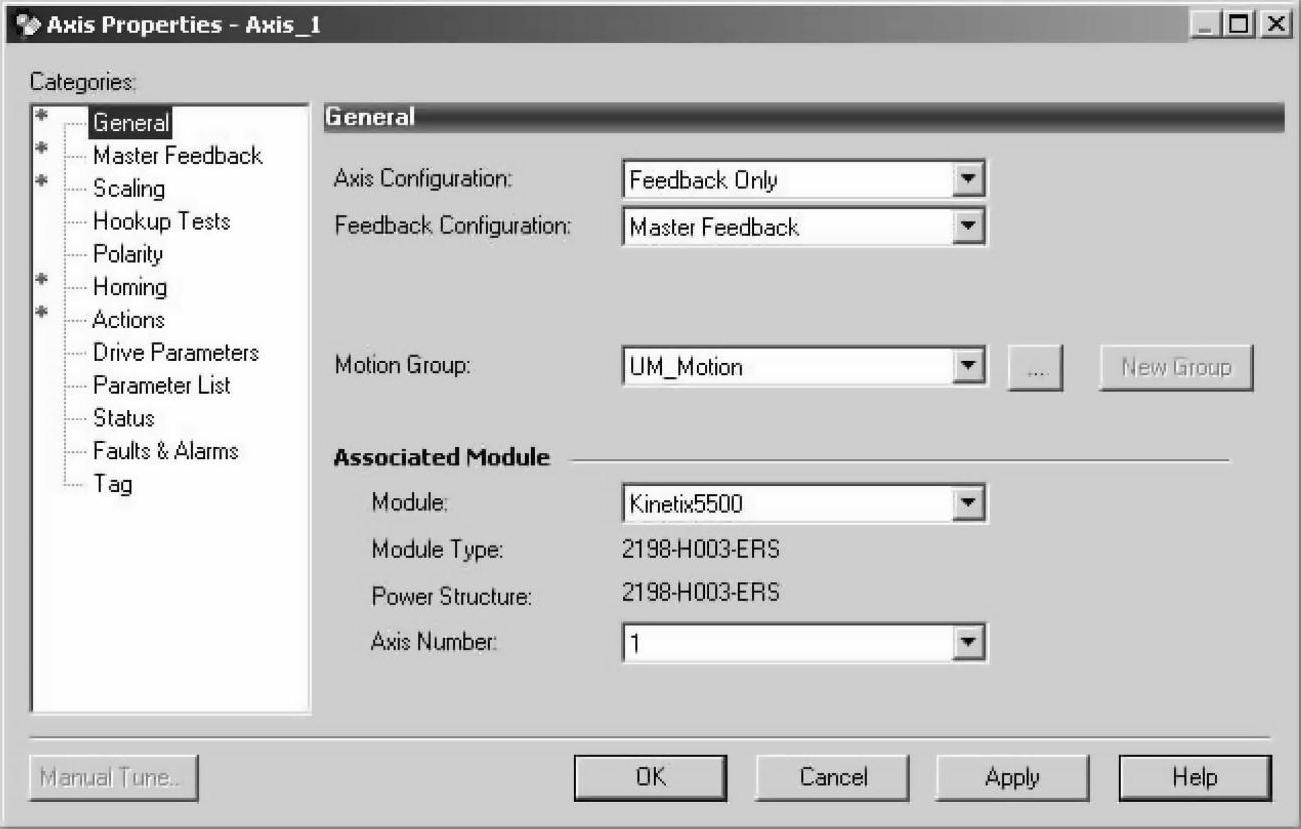
图6-96 仅反馈组态页面
说明:
●Axis Configuration:可选择Feedback Only,仅有反馈控制。典型地运用于没有驱动器和电动机,只有反馈设备的情况。当选择了这个组态,指定运动轴的驱动器组态的连接页面上,必须将驱动器模块屏蔽。
●Feedback Configuration:反馈组态,只能选Master Feedback,主反馈。
●Motion Group:选择运控组,只有UM_Motion可选。(www.daowen.com)
●Module:选择轴的伺服模块,指定控制器I/O组态下其中的一个伺服模块。
●Module Type:显示已被选定的驱动器模块。
●Power Structure:显示已被选定的驱动器模块。
●Axis Number:运动轴的编号,有效的编号是1、2、3和4。已被分配的将不再出现。
如果这个运动轴选中为仅有反馈的话,相应的伺服模块组态应该进行屏蔽,如图6-97所示。
选中“Master Feedback”,展现Master Feedback组态页面,进行Master Feedback Device Specification组态,如图6-98所示。
