在控制器项目中要做的是:
●在Logix控制器项目中增加Kinetix 5500驱动器模块。
●在控制器项目中组态运控组。
●对每一个轴的属性进行组态。
●Kinetix 5500驱动器的上电检测。
●分别对每个轴进行轴测试和自整定轴。
在离线的控制器项目或在线的编程状态下的控制器中可以完成如下组态。
在控制器属性中打开日期和时间的设定页面,如图6-62所示。
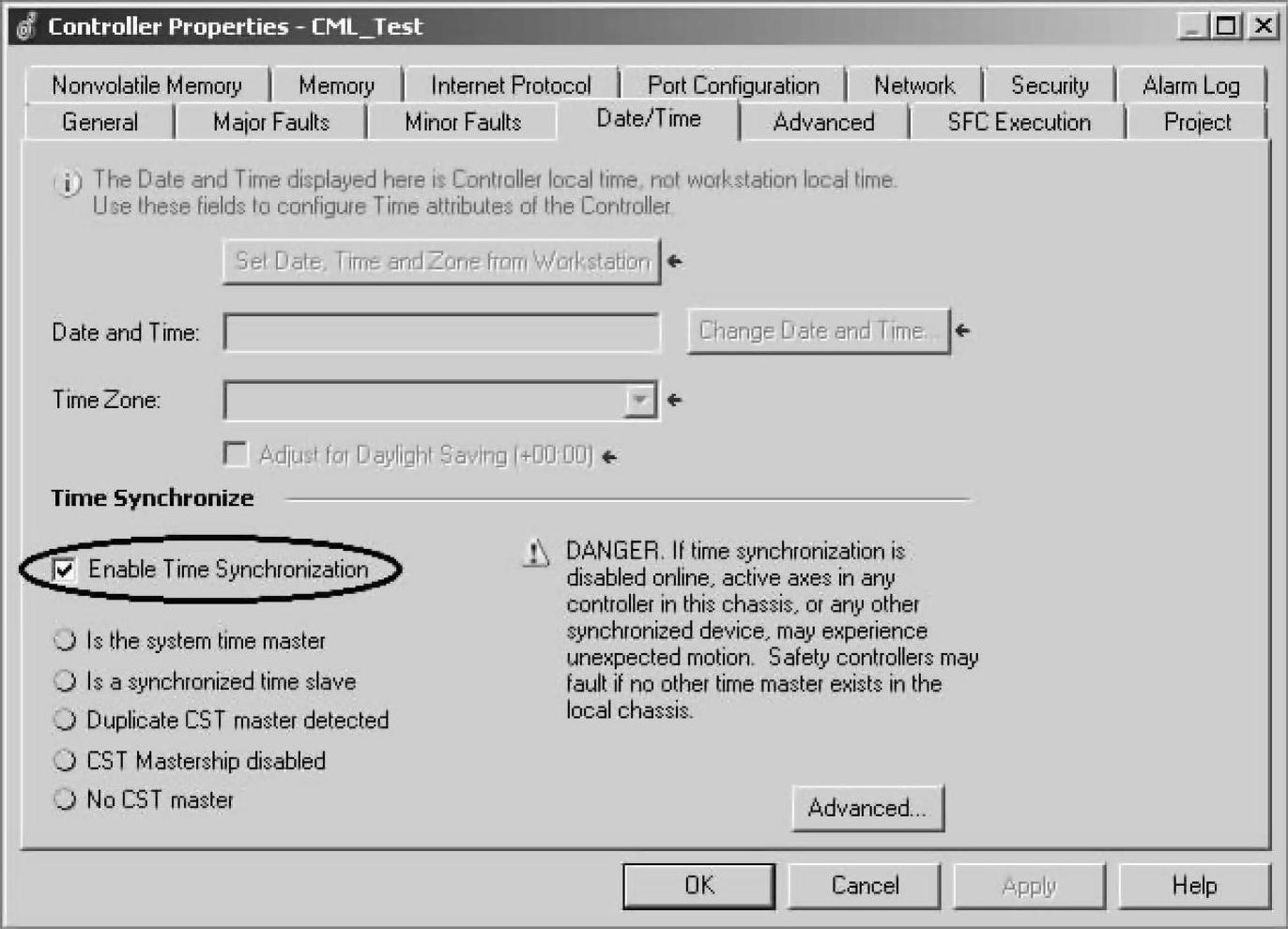
图6-62 控制器属性日期和时钟设定
控制器项目中只要含有运动控制,此页属性的时间同步一定要使能。这意味着让控制器参与了EtherNet/IP网络上的时间同步,控制器容易成为主时钟设备Grandmaster,运控模块将按照Grandmaster模块设定它们的时钟,实行时间同步。
CIP运动控制将执行的数据和时间戳作为标准的以太网数据包的一部分,允许运动控制设备执行预先确定的规划并遵循定位路径信息。为使CIP运动控制正常,控制器、通信模块和运动控制设备都需要时间同步。