说明:
●Device Function:设备功能,已被指定为主反馈功能。
●Feedback Channel:反馈通道,已被指定为Feedback 1。
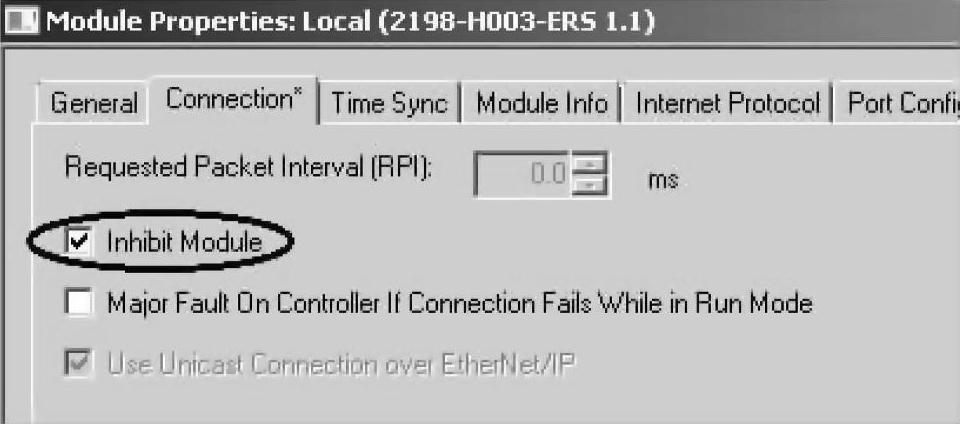
图6-97 仅有反馈的伺服模块要屏蔽
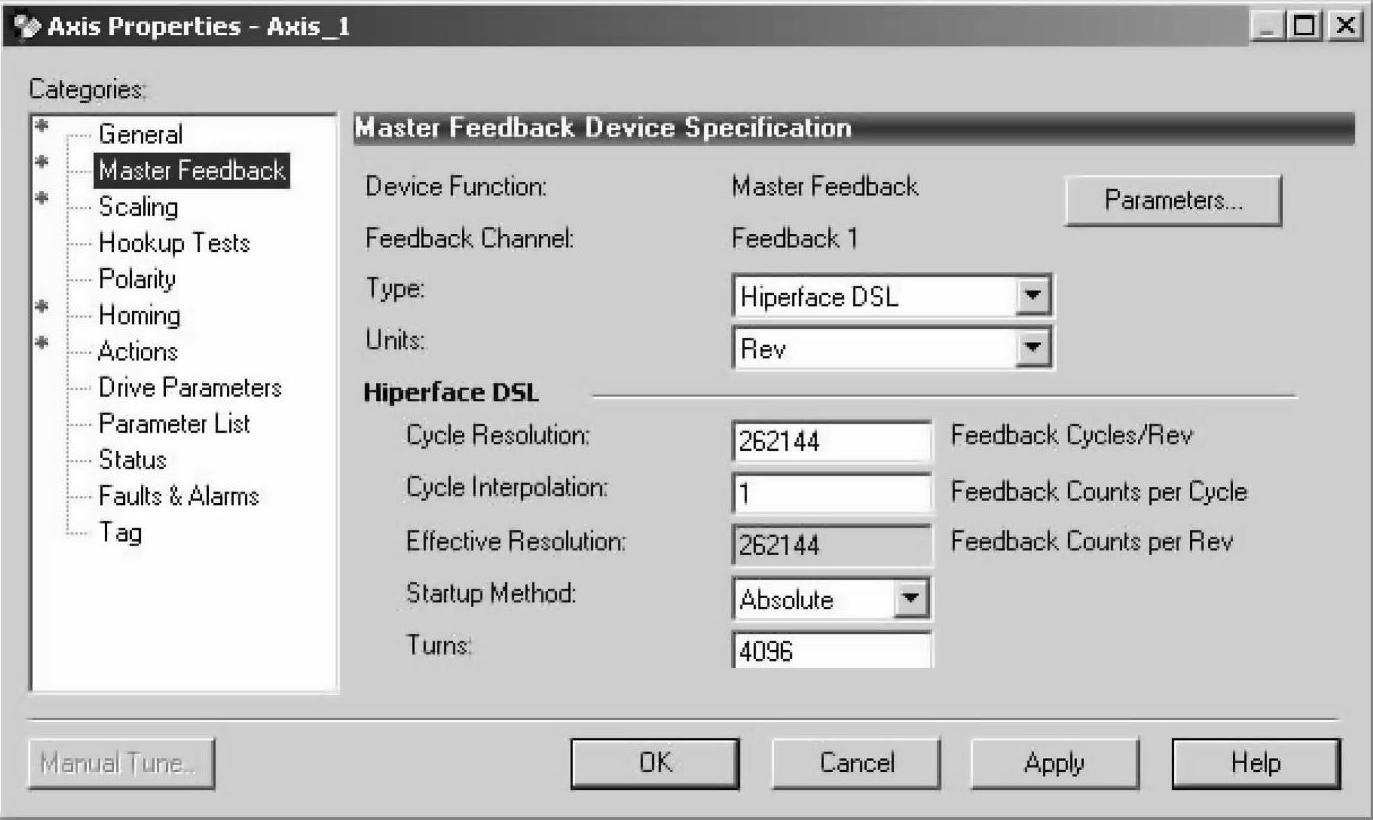
图6-98 主反馈设备设定页面
●Type:主反馈类型,选择Not Specified或Hiperface DSL。
●Unit:单位,选择每旋转一周。
●Hiperface DSL的设置:
—Cycle Resolution:反馈每旋转一周的分辨率。
—Cycle Interpolation:周插值,反馈每旋转一周的计数。
—Effective Resolution:预期的分辨率,反馈每旋转一周的计数。
—Startup Method:启动方式,可选绝对量(Absolute)或递增量(Incremental)。
—Turns:选择Absolute时,旋转电动机是圈数,线性电动机是长度。
为每个仅有反馈方式的运动轴,重复以上的组态步骤。
3.组态感应电动机轴属性
下面要讨论的是变频控制模式的组态。
在“Axis Configuration”下拉菜单,选择“Frequency Control”,组态频率控制,如图6-99所示。
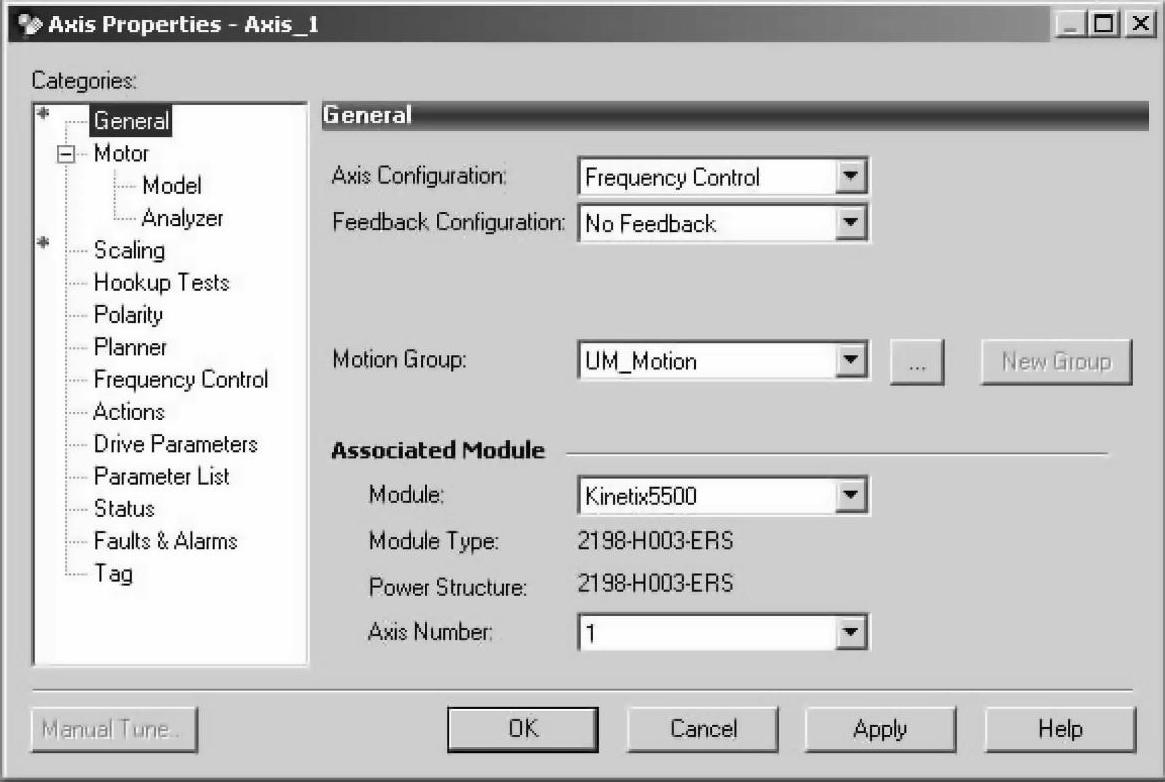
图6-99 频率控制组态页面
说明:
●Axis Configuration:选择频率控制。
●No Feedback:只能选择无反馈,因为频率控制是开环控制,不存在反馈。
●Motion Group:选择运控组,只有UM_Motion可选。
●Module:选择运动轴的伺服模块,指定控制器I/O组态下其中的一个伺服模块。
●Module Type:显示已被选定的驱动器模块。
●Power Structure:显示已被选定的驱动器模块。
●Axis Number:运动轴的编号,有效的编号是1、2、3和4。已被分配的将不再出现。
选中“Motor”,展现Motor组态页面,进行“Motor Device Specification”组态,如图6-100所示。