EtherNet/IP网络上提供的时间同步的机制称为CIP Sync,CIP Sync基于IEEE-1588精密时间协议(PTP)标准,这个标准详细说明了网络中所连接的设备的同步时间。
在同一个CIP Sync网络中,为所有参与CIP Sync的控制器设定时间同步使能,整个CIP Sync网络会自动地晋升出一个Grandmaster,除非在高级组态中设置了优先权,在高级组态中可决定EtherNet/IP网络中主时间设备的优先权。
单击 ,进入时钟同步的高级组态,如图6-63所示。
,进入时钟同步的高级组态,如图6-63所示。
说明:
●Grandmaster Clock:作为主时钟设备的相关信息,在线时将显示。
●Local Clock:本地时钟的信息,在线时将显示,应留意作为主时钟设备晋升的优先权
设定,默认为128。
在控制器项目树形结构中,选中“Ethernet”右击,选中“New Module…”,如图6-64所示。
单击“New Module…”后进入模块选择页面,取消所有模块选择的勾选,然后仅勾选“Drive”,展现的是所有驱动器模块的选择,如图6-65所示。
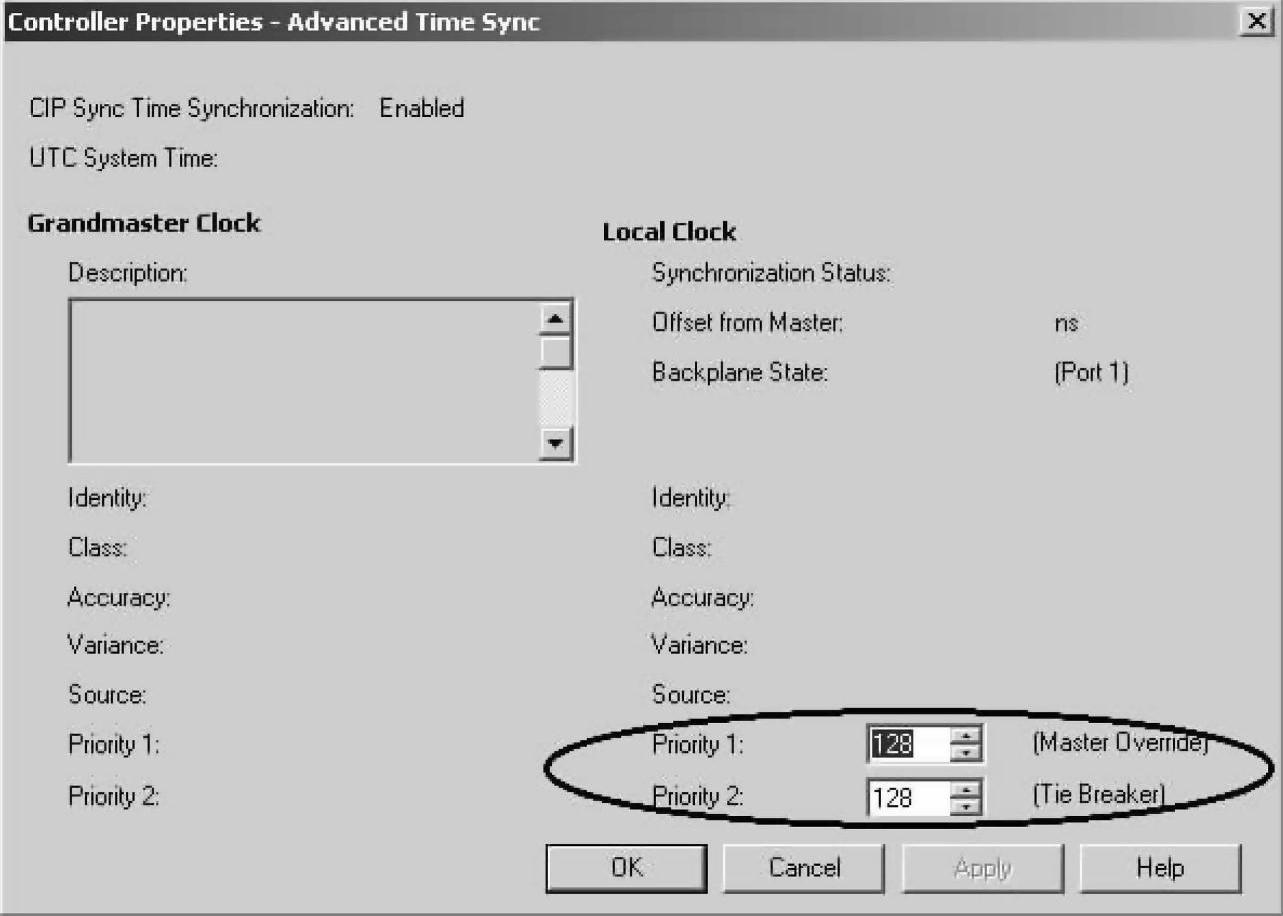
图6-63 时钟同步高级组态
双击选中模块或单击 ,创建Kinetix 5500驱动器模块,如图6-66所示。
,创建Kinetix 5500驱动器模块,如图6-66所示。
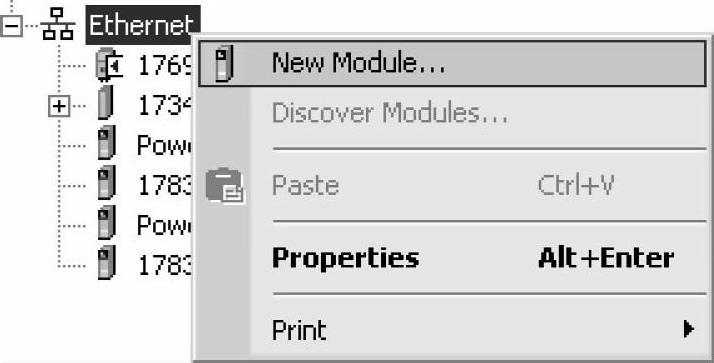
图6-64 创建新模块
说明:
●Name:键入驱动器模块的命名。
●Description:键入驱动器模块的说明。
●Ethernet Address:键入模块的IP地址,这是控制器通过EtherNt/IP网络访问模块的IP地址。
●Module Definition:模块定义,单击 进入模块定义修改,如图6-67所示。
进入模块定义修改,如图6-67所示。
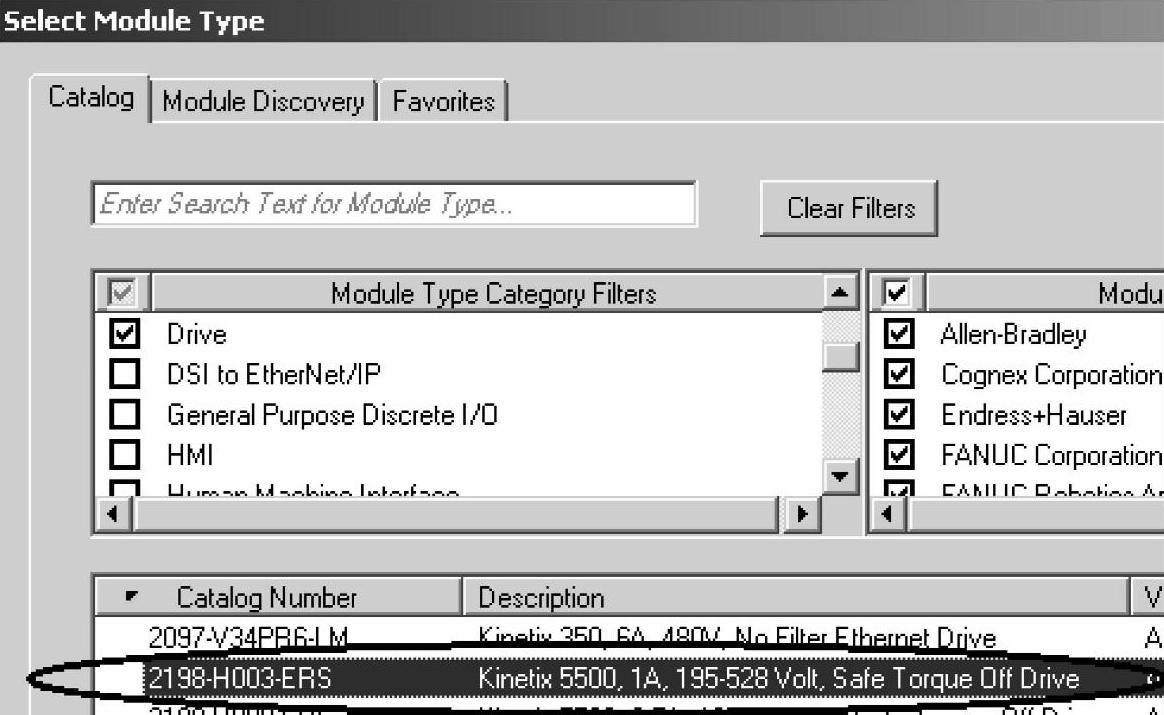
图6-65 模块选择页面