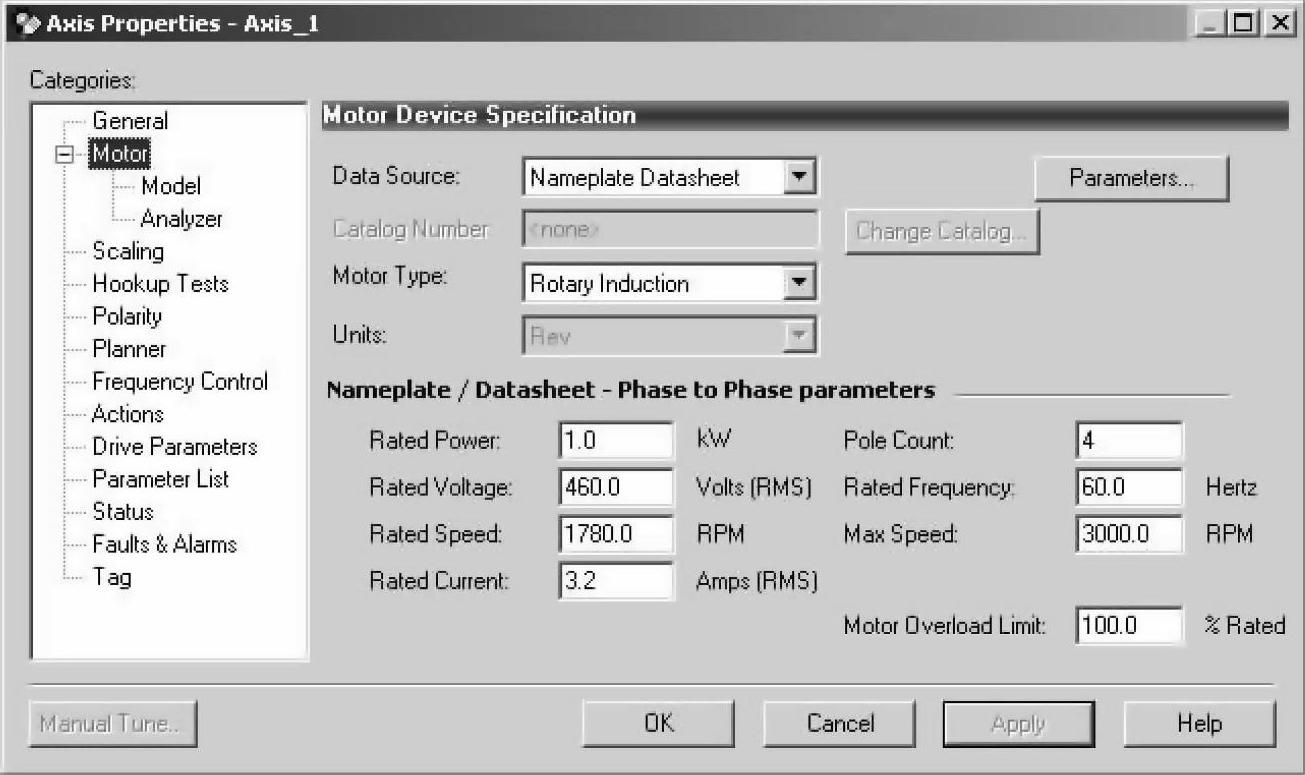
图6-100 电动机设备设定页面
说明:
●Data Source:选取铭牌数据库信息。
●Motor Type:选择电动机类型,此处选择旋转感应电动机。
●Units:单位为旋转。
●Nameplate/Datasheet-Phase to Phase parameters:从电动机铭牌上获得,显示已选定电
动机的相关信息。
选中“Frequency Control”,展现Frequency Control组态页面,进行变频控制组态,如图6-101所示。
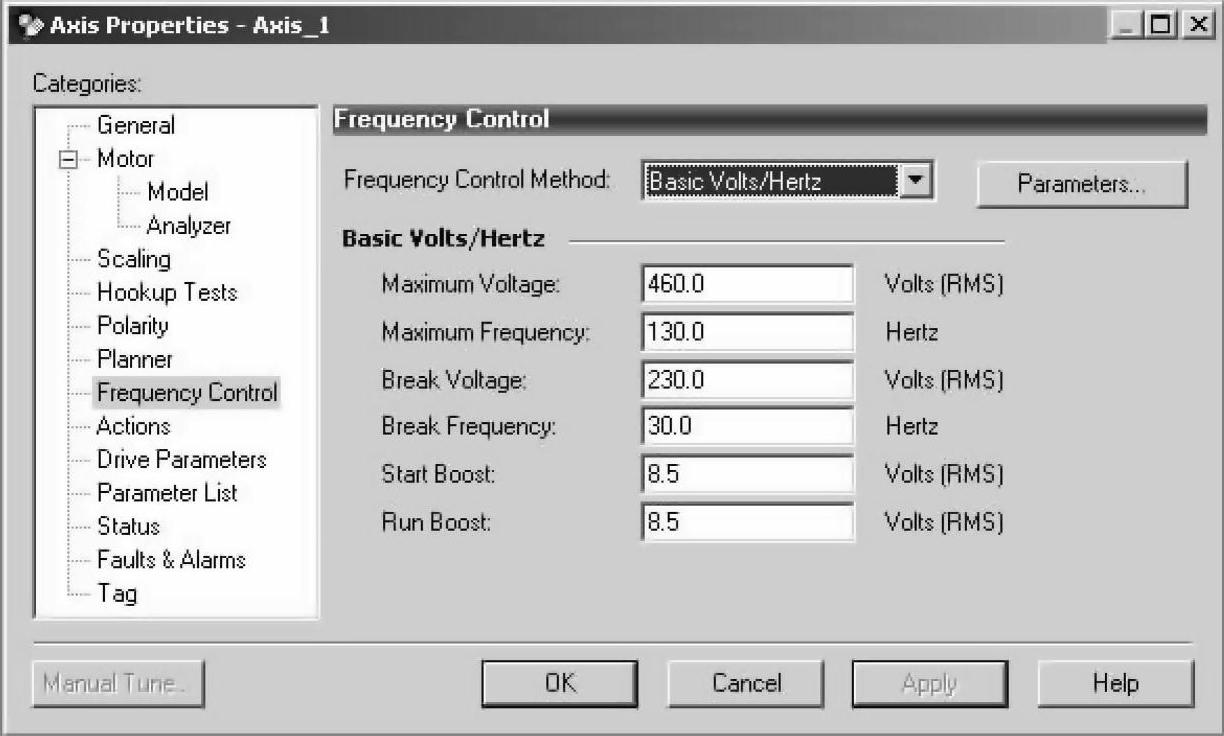
图6-101 变频控制组态页面
说明:
●Frequency Control Method:可选基本电压/频率方式,或是无感应矢量控制。
●Basic Volts/Hertz:设置基本电压/频率控制的相关参数。
—Maximum Voltage:最大电压,与最大频率构成基本电压/频率控制曲线在基本速度以上区域的斜率。
—Maximum Frequency:最大频率,与最大电压构成基本电压/频率控制曲线在基本速度以上区域的斜率。
—Break Voltage:中断电压,与中断频率构成基本电压/频率控制曲线较低区域的斜率。
—Break Frequency:中断频率,与中断电压构成基本电压/频率控制曲线较低区域的斜率。
—Start Boost:起动升压,设定值决定了从0速度和在低速重负荷的加速的断开方式。
—Run Boost:运行升压 设定值决定了低速下的附加运行转矩。
选中“Analyzer”,展现Analyzer Motor to Motor Model页面,分析电动机和测试电动机获得电动机模型,可进行动态电动机测试、静态电动机测试和计算模型。选择“Static Motor Test”,进行静态电动机测试,如图6-102所示。
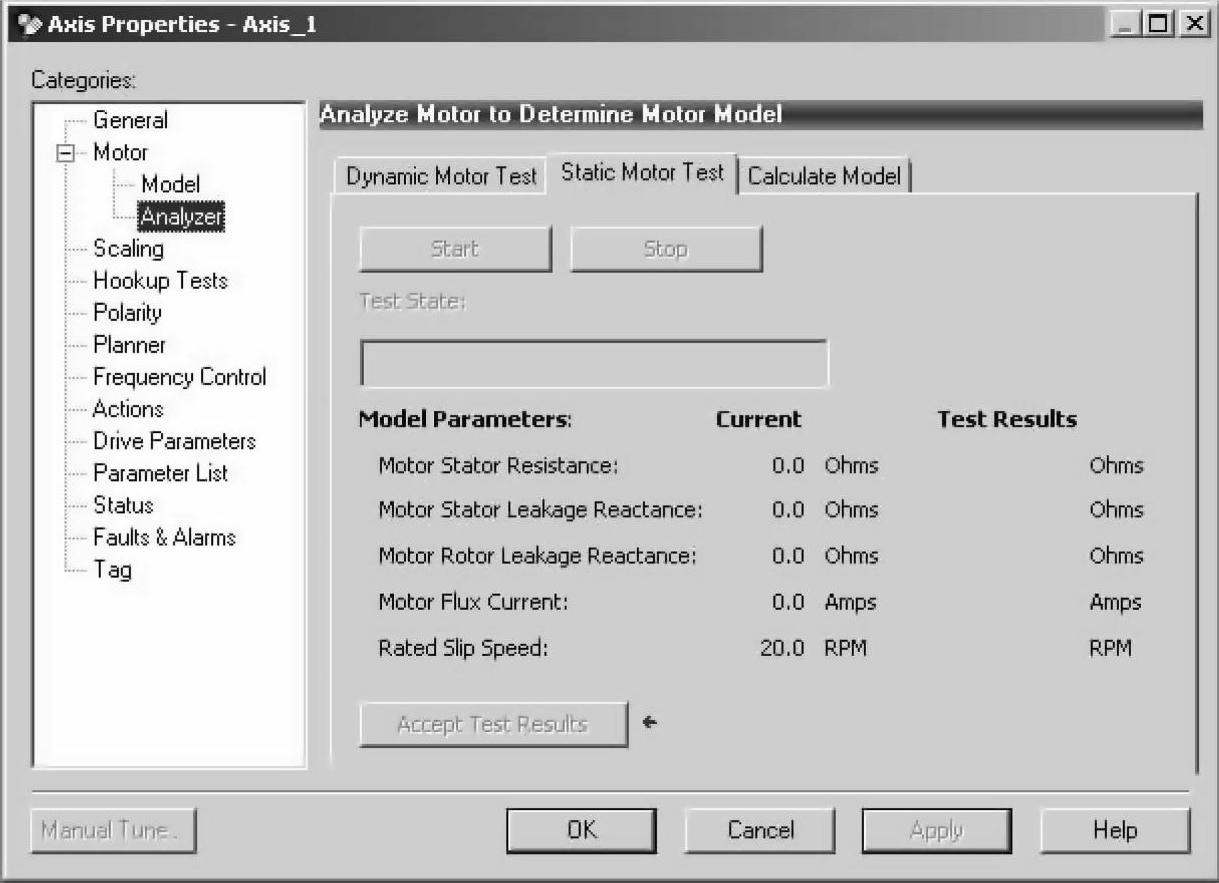
图6-102 静态电动机测试页面
单击“Start”,开始运行测试,并测量电动机定子阻抗。如果选择了基本电压/频率类别,则可跳过此步。
选中“Drive Parameters”,展现Drive Parameters组态页面,进行驱动器参数读写组态,如图6-103所示。