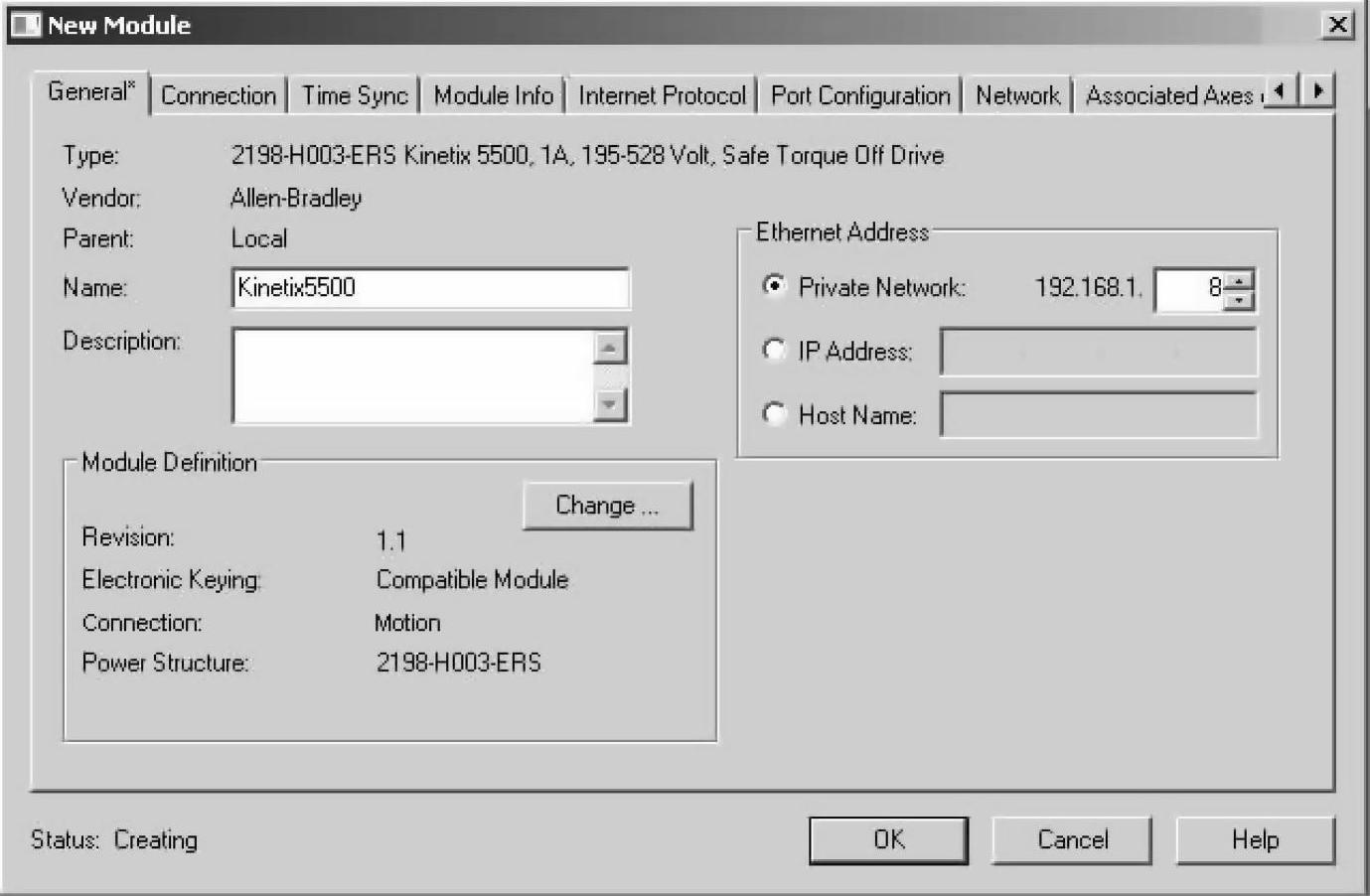
图6-66 创建Kinetix 5500驱动器模块
说明:
●Revision:模块固件版本,主要版本和次要版本,此处主要版本为1,次要版本为1。
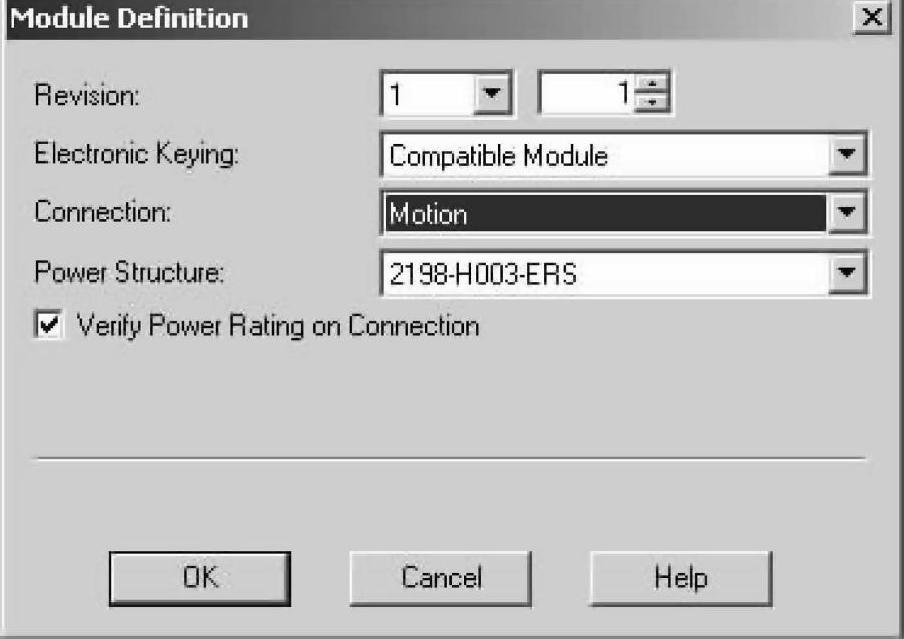
图6-67 修改模块定义
●Electronic Keying:电子识别模式,组态模块和在线模块的辨识,确定接受或拒绝与控制器建立通信,有如下选择:
—Exact Match:精确匹配模式,模块性能完全吻合,要求组态模块与在线模块的制造商、产品类型、产品目录号、主要版本和次要版本完全一致。
—Compatible Module:兼容模式,具有模块性能兼容性,要求组态模块与在线模块的制造商、产品类型、产品目录号、主要版本一致,组态模块次要版本低于在线模块次要版本,推荐使用的模式,并建议选用较低次要版本。—Disable Keying任意模式,不考虑模块的性能,但考虑数据的尺寸和形式,组态模块与在线模块的制造商、产品类型、产品目录号要非常接近,具有不可预测的风险,一般不建议使用。
●Connection:连接运控类型的数据。(https://www.daowen.com)
●Power Structure:供电的驱动器模块目录号指定了供电的类型。
●Verify Power Rating on Connection:勾选决定连接时要核实供电额定功率。
单击 ,返回常规页面。
,返回常规页面。
在常规页面,单击 ,完成创建,I/O组态下出现新的运控设备,如图6-68所示。
,完成创建,I/O组态下出现新的运控设备,如图6-68所示。
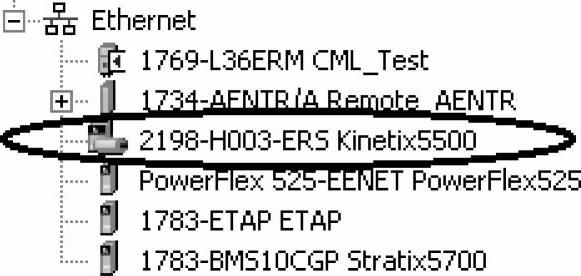
图6-68 已创建的Kinetix 5500
双击“2198-H003-ERS Kinetix 5500”,进入伺服驱动模块的组态,单击“Associated Axes”,进入分配轴的组态页面,如图6-69所示。
在本页,要分配一个轴标签给这个驱动模块,轴标签用来存放该驱动模块连接轴的所有信息,可以在数据库创建数据类型结构为AXIS_CIP_DRIVE的数据标签,也可以在此页创建一个新标签,数据类型将会自动选择。
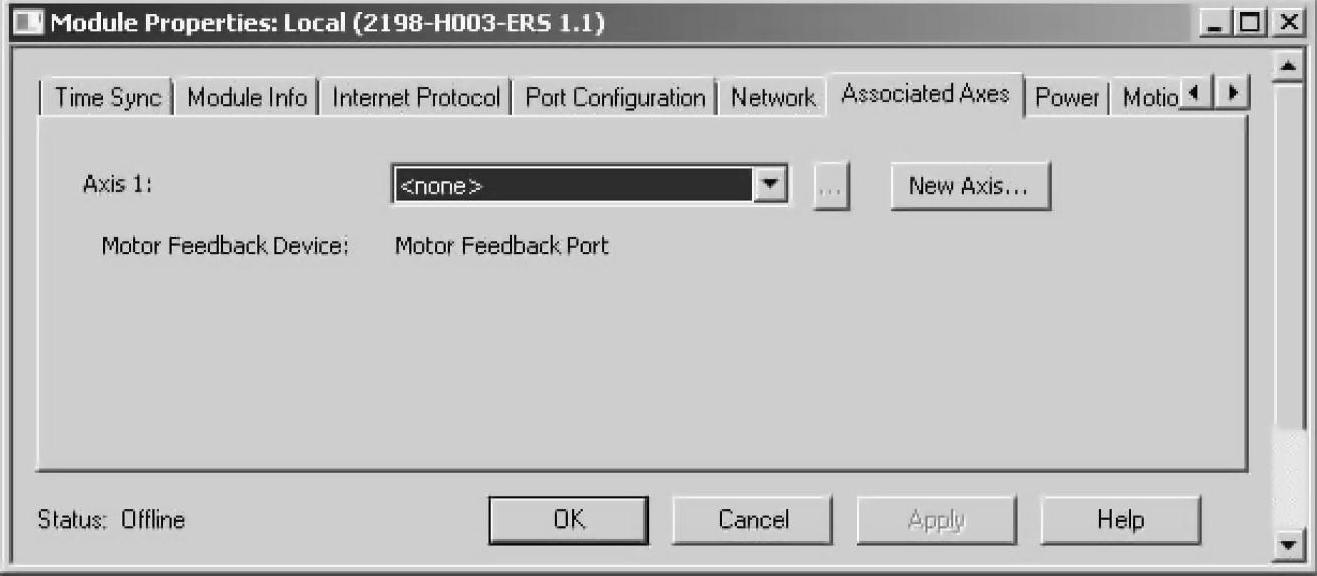
图6-69 分配轴的组态页面
单击 ,弹出创建轴结构标签的页面,如图6-70所示。
,弹出创建轴结构标签的页面,如图6-70所示。
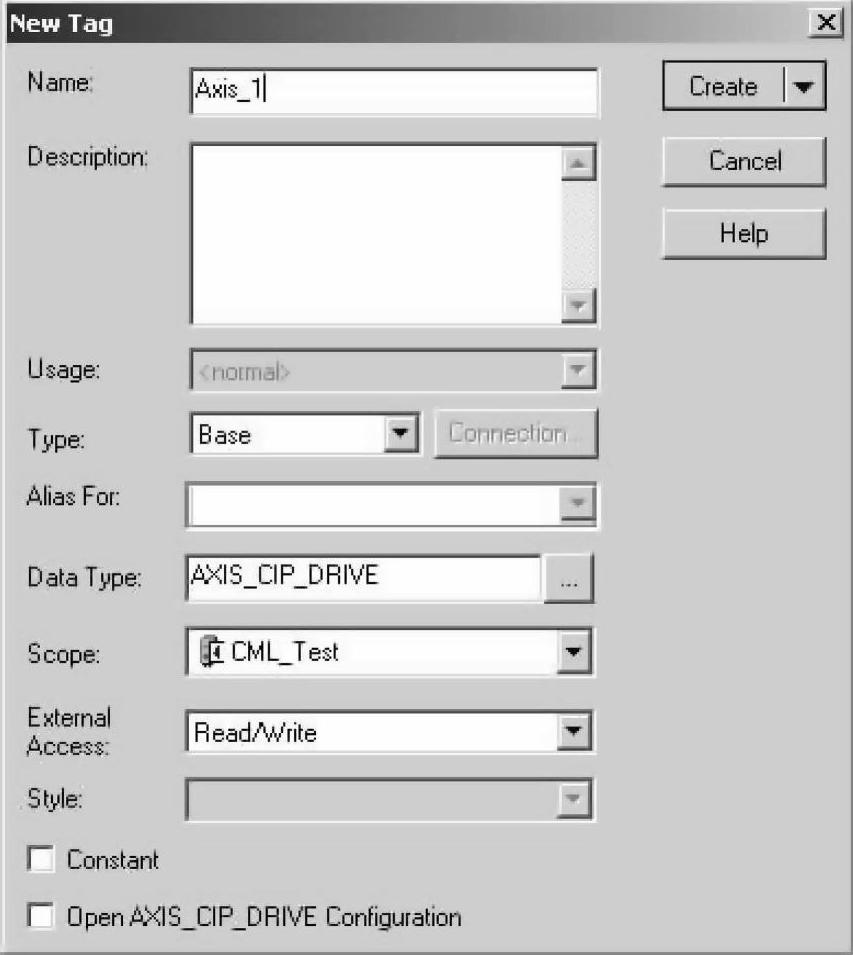
图6-70 创建轴结构标签页面
命名新的轴标签,系统自动选择了数据结构为AXIS_CIP_DRIVE的标签,单击 ,完成创建。名为Axis_1的结构数据标签被分配,如图6-71所示。
,完成创建。名为Axis_1的结构数据标签被分配,如图6-71所示。
这个命名为Axis_1的轴,将出现在运控组的Ungroup Axes之下,并被分配给Axis 1。
单击“Power”,进入供电组态页面,如图6-72所示。
说明:
●Power Structure:显示供电驱动模块的产品目录号。
●Voltage:选择供电电源等级,200~240V相电压,或400~480V线电压。
●AC Input phasing:交流输入相数选择,单相电源或三相电源。单相Kinetix 5500驱动限于2198-H003-ERS、2198-H008-ERS和2198-H015-ERS。
●Bus Configuration:母线组态,可选择独立、共享交流/直流或共享直流。
—Standalone:提供给单轴驱动和具有共享交流输入组态的驱动器,单相供电只能是此选项。
—Shared AC/DC:提供给具有共享交流/直流和共享交流/直流混合输入组态的逆变器驱动器。
—Shared DC:提供给具有共享直流输入(公共母线)组态的逆变器驱动器。
●Bus Sharing Group:母线共享组号的指定,独立母线组态无需指定共享组号。
—Standalone:提供给独立母线组态。
—Group1-Group25:提供给任何母线共享组态。
●Bus Regulator Action:选择母线调节器作用,禁止或使能并励调节器。
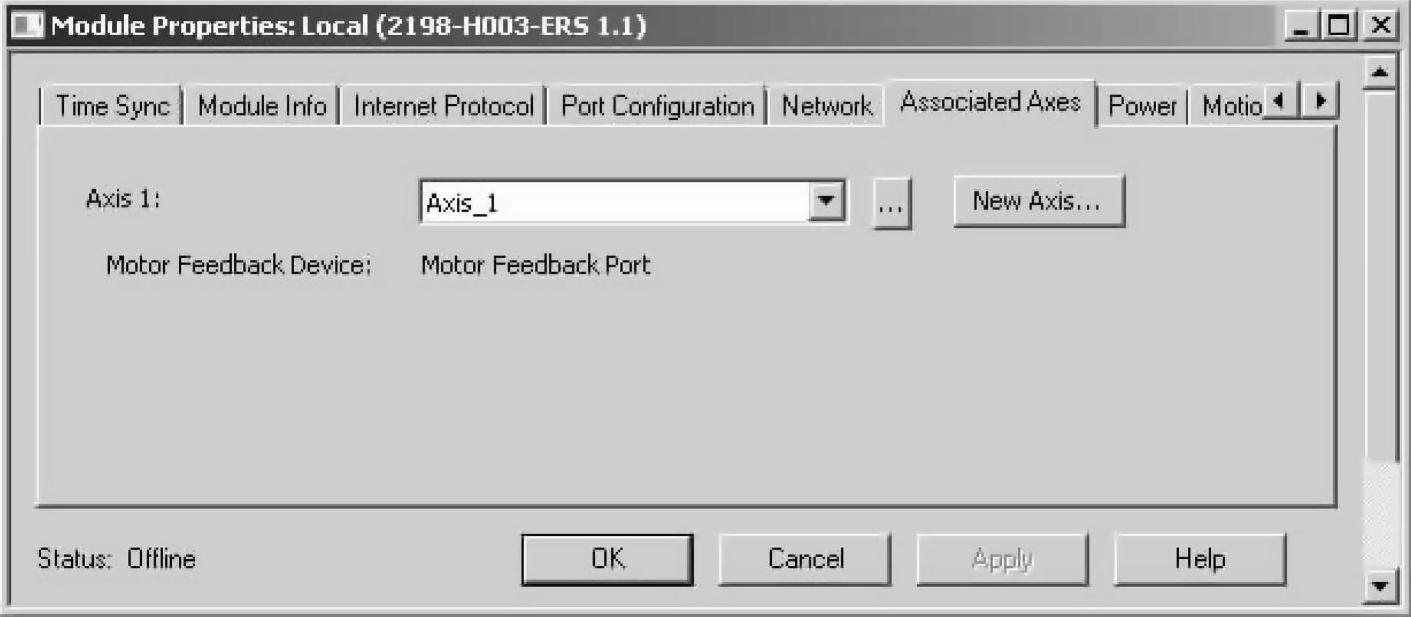
图6-71 已分配轴结构标签
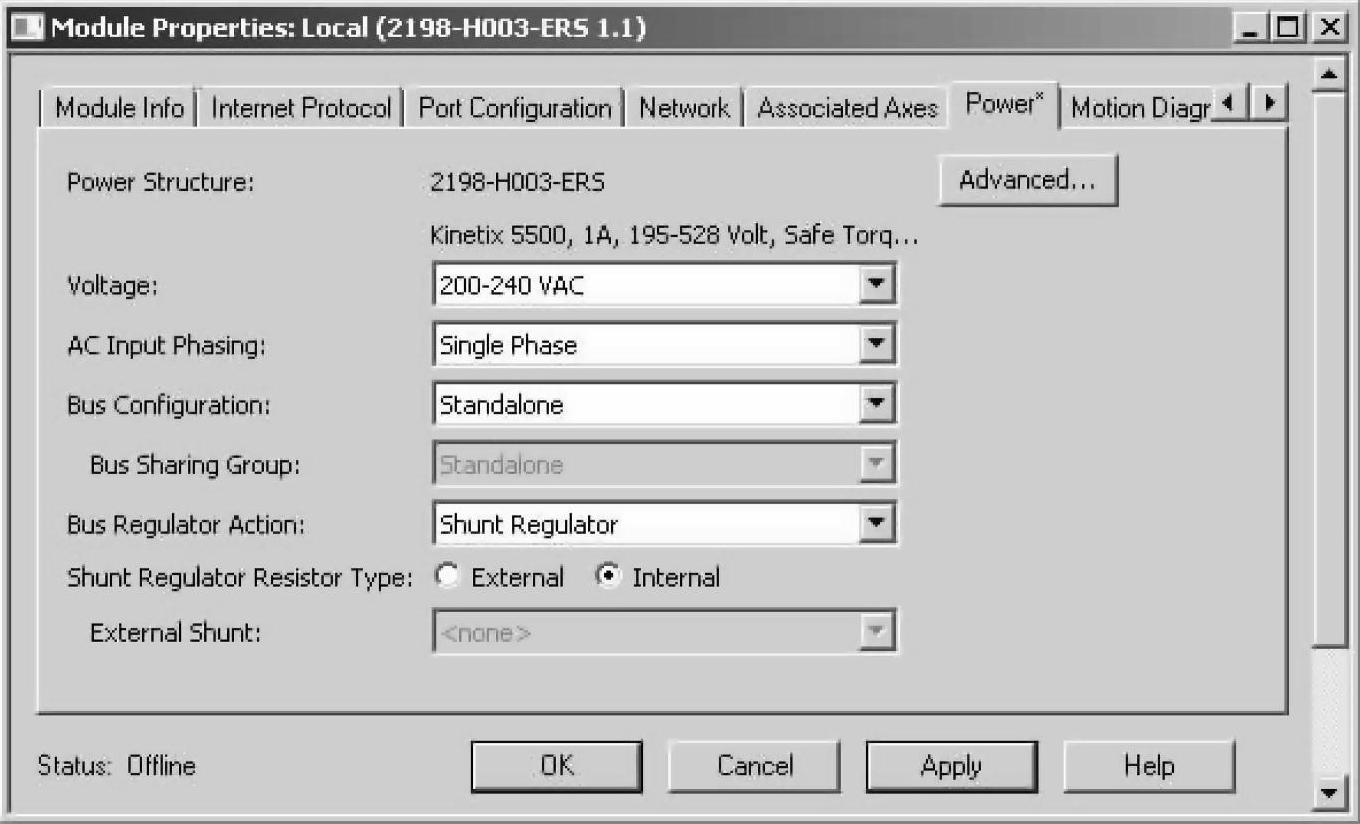
图6-72 供电组态页面
—Disabled:禁止内部调节电阻和外部调节电阻。
—Shunt Regulator:使能内部或外部的调节选项。
●Shunt Regulator Resistor Type:选择并励调节器电阻类型,外部或内部。
—Internal:使能内部调节,外部调节禁止。
—External:使能外部调节,内部调节禁止。
●External Shunt:外部并励电阻类型的选择,当选择外部调节器电阻时需指定。
—none:内部调节使能。
—2097-R7:外部调节选择。
为每一个伺服驱动器模块,重复以上的组态步骤。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