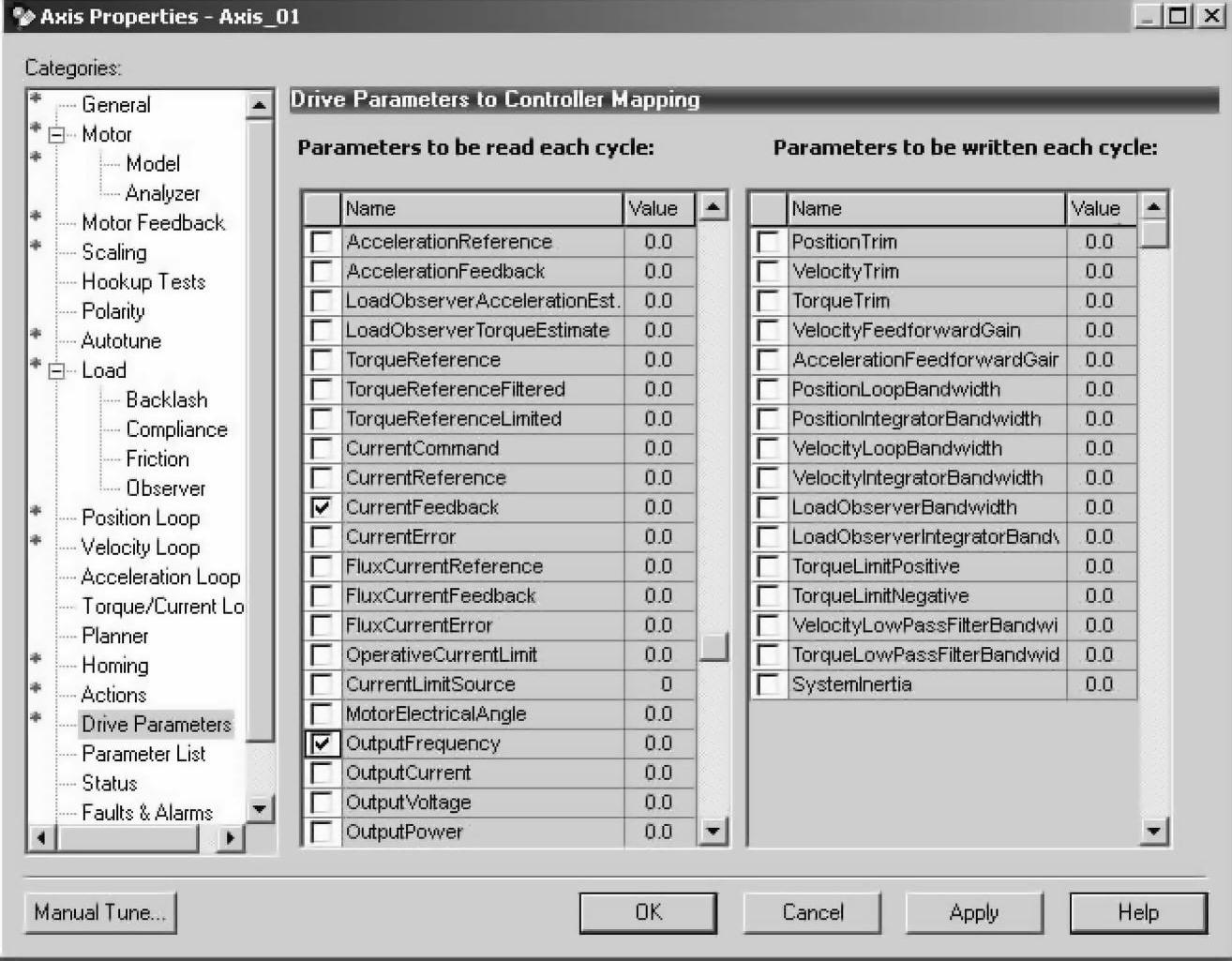
图6-103 驱动器参数读写页面
除了自动标签更新(Auto Tag Update)启用是必包含的参数外,还可以在这个页面勾选其他读取或写入的参数。目前每个运动轴的勾选读取参数不能超过10个,勾选写入的参数不能超过10个。
选择周期读取/写入的每个参数,都会增加控制器和驱动器之间通信的消耗,会影响到系统性能,应当权衡利弊来决定勾选读写参数。
选中“Motion Axis Parameters”,展现Motion Axis Parameters组态页面,进行运控轴参数组态,如图6-104所示。
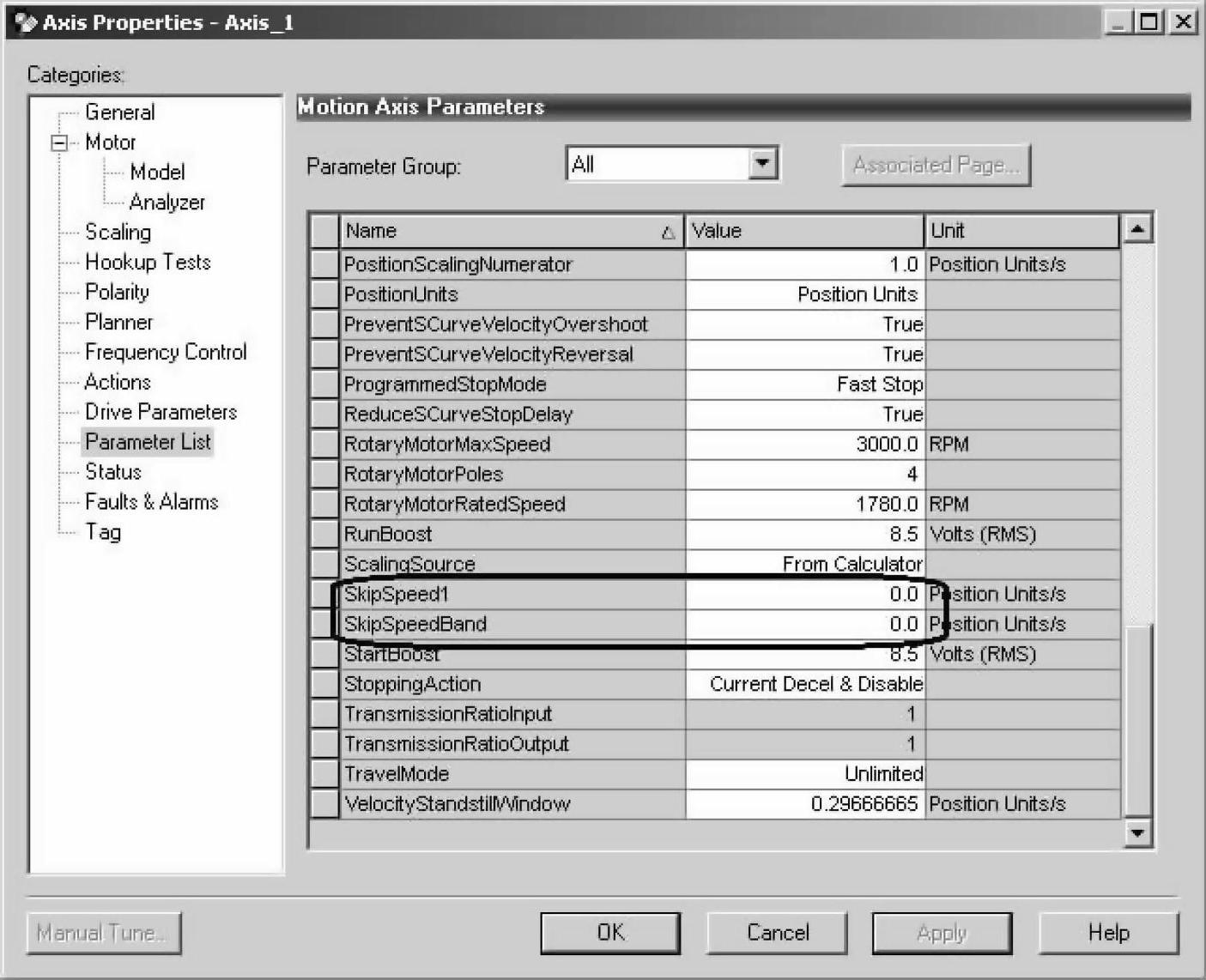
图6-104 运控轴参数设定页面
此页显示了运控所有的参数,非常的多,挑选两个曾经讨论过的,有关频率谐振的参数进行设定。
设定参数“SkipSpeed1”和“SkipSpeedBand”,决定避开谐振频率的中心点和范围的参数。
完成运动控制基本的组态之后,将含有运动控制有关组态信息的控制器项目,下载到控制器,可在线查看和组态其他的参数。以位置控制为例。
选中“Status”,展现Motion Status查看页面,查看运控状态,如图6-105所示。
说明:
●Axis State:显示运动轴的状态。
—Command Position:显示命令位置。
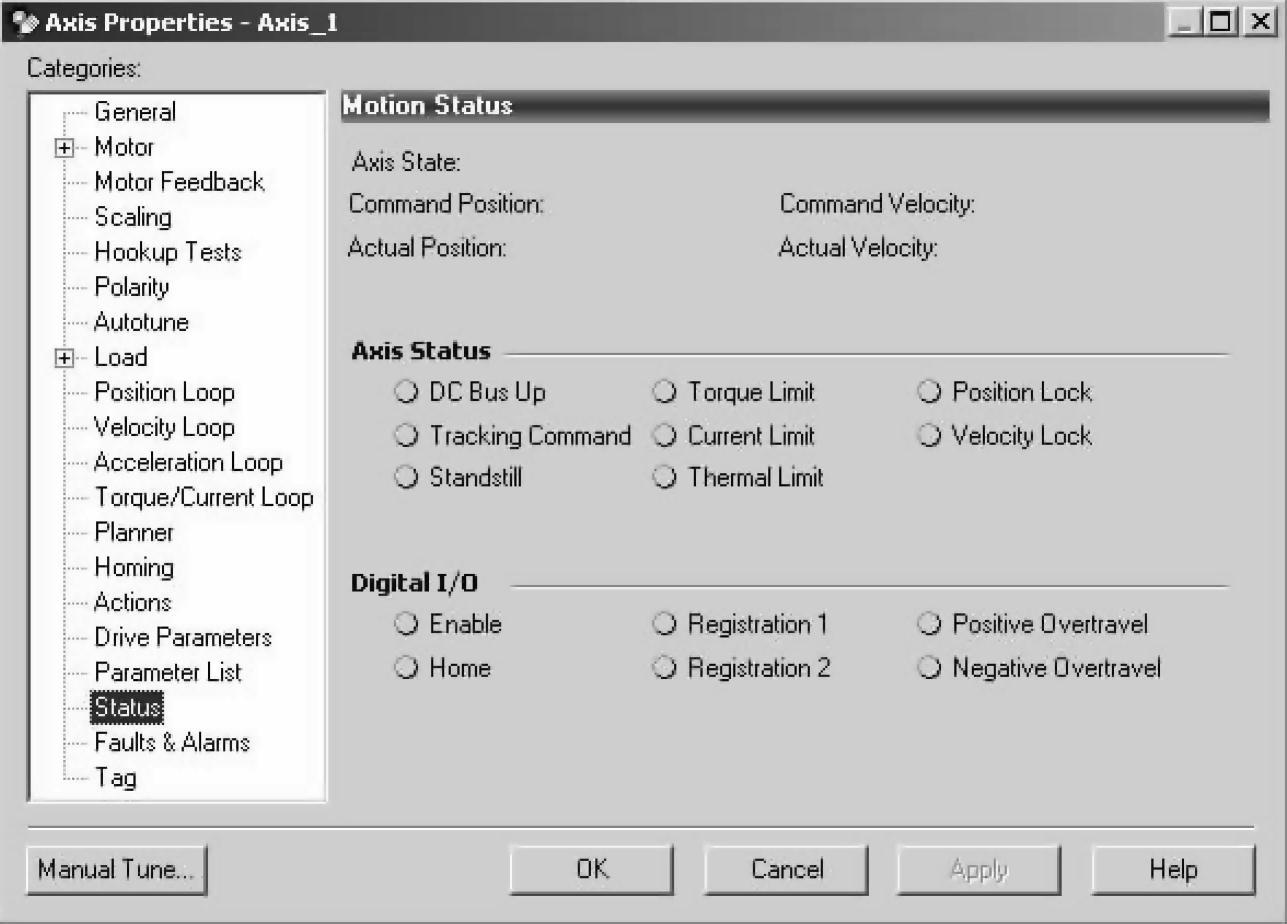
图6-105 运控状态监视页面
—Actual Position:显示实际位置。
—Command Velocity:显示命令速度。
—Actual Velocity:显示实际速度。
●Axis Status:显示运动轴的状况,处在状况时指示圆点绿色激活。
—DC Bus Up:交流母线超出。
—Tracking Command:跟踪命令。
—Standstill:停滞。
—Torque Limit:转矩超限。
—Current Limit:电流超限。
—Thermal Limit:温度超限。
—Position Lock:位置锁定。
—Velocity Lock:速度锁定。
●Digital I/O:离散量输入状态。
—Enable:使能。
—Home:机器归零。
—Registration1:注册点参考点1探测。
—Registration2:注册点参考点2探测。
—Positive Overtravel:正向超行程。
—Negative Overtravel:反向超行程。
选中“Faults&Alarm”,展现Faults and Alarms Log查看页面,如图6-106所示。
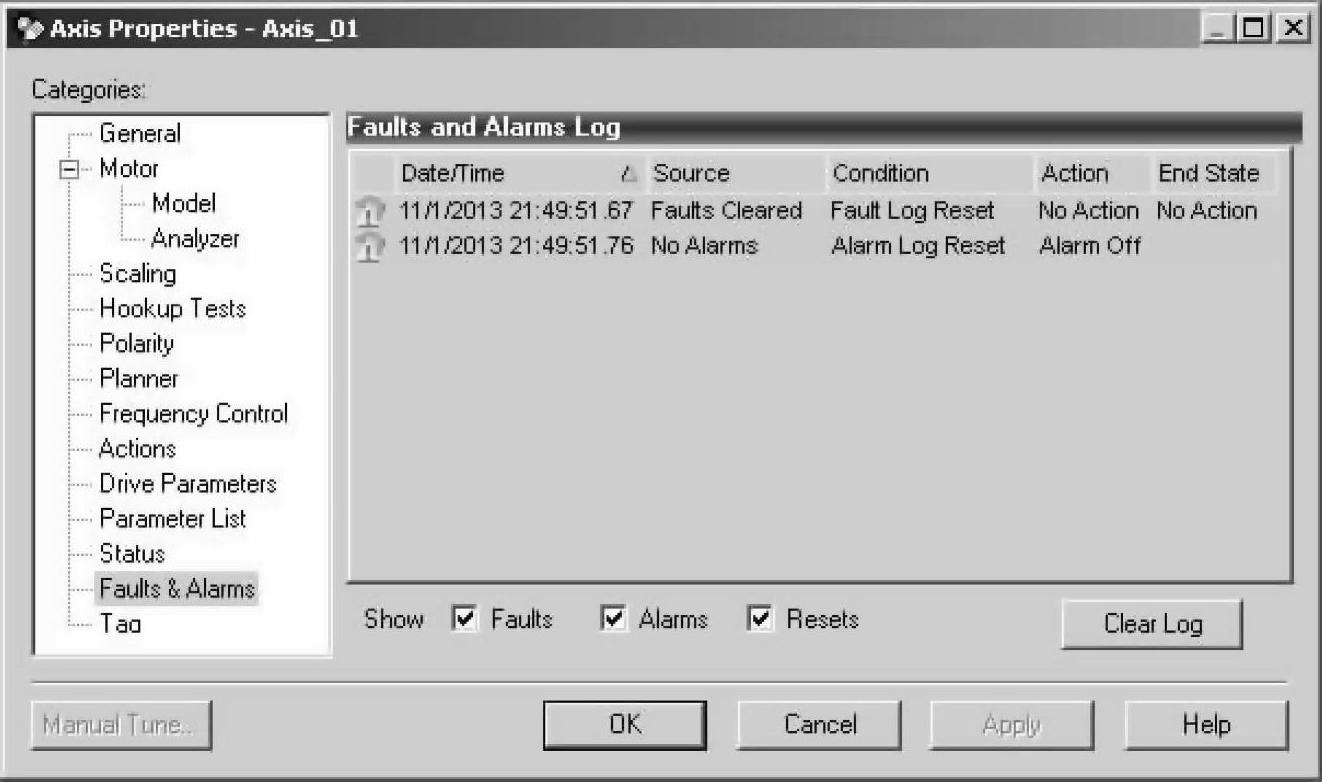
图6-106 运动轴故障、报警信息
说明:
●可勾选显示故障、报警和复位信息。只显示最新的25条故障和报警信息。
●单击 ,可清除记录。本页为只读信息。
,可清除记录。本页为只读信息。
●本页面所显示的信息,在运动轴标签数据中也会出现,可用来编程或在人机界面上显示。
选中“Tag”,展现Axis Tag Properties的运动轴标签查看页面,如图6-107所示。
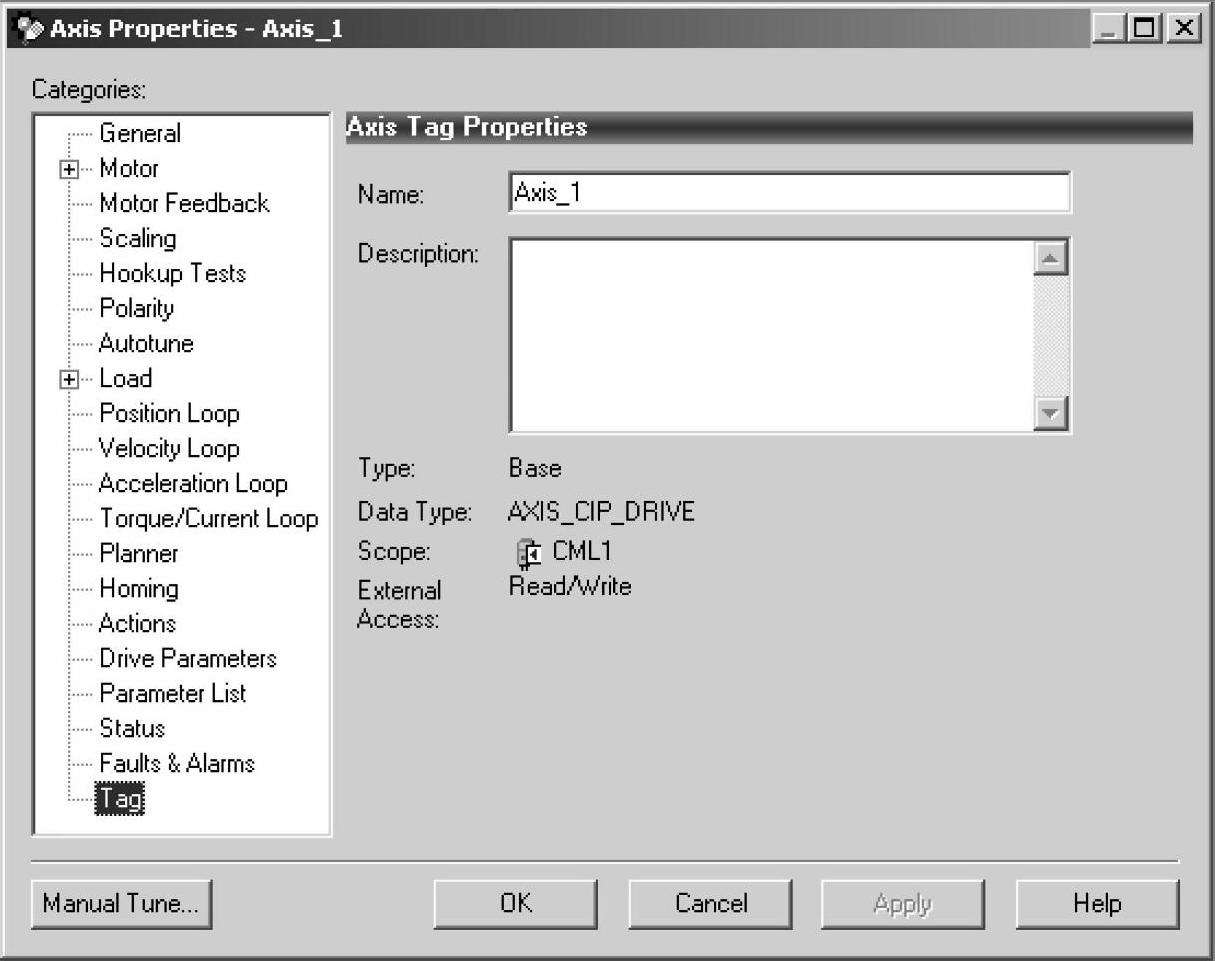
图6-107 运动轴标签查看页面
本页面显示运动轴标签的名称、数据类型和所处的数据区域。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




